一种多关节机械臂的运动学逆解求解方法及装置与流程
本申请涉及机械臂,具体涉及一种多关节机械臂的运动学逆解求解方法及装置。
背景技术:
1、目前,可控热核聚变反应装置大多采用托卡马克环流器对反应物质进行磁约束,托卡马克环流器是一个封闭的环形腔,故需要使用多关节机械臂对其进行维护作业。多关节机械臂关节数量多,其工作时通过聚变堆侧面的窗口进入环形腔的内部,需要保证多关节机械臂与窗口边缘以及环形腔的内壁有一定的安全距离,并且多关节机械臂自身各连杆之间也不能发生空间干涉,同时为了完全覆盖托卡马克环流器环形腔的内部区域,多关节机械臂需要具有冗余的自由度。空间约束条件和冗余自由度使多关节机械臂的运动学逆解求解困难。
2、现有技术中,对于多关节机械臂的运动学逆解求解,主要有数值解法和搜索解法。由于冗余自由度机械臂的运动学逆解存在无数种解,但又不存在解析解,因此现有技术的求解方法难以保证求解结果的准确性,同时又兼顾求解效率。
技术实现思路
1、有鉴于此,本发明实施例所解决的技术问题之一在于提供一种多关节机械臂的运动学逆解求解方法及装置,用以克服现有技术中对多关节机械臂的运动学逆解求解时存在求解结果不准确、求解效率低的问题。
2、本申请实施例第一方面公开一种多关节机械臂的运动学逆解求解方法,所述方法包括:
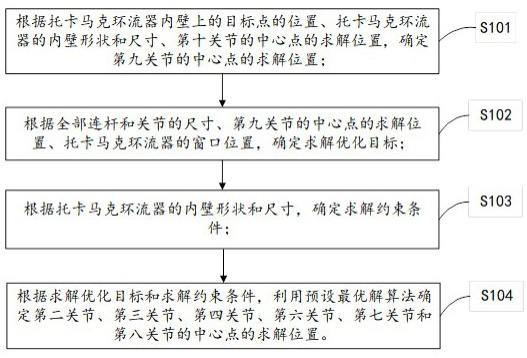
3、根据所述托卡马克环流器内壁上的目标点的位置、所述托卡马克环流器的内壁形状和尺寸、所述第十关节的中心点的求解位置,确定所述第九关节的中心点的求解位置;其中,所述目标点、所述第十关节的中心点、所述第九关节的中心点的求解位置位于同一直线上,且所述第九关节的中心点和所述第十关节的中心点的求解位置的连线垂直于所述托卡马克环流器的内壁;
4、根据全部连杆和关节的尺寸、所述第九关节的中心点的求解位置、所述托卡马克环流器的窗口位置,确定求解优化目标;其中,所述求解优化目标为穿过所述窗口的连杆或者关节需经过所述窗口的中心点;
5、根据所述托卡马克环流器的内壁形状和尺寸,确定求解约束条件;其中,所述求解约束条件为除了通过所述窗口的连杆或关节外,其他连杆或者关节均位于所述托卡马克环流器的内部或者外部;
6、根据所述求解优化目标和所述求解约束条件,利用预设最优解算法确定所述第二关节、所述第三关节、所述第四关节 、所述第六关节、所述第七关节和所述第八关节的中心点的求解位置。
7、本申请实施例第二方面公开一种多关节机械臂的运动学逆解求解装置,所述装置包括:
8、第一求解位置获取模块,用于根据所述托卡马克环流器内壁上的目标点的位置、所述托卡马克环流器的内壁形状和尺寸、所述第十关节的中心点的求解位置,确定所述第九关节的中心点的求解位置;其中,所述目标点、所述第十关节的中心点、所述第九关节的中心点的求解位置位于同一直线上,且所述第九关节的中心点和所述第十关节的中心点的求解位置的连线垂直于所述托卡马克环流器的内壁;
9、目标构建模块,用于根据全部连杆和关节的尺寸、所述第九关节的中心点的求解位置、所述托卡马克环流器的窗口位置,确定求解优化目标;其中,所述求解优化目标为穿过所述窗口的连杆或者关节需经过所述窗口的中心点;
10、约束构建模块,用于根据所述托卡马克环流器的内壁形状和尺寸,确定求解约束条件;其中,所述求解约束条件为除了通过所述窗口的连杆或关节外,其他连杆或者关节均位于所述托卡马克环流器的内部或者外部;
11、最优解算法模块,根据所述求解优化目标和所述求解约束条件,利用预设最优解算法确定所述第二关节、所述第三关节、所述第四关节、所述第六关节、所述第七关节和所述第八关节的中心点的求解位置。
12、本发明实施例基于托卡马克环流器和多关节机械臂的结构,通过目标点的位置、托卡马克环流器的内壁形状和尺寸、第十关节的中心点的求解位置,确定第九关节的中心点的求解位置,进一步确定求解优化目标和求解约束条件,使用最优解算法确定多关节机械臂余下关节中心点的求解位置。故与现有技术相比,本发明实施例的求解方法既可以实现快速求解,又可以保证求解结果的可靠性。
技术特征:
1.一种多关节机械臂的运动学逆解求解方法,其特征在于,所述多关节机械臂用于对托卡马克环流器进行维护作业;所述多关节机械臂包括通过连杆依次连接的第一关节、第二关节、第三关节、第四关节、第五关节、第六关节、第七关节、第八关节、第九关节和第十关节,其中,所述第一关节为直线移动关节,所述第二关节、所述第三关节、所述第四关节、所述第六关节、所述第七关节、所述第八关节和所述第九关节为转动关节,所述第五关节和所述第十关节为回转关节;所述第二关节、所述第三关节、所述第四关节的转动轴线相互平行,所述第五关节的转动轴线与所述第四关节的转动轴线相互垂直,所述第六关节的转动轴线与所述第五关节的转动轴线相互垂直,所述第七关节的转动轴线与所述第六关节的转动轴线相互垂直,所述第八关节的转动轴线与所述第七关节的转动轴线相互垂直,所述第九关节的转动轴线与所述第八关节的转动轴线相互垂直,所述第十关节的转动轴线与所述第九关节的转动轴线相互垂直;
2.根据权利要求1所述的方法,其特征在于,相对于穿过所述窗口的中心点且相互垂直的两条轴线,所述窗口的横截面形状均为镜像对称;所述方法还包括:
3.根据权利要求2所述的方法,其特征在于,所述根据所述求解优化目标和所述求解约束条件,利用预设最优解算法确定所述第二关节、所述第三关节、所述第四关节、所述第六关节、所述第七关节和所述第八关节的中心点的求解位置包括:
4.根据权利要求3所述的方法,其特征在于,所述方法还包括:
5.根据权利要求3所述的方法,其特征在于,所述求解误差值的计算公式为:;其中,表示求解误差值;为所述第九关节的中心点和所述第十关节的中心点的求解位置的连线与x轴的夹角;为误差计算角度;
6.根据权利要求3所述的方法,其特征在于,所述根据所述九关节的中心点的求解位置,确定所述第八关节、所述第七关节和所述第六关节的中心点的计算初始位置包括:
7.根据权利要求6所述的方法,其特征在于,所述根据所述九关节的中心点的求解位置,确定所述第八关节、所述第七关节和所述第六关节的中心点的计算初始位置包括:
8.根据权利要求2所述的方法,其特征在于,所述窗口的横截面为方形,且所述窗口的横截面的两条边与z轴平行。
9.一种多关节机械臂的运动学逆解求解装置,其特征在于,所述多关节机械臂用于对托卡马克环流器进行维护作业;所述多关节机械臂包括通过连杆依次连接的第一关节、第二关节、第三关节、第四关节、第五关节、第六关节、第七关节、第八关节、第九关节和第十关节,其中,所述第一关节为直线移动关节,所述第二关节、所述第三关节、所述第四关节、所述第六关节、所述第七关节、所述第八关节和所述第九关节为转动关节,所述第五关节和所述第十关节为回转关节;所述第二关节、所述第三关节、所述第四关节的转动轴线相互平行,所述第五关节的转动轴线与所述第四关节的转动轴线相互垂直,所述第六关节的转动轴线与所述第五关节的转动轴线相互垂直,所述第七关节的转动轴线与所述第六关节的转动轴线相互垂直,所述第八关节的转动轴线与所述第七关节的转动轴线相互垂直,所述第九关节的转动轴线与所述第八关节的转动轴线相互垂直,所述第十关节的转动轴线与所述第九关节的转动轴线相互垂直;
10.根据权利要求9所述的装置,其特征在于,相对于穿过所述窗口的中心点且相互垂直的两条轴线,所述窗口的横截面形状均为镜像对称;所述装置还包括:
技术总结
本发明提供了一种多关节机械臂的运动学逆解求解方法及装置,本发明基于托卡马克环流器和多关节机械臂的结构,通过目标点的位置、托卡马克环流器的内壁形状和尺寸、第十关节的中心点的求解位置,确定第九关节的中心点的求解位置,进一步确定求解优化目标和求解约束条件,使用最优解算法确定多关节机械臂余下关节中心点的求解位置。故与现有技术相比,本发明的求解方法既可以实现快速求解,又可以保证求解结果的可靠性。
技术研发人员:王帮猛,张志远,宋定安,强利刚,姜通维,杨义光,肖陶康,任宏喜,王克楠,齐维伟
受保护的技术使用者:贵州航天控制技术有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!