一种机器人末端轴夹持机构的制作方法
本发明涉及机械夹具领域,尤其提供一种机器人末端轴夹持机构。
背景技术:
1、机械人在各个领域已经得到广泛应用,其使用的加持装置因具体工作环境而异。随着控制技术的方法的提升及发展,机械人所具有的操作方便,准确性高的特点,被迅速引起关注及投入使用,而现有的机器人夹具装置存在装置安装程序复杂、穿刺针得拆卸不便及固定效果问题。
技术实现思路
1、基于此,有必要提供一种机器人末端轴夹持机构,以解决背景技术中的至少一个技术问题。
2、一种机器人末端轴夹持机构,包括连接组件、固定组件、夹钳组件及缓冲稳固组件,连接组件顶部固定安装于机械人末端轴底部,固定组件安装于连接组件底部,固定组件侧壁凹设有安装腔及夹持腔,安装腔与夹持腔相互连通,夹钳组件的一端安装于安装腔及夹持腔中,夹钳组件另一端贯穿凹设有引导孔,引导孔中设置有穿刺针,缓冲稳固组件安装于安装腔中。
3、作为本发明的进一步改进,连接组件包括连接盘及连接立柱,连接盘顶部固定安装于机械人末端轴底部,连接立柱顶面固定安装于连接盘底面中部,连接立柱一侧侧壁的底部凸设有安装台,安装台侧壁凹设有安装槽,安装槽顶面邻近连接立柱一端中部贯穿凹设有预设孔,安装台顶面中部沿长度方向凹设有滑动槽,滑动槽邻近预设孔设置,安装台顶面及底面远离连接立柱一端均凸设有第一卡设凸起。
4、作为本发明的进一步改进,固定组件包括固定外壳、夹持外壳及圆柱销限制块,安装腔凹设形成于固定外壳外侧侧壁一端,固定外壳外周壁中部凹设有限位槽,安装槽套设安装于限位槽中,使得固定外壳安装于连接立柱的安装台中,固定外壳外侧侧壁一端中部凸设有插销,固定外壳外侧侧壁四个角部处均凸设有第一连接卡扣,夹持腔凹设形成于夹持外壳凹设形成于固定外壳外侧侧壁一端,夹持腔内壁中部凸设有两个限位环,两个限位环沿夹持腔长度方向间隔设置,夹持外壳内侧侧壁四个角部处均向夹持腔中心凸设有第二卡设凸起,四个第二卡设凸起分别与四个第一连接卡扣相对设置,夹持外壳内侧侧壁一端凹设有插销槽,插销槽与插销相对设置,夹持外壳顶部及底面均凸设有第二连接卡扣,两个第二连接卡扣分别卡设安装于两个第一卡设凸起中,且插销插设于插销槽中、四个第二卡设凸起分别卡设安装于四个第一连接卡扣中,使得夹持外壳安装于安装台外侧及固定外壳外侧,圆柱销限制块卡设安装于两个限位环之间。
5、作为本发明的进一步改进,安装腔邻近插销一端端壁中部贯穿开设有第一进风孔,安装腔底面中部凸设有分隔板,使得安装腔左右分隔形成压缩腔及导风腔,压缩腔邻近插销设置,分隔板侧壁中部贯穿凹设有第二进风孔,使得压缩腔及导风腔相互连通,第二进风孔内设置有单向阀,导风腔底面邻近分隔板一端的内侧角部处凹设有第一转动孔,导风腔顶面角部处贯穿开设有第二转动孔,第二转动孔与第一转动孔及预设孔相对设置。
6、作为本发明的进一步改进,夹持腔内侧侧壁中部凸设有限位柱,限位柱位于两个限位环之间。
7、作为本发明的进一步改进,圆柱销限制块呈形状,圆柱销限制块内侧侧壁贯穿开设有限位孔,限位柱穿设通过限位孔,圆柱销限制块顶面及底面邻近固定外壳一端均贯穿凹设有第三转动孔,两个第三转动孔相对设置。
8、作为本发明的进一步改进,夹钳组件包括固定夹钳及活动臂,固定夹钳一端固定安装于固定外壳远离插销一侧侧壁中,固定夹钳另一端顶面内侧贯穿凹设有固定引导槽,活动臂一端转动地安装于夹持腔中,活动臂另一端顶面内侧贯穿凹设有活动引导槽,且活动臂内侧侧壁贴合与固定夹钳内侧侧壁,使得固定引导槽与活动引导槽相互合围,引导孔由固定引导槽与活动引导槽相互合围形成。
9、作为本发明的进一步改进,固定夹钳内侧侧壁远离固定外壳一端凹设有引导槽,固定夹钳顶面另一端凸设有第三卡设凸起。
10、作为本发明的进一步改进,活动臂内侧侧壁远离固定外壳一端凸设有引导块,引导块穿设进入引导槽中,活动臂顶面中部凸设有第三连接卡扣,第三连接卡扣卡设于第三卡设凸起中,活动臂外周壁另一端凸设有密封围块,活动臂顶面邻近插销槽一端贯穿凹设有第五转动孔,第五转动孔内设置有圆柱销,圆柱销两端转动地安装于两个第三转动孔中,活动臂内侧侧壁邻近插销槽一端凸设有凸块,凸块侧壁贯穿开设有进风槽,进风槽与第一进风孔相对设置。
11、作为本发明的进一步改进,缓冲稳固组件包括缓冲弹簧、缓冲气囊、转动柱、导风板、连接柱、锥齿轮及直尺条,缓冲弹簧一端固定安装于安装腔邻近第一进风孔一侧中,缓冲弹簧另一端固定安装于凸块侧壁,缓冲气囊一侧侧壁固定安装于分隔板远离压缩腔一侧侧壁中,缓冲气囊另一侧侧壁固定安装于凸块远离缓冲弹簧一侧侧壁,缓冲气囊邻近分隔板一侧侧壁贯穿开设有出风孔,出风孔与第二进风孔相对设置,缓冲气囊另一侧侧壁沿长度方向等距贯穿开设有多个第三进风孔,多个第三进风孔均与进风槽相对设置,转动柱的两端分别转动地安装于第二转动孔及第一转动孔中,转动柱外周壁两端均凹设有扭簧槽,每个扭簧槽内壁设置有扭簧,扭簧一端固定安装于安装腔内壁中,导风板一端固定安装于转动柱外壁,导风板另一端抵持于活动臂内侧侧壁,连接柱底面穿设通过预设孔固定安装于转动柱顶面,锥齿轮底面固定安装于连接柱顶面,直尺条底部滑动地安装于滑动槽中,且直尺条与锥齿轮啮合连接,直尺条一端抵持于第二连接卡扣侧壁。
12、本发明的有益效果如下:
13、1.通过固定组件及夹钳组件,使得在对穿刺针安装和锁定过程中更加方便稳固,且利用缓冲弹簧和圆柱销实现活动臂的转动,实现夹具的打开和关闭,达到对夹持机构在机械人末端能够一步安装到位,且开关便捷,便于穿刺针的夹持和取下。
14、2.运用固定组件、夹钳组件及缓冲稳固组件在需要取出或更换穿刺针时,能够产生清洁气流防止机器人在实际工作过程中灰尘、碎屑掉落并粘附活动臂与固定夹钳之间的缝隙中,同时冲出的气流将辅助活动臂打开使得活动臂打开更为顺畅,且能够防止过大力量和冲击,从而提高了装置的操作性能和稳定性,同时还能使得第二连接卡扣与第一卡设凸起卡设更为紧密,防止在活动臂打开的过程中,由于摩檫力或清洁气流流出震动使得第二连接卡扣与第一卡设凸起的连接松动,使得夹持外壳脱离、甚至掉落,保证连接的稳固性,进一步提升了装置的可靠性和稳定性。
15、3.当需要安装穿刺针时,能够在扭簧扭力、缓冲气囊恢复作用力及缓冲弹簧压缩作用力的作用下,完成闭合操作,防止活动臂闭合过快或闭合力度过大,防止在活动臂与固定夹钳接触时对夹持机构产生震动或导致夹持机构发生位移,提升装置的稳定性。
16、4.夹持机构对穿刺针保持夹持时,利用穿刺针在工作时穿刺产生得震动,使得在导风腔中产生高压环境,使得在后续需要取出或更换穿刺针而打开活动臂时,所产生的清洁气流流速更快,对活动臂及固定夹钳的清洁作用更强。
技术特征:
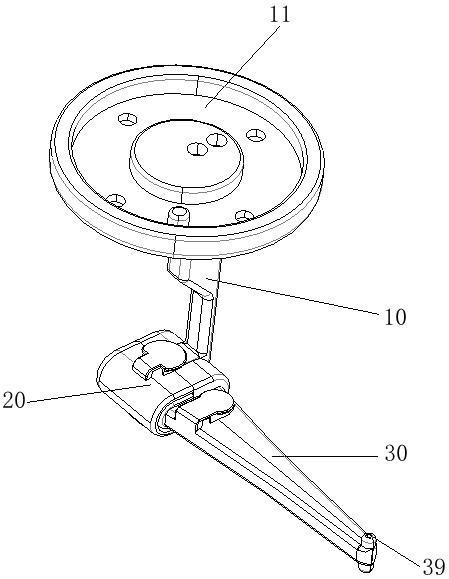
1.一种机器人末端轴夹持机构,其特征在于:包括连接组件(10)、固定组件(20)、夹钳组件(30)及缓冲稳固组件(40),连接组件(10)顶部固定安装于机械人末端轴底部,固定组件(20)安装于连接组件(10)底部,固定组件(20)侧壁凹设有安装腔(21)及夹持腔(22),安装腔(21)与夹持腔(22)相互连通,夹钳组件(30)的一端安装于安装腔(21)及夹持腔(22)中,夹钳组件(30)另一端贯穿凹设有引导孔(39),引导孔(39)中设置有穿刺针,缓冲稳固组件(40)安装于安装腔(21)中。
2.根据权利要求1所述的机器人末端轴夹持机构,其特征在于:连接组件(10)包括连接盘(11)及连接立柱(12),连接盘(11)顶部固定安装于机械人末端轴底部,连接立柱(12)顶面固定安装于连接盘(11)底面中部,连接立柱(12)一侧侧壁的底部凸设有安装台(13),安装台(13)侧壁凹设有安装槽(14),安装槽(14)顶面邻近连接立柱(12)一端中部贯穿凹设有预设孔(15),安装台(13)顶面中部沿长度方向凹设有滑动槽(16),滑动槽(16)邻近预设孔(15)设置,安装台(13)顶面及底面远离连接立柱(12)一端均凸设有第一卡设凸起(17)。
3.根据权利要求2所述的机器人末端轴夹持机构,其特征在于:固定组件(20)包括固定外壳(25)、夹持外壳(26)及圆柱销限制块(23),安装腔(21)凹设形成于固定外壳(25)外侧侧壁一端,固定外壳(25)外周壁中部凹设有限位槽(211),安装槽(14)套设安装于限位槽(211)中,使得固定外壳(25)安装于连接立柱(12)的安装台(13)中,固定外壳(25)外侧侧壁一端中部凸设有插销(212),固定外壳(25)外侧侧壁四个角部处均凸设有第一连接卡扣(213),夹持腔(22)凹设形成于夹持外壳(26)凹设形成于固定外壳(25)外侧侧壁一端,夹持腔(22)内壁中部凸设有两个限位环(221),两个限位环(221)沿夹持腔(22)长度方向间隔设置,夹持外壳(26)内侧侧壁四个角部处均向夹持腔(22)中心凸设有第二卡设凸起(222),四个第二卡设凸起(222)分别与四个第一连接卡扣(213)相对设置,夹持外壳(26)内侧侧壁一端凹设有插销槽(223),插销槽(223)与插销(212)相对设置,夹持外壳(26)顶部及底面均凸设有第二连接卡扣(224),两个第二连接卡扣(224)分别卡设安装于两个第一卡设凸起(17)中,且插销(212)插设于插销槽(223)中、四个第二卡设凸起(222)分别卡设安装于四个第一连接卡扣(213)中,使得夹持外壳(26)安装于安装台(13)外侧及固定外壳(25)外侧,圆柱销限制块(23)卡设安装于两个限位环(221)之间。
4.根据权利要求3所述的机器人末端轴夹持机构,其特征在于:安装腔(21)邻近插销(212)一端端壁中部贯穿开设有第一进风孔(214),安装腔(21)底面中部凸设有分隔板(215),使得安装腔(21)左右分隔形成压缩腔(216)及导风腔(217),压缩腔(216)邻近插销(212)设置,分隔板(215)侧壁中部贯穿凹设有第二进风孔(218),使得压缩腔(216)及导风腔(217)相互连通,第二进风孔(218)内设置有单向阀(219),导风腔(217)底面邻近分隔板(215)一端的内侧角部处凹设有第一转动孔(241),导风腔(217)顶面角部处贯穿开设有第二转动孔(242),第二转动孔(242)与第一转动孔(241)及预设孔(15)相对设置。
5.根据权利要求4所述的机器人末端轴夹持机构,其特征在于:夹持腔(22)内侧侧壁中部凸设有限位柱(225),限位柱(225)位于两个限位环(221)之间。
6.根据权利要求5所述的机器人末端轴夹持机构,其特征在于:圆柱销限制块(23)呈形状,圆柱销限制块(23)内侧侧壁贯穿开设有限位孔(231),限位柱(225)穿设通过限位孔(231),圆柱销限制块(23)顶面及底面邻近固定外壳(25)一端均贯穿凹设有第三转动孔(232),两个第三转动孔(232)相对设置。
7.根据权利要求6所述的机器人末端轴夹持机构,其特征在于:夹钳组件(30)包括固定夹钳(31)及活动臂(32),固定夹钳(31)一端固定安装于固定外壳(25)远离插销(212)一侧侧壁中,固定夹钳(31)另一端顶面内侧贯穿凹设有固定引导槽(311),活动臂(32)一端转动地安装于夹持腔(22)中,活动臂(32)另一端顶面内侧贯穿凹设有活动引导槽(321),且活动臂(32)内侧侧壁贴合与固定夹钳(31)内侧侧壁,使得固定引导槽(311)与活动引导槽(321)相互合围,引导孔(39)由固定引导槽(311)与活动引导槽(321)相互合围形成。
8.根据权利要求7所述的机器人末端轴夹持机构,其特征在于:固定夹钳(31)内侧侧壁远离固定外壳(25)一端凹设有引导槽(312),固定夹钳(31)顶面另一端凸设有第三卡设凸起(313)。
9.根据权利要求8所述的机器人末端轴夹持机构,其特征在于:活动臂(32)内侧侧壁远离固定外壳(25)一端凸设有引导块(322),引导块(322)穿设进入引导槽(312)中,活动臂(32)顶面中部凸设有第三连接卡扣(323),第三连接卡扣(323)卡设于第三卡设凸起(313)中,活动臂(32)外周壁另一端凸设有密封围块(324),活动臂(32)顶面邻近插销槽(223)一端贯穿凹设有第五转动孔(325),第五转动孔(325)内设置有圆柱销,圆柱销两端转动地安装于两个第三转动孔(232)中,活动臂(32)内侧侧壁邻近插销槽(223)一端凸设有凸块(326),凸块(326)侧壁贯穿开设有进风槽(327),进风槽(327)与第一进风孔(214)相对设置。
10.根据权利要求9所述的机器人末端轴夹持机构,其特征在于:缓冲稳固组件(40)包括缓冲弹簧(41)、缓冲气囊(42)、转动柱(43)、导风板(44)、连接柱(45)、锥齿轮(46)及直尺条(47),缓冲弹簧(41)一端固定安装于安装腔(21)邻近第一进风孔(214)一侧中,缓冲弹簧(41)另一端固定安装于凸块(326)侧壁,缓冲气囊(42)一侧侧壁固定安装于分隔板(215)远离压缩腔(216)一侧侧壁中,缓冲气囊(42)另一侧侧壁固定安装于凸块(326)远离缓冲弹簧(41)一侧侧壁,缓冲气囊(42)邻近分隔板(215)一侧侧壁贯穿开设有出风孔(421),出风孔(421)与第二进风孔(218)相对设置,缓冲气囊(42)另一侧侧壁沿长度方向等距贯穿开设有多个第三进风孔(422),多个第三进风孔(422)均与进风槽(327)相对设置,转动柱(43)的两端分别转动地安装于第二转动孔(242)及第一转动孔(241)中,转动柱(43)外周壁两端均凹设有扭簧槽(431),每个扭簧槽(431)内壁设置有扭簧(432),扭簧(432)一端固定安装于安装腔(21)内壁中,导风板(44)一端固定安装于转动柱(43)外壁,导风板(44)另一端抵持于活动臂(32)内侧侧壁,连接柱(45)底面穿设通过预设孔(15)固定安装于转动柱(43)顶面,锥齿轮(46)底面固定安装于连接柱(45)顶面,直尺条(47)底部滑动地安装于滑动槽(16)中,且直尺条(47)与锥齿轮(46)啮合连接,直尺条(47)一端抵持于第二连接卡扣(224)侧壁。
技术总结
本发明涉及机械夹具技术领域,尤其提供一种机器人末端轴夹持机构。该机器人末端轴夹持机构包括连接组件、固定组件、夹钳组件及缓冲稳固组件。本发明运用固定组件及夹钳组件,使得在对穿刺针安装和锁定过程中更加方便稳固,且利用缓冲弹簧和圆柱销实现活动臂的转动,实现夹具的打开和关闭,达到对夹持机构在机械人末端能够一步安装到位,且开关便捷,便于穿刺针的夹持和取下,同时产生清洁气流防止机器人在实际工作过程中灰尘、碎屑掉落并粘附活动臂与固定夹钳之间的缝隙中,同时冲出的气流将辅助活动臂打开使得活动臂打开更为顺畅,且能够防止过大力量和冲击,从而提高了装置的操作性能和稳定性。
技术研发人员:姜冠群,郭永
受保护的技术使用者:山东卓业医疗科技有限公司
技术研发日:
技术公布日:2024/4/22
- 还没有人留言评论。精彩留言会获得点赞!