一种基于改进粒子群算法的机械臂时间最优轨迹规划方法
本发明属于多自由度机械臂控制,涉及机械臂空间轨迹规划方法,具体涉及一种基于改进粒子群算法的机械臂时间最优轨迹规划方法。
背景技术:
1、随着制造业自动化要求的提高,对机械臂工作效率和运动平稳度的提升也变得尤为重要。轨迹规划是机械臂轨迹控制中不可或缺的环节,不同的运动轨迹具有不同的平滑性和冲击性,进而影响机械臂的驱动能耗、工作效率、使用寿命、运行平滑性和振动性等。因此,高性能的轨迹规划也成为了机械臂研究领域的重点。
2、轨迹规划的时间能直接反应机械臂的工作效率,也关系到其工作是否满足企业生产对时间的限制和要求,将时间作为轨迹规划的指标进行优化可以提高机械臂的工作效率和满足实际应用的需求。
3、现有的关于最优时间的轨迹规划化方法主要是根据粒子群算法进行单目标优化,没有考虑各个关节的约束条件,不能反映出整个机械臂运行时间的全局水平;另一方面,标准粒子群算法很容易陷入局部极值,从而不能得出时间的最优解,使得机械臂的工作效率降低。
技术实现思路
1、本发明的目的是提供一种基于改进粒子群算法的机械臂时间最优轨迹规划方法。
2、为达到上述目的,本发明采用如下技术方案:
3、一种基于改进粒子群算法的机械臂时间最优轨迹规划方法,其特征在于,包括如下步骤:
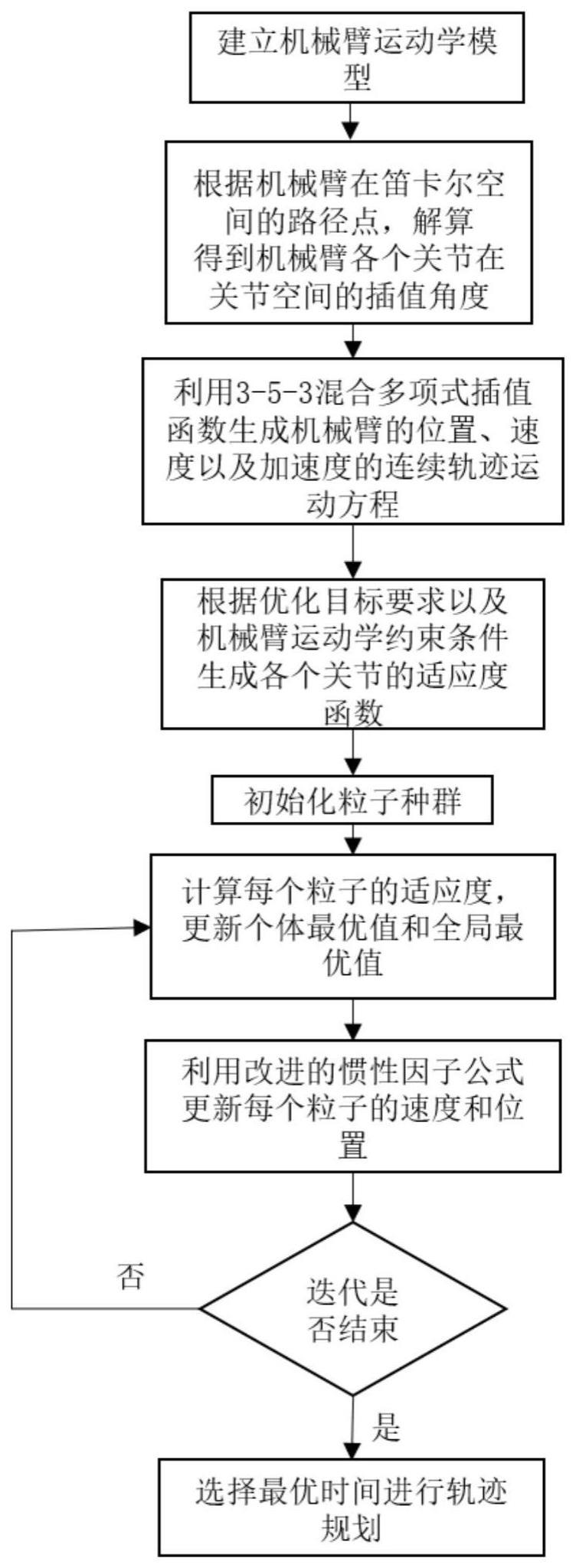
4、步骤1:根据建立的机械臂运动学模型,得到机械臂关节空间和末端笛卡尔空间的映射关系;
5、步骤2:根据机械臂在笛卡尔空间的路径点,通过步骤1映射关系即逆运动学解算得到机械臂各个关节在关节空间的插值角度;
6、步骤3:根据机械臂关节空间插值角度,利用3-5-3混合多项式插值函数生成机械臂的位置、速度以及加速度的连续轨迹运动方程;
7、步骤4:根据优化目标要求以及机械臂运动学约束条件生成各个关节的适应度函数:
8、
9、
10、
11、
12、fitness(t)j为第j个关节的适应度函数,j表示机械臂关节序号,取值为1到们之间的正整数,m为关节总个数,tij为为第j个关节的第i维度的时间,n为时间总维度,i表示维度序数,取值为1到n之间正整数,t表示时刻,qj(t)为第j个关节在第t时刻的位置值,vj(t)为第j个关节在第t时刻的速度值,aj(t)为第j个关节在第t时刻的加速度值,为第j个关节的位置限制最大值,为第j个关节的速度限制最大值,为第j个关节的加速度限制最大值;
13、步骤5:利用改进的粒子群算法对机械臂轨迹进行优化;
14、所述步骤5包括如下步骤:
15、s1:初始化粒子种群,随机生成种群,确定学习因子c1和c2和惯性权重因子w,将群体内的粒子i的所在位置和飞行速度进行初始化处理,并实现个体极值和群体极值的更新。
16、s2:计算粒子的适应度函数值,比较每个初始粒子的适应度函数值,将函数值最小的粒子作为全局最优粒子,并选出每个粒子的个体最优极值;
17、s3:根据飞行速度和位置条件,按照以下公式更新粒子在空间中的当前位置和飞行速度;
18、
19、
20、其中,i为粒子序数,d表示设计参数的维度,为第i个粒子的第d维k+1代速度值,为第i个粒子的第d维k+1代位置值,为第i个粒子的个体最优极值的第d维k代数值,粒子群中全局最优极值的第d维k代数值,r1,r2为[0,1]之间的随机任意值;
21、s4:根据更新后的粒子位置和速度,更新粒子对应的适应值;
22、s5:在对应适应值更新的基础上,更新种群里的个体极值和全局极值;
23、s6:判断算法是否到达最大迭代次数,若满足,则算法结束并将符合要求的解集输出,否则跳转至步骤s3。
24、作为优选,采取自适应惯性权重w调整方法,根据搜索过程的各个阶段采用相应大小的权重,即在搜索迭代早期,惯性权重较大,有利于保证算法的全局寻优效果;搜索迭代后期,惯性权重较小,有利于跳出局部最优陷阱,保持粒子群多样性,公式如下:
25、
26、其中,wmax、wmin分别为w的最大值和最小值;k、kmax分别为迭代次数的当前值和最大值。
27、与现有技术相比,本发明的优点在于:
28、(1)本发明使用的改进粒子群算法能够更快地搜索出机械臂各关节各段的最优运行时间,相比于传统的粒子群算法迭代速度更快,寻找得到的最优时间更短。
29、(2)本发明将粒子群算法中的速度更新公式中惯性权重w,按照搜索迭代次数的变化自适应调整惯性权重w的数值,加快了算法收敛速度,保证了算法全局与局部寻优的效果。
技术特征:
1.一种基于改进粒子群算法的机械臂时间最优轨迹规划方法,其特征在于,包括如下步骤:
2.如权利要求1所述的一种改进粒子群算法的机械臂时间最优轨迹优化方法,其特征在于:
技术总结
本发明公开了一种基于改进粒子群算法的机械臂时间最优轨迹规划方法,首先根据建立的机械臂运动学模型,得到机械臂关节空间和笛卡尔空间的映射关系;然后根据机械臂在笛卡尔空间的路径点,生成各关节的关节空间插值角度;其次根据关节空间插值角度,利用多项式插值函数生成机械臂各关节的连续轨迹运动方程;之后根据优化目标要求以及机械臂运动学约束条件生成各关节的适应度函数;最后利用改进粒子群算法对机械臂轨迹进行优化,得到最优解。本发明将改进的惯性权重加入到粒子群算法的速度更新中去,能够更快地搜索出机械臂各关节各段的最优运行时间,迭代速度更快,寻找得到的最优时间更短,提高了机械臂的工作效率。
技术研发人员:谢慕君,王野,姜长泓,郑伟义,边鹤羽,郑众
受保护的技术使用者:长春工业大学
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!