气动夹持装置及机械手的制作方法
本申请涉及工业机械手,特别是涉及一种气动夹持装置及机械手。
背景技术:
1、随着工业自动化技术的发展,出现了气动手指技术,利用压缩空气作为动力,用于夹取或抓取工件的执行装置。相较于液压驱动、电力驱动,其反应速度更快、使用成本更低,相对的,气动手指的夹持力较小且占用体积较大。
2、在生产制造中,随着对产品的使用性能要求越来越高,产品的加工精度和装配精度也随之提高。在产品的加工过程中,为提高装配精度常常使用销钉进行定位配合,由此使得销钉具有非常广泛的应用范围。而在产品销钉孔的加工过程涉及销钉的插拔,销钉由于用于定位从而其公差精度要求高,并且一般为小直径且表面光滑的圆柱形外形,所以销钉孔加工拔销钉时相对困难。
3、中国专利cn103987498a公开了一种抓取或夹紧装置,其带有:能够由驱动装置驱动的至少一个调节环节;至少一个滑块;以及设置在调节环节和滑块之间的传动装置,其中由驱动装置产生的力至少通过设置在传动装置上的和/或夹紧装置上的力传递元件,或者通过其形成的力传递元件向物体传递,其中力传递元件包括力传导区段,其中在力传导区段和力传递元件之间设置有允许力传递方向上的弹性可缩性的缓冲元件。其虽然设置有力传递元件并在配合下夹紧工件,但并未对力传递元件的结构做进一步限定以实现高精度的夹紧效果。
4、中国专利cn115805601a公开了一种平行夹爪,包括:第一夹钳和第二夹钳;缸体,具有第一腔室和第二腔室;第一活塞结构,与第一夹钳连接并将第一腔室分隔成第一传动腔和第一驱动腔,第一活塞结构能在第一驱动腔内驱动介质的驱动下沿第一夹钳的张开方向滑动;第二活塞结构,与第二夹钳连接并将第二腔室分隔成第二传动腔和第二驱动腔,第二活塞结构能在第二驱动腔内驱动介质的驱动下沿第二夹钳的闭合方向滑动;其中,第一传动腔和第二传动腔相连通并填充有传动介质。其主要贡献在于实现了夹爪的小型化以及降低加工精度要求等,但是并不涉及如何实现小尺寸工件的夹紧。
5、综上所述,针对本申请提出的技术问题,目前尚未提出有效的解决方案。
技术实现思路
1、基于此,本申请针对销钉孔加工拔销钉时相对困难的问题,提供一种气动夹持装置及机械手。
2、第一方面,本申请提供一种气动夹持装置,包括:驱动组件,包括驱动杆及设置于驱动杆一端的滑块,滑块被配置为能够在驱动杆的驱动下沿第一方向运动;第一方向为驱动杆的轴向方向;
3、活动组件,包括第一手指及第二手指,分别沿第二方向耦合于滑块的相对两侧,第一手指及第二手指被配置为跟随滑块的移动而相对靠近或远离;第二方向为驱动杆的径向方向;
4、滑块的相对两侧被设置为斜面,斜面被配置为将第一方向的力转换为第二方向的力;
5、夹持组件,包括第一夹爪及第二夹爪,第一夹爪与第一手指连接,第二夹爪与第二手指连接,第一夹爪及第二夹爪之间对置形成有一对夹持槽;
6、夹持槽包括至少两个侧壁,两个侧壁呈v型设置,用于分别与工件相抵接以提供支持力;夹持槽在侧壁的夹角处设置有弧形凹槽,用于增加夹持槽与工件夹持面积;
7、其中,当第一手指及第二手指相对靠近时,一对夹持槽的四个侧壁与工件之间线接触,并合围形成夹持空间。
8、在其中一个实施例中,活动组件还包括第一导轨,第一导轨设置于斜面上,用于与第一手指相配合以引导第一手指的移动轨迹;第二手指处对应设置有第二导轨,第二导轨与第一导轨相对地镜像设置,用于限定第二手指的移动轨迹
9、在其中一个实施例中,第一手指与斜面的夹角的余角范围为5°-15°。
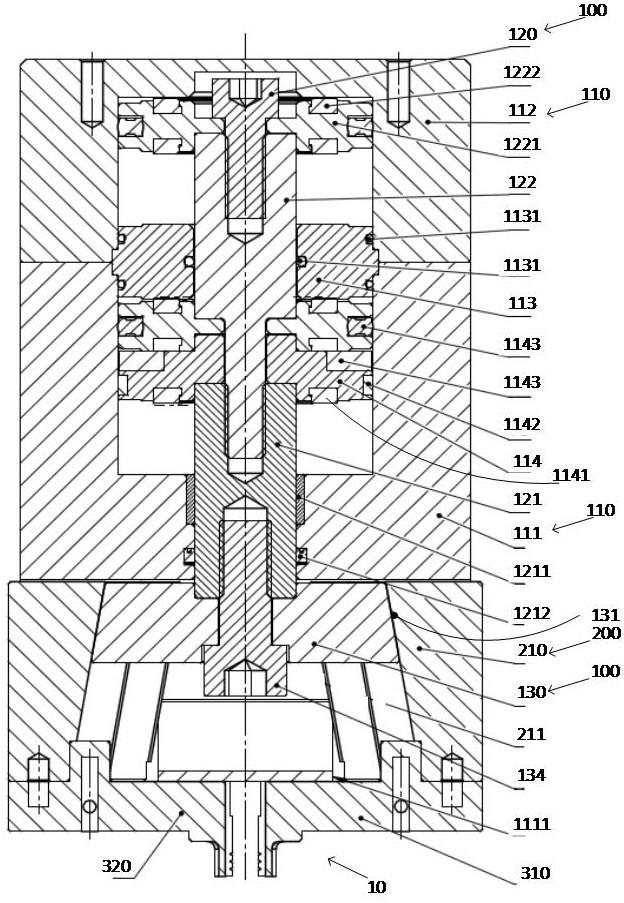
10、在其中一个实施例中,驱动杆包括前端活塞杆及后端活塞杆,驱动组件包括壳体,壳体包括前端缸筒及后端缸筒,前端活塞杆位于前端缸筒内;后端活塞杆的主体位于后端缸筒内,部分伸入前端缸筒内与前端活塞杆固定连接,前端缸筒的顶部设置有盖板,后端活塞杆的外侧套设有非缓冲型活塞,非缓冲型活塞的外侧抵接于后端缸筒的内壁;滑块设置于前端活塞杆相对远离后端活塞杆的另一端上,滑块通过固定螺栓与后端活塞杆固定连接。
11、在其中一个实施例中,非缓冲型活塞朝向后端缸筒底壁的一侧上单独设置有缓冲垫;后端活塞杆相对远离非缓冲型活塞的另一端与前端活塞杆连接,后端缸筒与前端缸筒的连接处设置有中盖,在中盖内覆盖后端活塞杆的位置套设有o型圈;前端缸筒内相对靠近中盖的一侧设置有磁石安装座,磁石安装座靠近前端缸筒内壁的一侧设置有磁环、气缸耐磨环以及活塞双向密封圈;磁石安装座中心穿设前端活塞杆,前端活塞杆上设置有自润滑轴承及u型密封圈。
12、在其中一个实施例中,第一夹爪的内壁依次设置有3个夹持槽,分别为第一夹持槽、第二夹持槽以及第三夹持槽,第三夹持槽、第一夹持槽及第二夹持槽的侧壁长度半径依次增加。
13、在其中一个实施例中,工件包括定位销钉,夹持组件夹持的定位销钉的直径范围为0.8mm-5mm。
14、在其中一个实施例中,所述夹持槽包括多个,多个所述夹持槽具有不同的直径。
15、在其中一个实施例中,所述夹持槽包括至少两个侧壁,两个所述侧壁呈v型设置,用于分别与工件相抵接以提供支持力。
16、在其中一个实施例中,所述夹持槽在所述侧壁的夹角处设置有弧形凹槽,用于增加所述夹持槽与所述工件夹持面积。
17、在其中一个实施例中,所述夹持槽的内壁上设置有防滑结构,用于提高摩擦系数。
18、在其中一个实施例中,所述滑块上设置有感应块,所述气动夹持装置靠近所述夹持组件的一端设置有接近开关,所述接近开关被配置为通过检测所述感应块的位置判断所述夹持组件的状态。
19、第二方面,本申请还提供一种机械手,包括薄型气缸、导轨组件以及如第一方面所述的气动夹持装置,所述气动夹持装置被配置为在所述薄型气缸的作用下,夹持工件并沿所述导轨组件预设的移动轨迹进行移动以将所述工件进行插拔。
20、综上所述,本申请提供的气动夹持装置,具有以下有益技术效果:
21、1.通过导轨与机械手指的配合,将第一方向的驱动力转变为第二方向的夹持力,实现了力方向的转换。
22、2.同时通过限定机械手指与滑块之间的夹角,提升了夹持力的大小,提供更加稳固的夹持效果。
23、3.夹爪的夹持槽设计,能够适应不同直径尺寸的定位销钉,提升了夹持组件对不同工况的适应性,并且通过设置防滑结构增大摩擦力,进一步提高了夹持的稳定性。
技术特征:
1.一种气动夹持装置,其特征在于,包括:
2.根据权利要求1所述的装置,其特征在于,所述活动组件(200)还包括第一导轨(211),所述第一导轨(211)设置于所述斜面(131)上,用于与所述第一手指(210)相配合以引导所述第一手指(210)的移动轨迹;所述第二手指(220)处对应设置有第二导轨(221),所述第二导轨(221)与所述第一导轨(211)相对地镜像设置,用于限定所述第二手指(220)的移动轨迹。
3.根据权利要求1所述的装置,其特征在于,所述第一手指(210)与所述斜面(131)的夹角的余角范围为5°-15°。
4.根据权利要求1所述的装置,其特征在于,所述驱动杆(120)包括前端活塞杆(121)及后端活塞杆(122),所述驱动组件(100)包括壳体(110),壳体(110)包括前端缸筒(111)及后端缸筒(112),所述前端活塞杆(121)位于所述前端缸筒(111)内;所述后端活塞杆(122)的主体位于所述后端缸筒(112)内,部分伸入所述前端缸筒(111)内与所述前端活塞杆(121)固定连接,所述前端缸筒(111)的顶部设置有盖板(1111),所述后端活塞杆(122)的外侧套设有非缓冲型活塞(1221),所述非缓冲型活塞(1221)的外侧抵接于所述后端缸筒(112)的内壁;所述滑块(130)设置于前端活塞杆(121)相对远离后端活塞杆(122)的另一端上,所述滑块(130)通过固定螺栓(134)与后端活塞杆(122)固定连接。
5.根据权利要求4所述的装置,其特征在于,所述非缓冲型活塞(1221)朝向所述后端缸筒(112)底壁的一侧上单独设置有缓冲垫(1222);所述后端活塞杆(122)相对远离所述非缓冲型活塞(1221)的另一端与所述前端活塞杆(121)连接,所述后端缸筒(112)与所述前端缸筒(111)的连接处设置有中盖(113),在所述中盖(113)内覆盖所述后端活塞杆(122)的位置套设有o型圈(1131);所述前端缸筒(111)内相对靠近所述中盖(113)的一侧设置有磁石安装座(114),所述磁石安装座(114)靠近所述前端缸筒(111)内壁的一侧设置有磁环(1141)、气缸耐磨环(1142)以及活塞双向密封圈(1143);所述磁石安装座(114)中心穿设所述前端活塞杆(121),所述前端活塞杆(121)上设置有自润滑轴承(1211)及u型密封圈(1212)。
6.根据权利要求1所述的装置,其特征在于,所述第一夹爪(310)的内壁依次设置有3个夹持槽(311),分别为第一夹持槽(3111)、第二夹持槽(3112)以及第三夹持槽(3113),第三夹持槽(3113)、第一夹持槽(3111)及第二夹持槽(3112)的侧壁长度半径依次增加。
7.根据权利要求1所述的装置,其特征在于,所述工件包括定位销钉,所述夹持组件(300)夹持的所述定位销钉的直径范围为0.8mm-5mm。
8.根据权利要求1至7中任一项所述的装置,其特征在于,所述夹持槽(311)的内壁上设置有防滑结构(3115),用于提高摩擦系数。
9.根据权利要求1所述的装置,其特征在于,所述滑块(130)上设置有感应块(132),所述气动夹持装置(10)靠近所述夹持组件(300)的一端设置有接近开关(133),所述接近开关(133)被配置为通过检测所述感应块(132)的位置判断所述夹持组件(300)的状态。
10.一种机械手,其特征在于,包括薄型气缸(20)、导轨组件(60)以及如权利要求1至9中任一项所述的气动夹持装置(10),所述气动夹持装置(10)被配置为在所述薄型气缸(20)的作用下,夹持工件并沿所述导轨组件(60)预设的移动轨迹进行移动以将所述工件进行插拔。
技术总结
本申请提供一种气动夹持装置及机械手,涉及工业机械手技术领域,所述气动夹持装置包括:驱动组件包括驱动杆及设置于驱动杆一端的滑块,滑块被配置为能够在驱动杆的驱动下沿第一方向运动;活动组件包括第一手指及第二手指,分别沿第二方向耦合于滑块的相对两侧,第一手指及第二手指被配置为跟随滑块的移动而相对靠近或远离;夹持组件包括第一夹爪及第二夹爪,第一夹爪与第一手指连接,第二夹爪与第二手指连接,第一夹爪及第二夹爪之间对置形成有一对夹持槽;其中,当第一手指及第二手指相对靠近时,一对夹持槽合围形成夹持空间。本申请解决或部分解决销钉孔加工拔销钉时相对困难的问题。
技术研发人员:夏廷涛,胡威,陈海鹏
受保护的技术使用者:深圳市恒拓高工业技术股份有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!