一种面向狭小空间的绳驱动刚柔耦合机器人
本发明涉及一种面向狭小空间的绳驱动刚柔耦合机器人。
背景技术:
1、随着时代变迁,机器人与人类的生产生活实践越来越密不可分。它们往往在人类无法进入或有危险的地方代替人类进行作业。大到太空中的舱外机器人,小到人体内的手术机器人,这些机器人工作的环境都是人类开展活动异常困难的地方。
2、针对在这些狭小空间、复杂结构等环境中的作业,绳驱动柔性机器人代替人工就是一种很好的解决方法,其已广泛应用于运输、医疗、工业生产中,如专利号为202222243389.5的中国专利所示。因为此类型的机器人通常整体结构细长、柔顺,利于在狭小空间中工作。更重要的是绳驱动可以做到驱动模块与执行模块的分离,这为电机等精密仪器不在恶劣环境中工作提供了条件。
3、然而由于柔性机器人本身的限制,它无法做到像刚体机器人一样实现小角度的转弯,这使得它在特定的不够柔顺的狭小通孔空间中末端执行器无法灵活地开展工作。
技术实现思路
1、本发明的目的在于克服现有技术中存在的上述不足,而提供一种结构设计合理的面向狭小空间的绳驱动刚柔耦合机器人,并提高末端灵活性,在不够柔顺的狭小通孔空间中末端执行器可以灵活地开展工作。
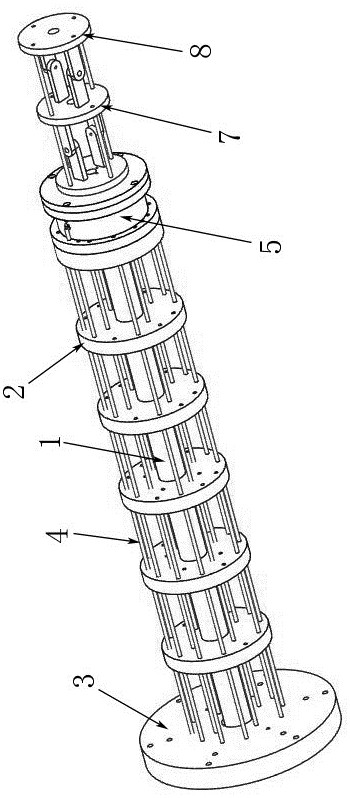
2、本发明解决上述问题所采用的技术方案是:一种面向狭小空间的绳驱动刚柔耦合机器人,包括柔性连续型关节;其特征在于:还包括刚性离散型关节;刚性离散型关节包括旋转关节、旋转关节驱动绳、第一转动关节、第二转动关节、第一转动关节驱动绳和第二转动关节驱动绳;旋转关节、第一转动关节、第二转动关节依次串联;旋转关节包括壳体、转子和转盘;壳体固定安装在柔性连续型关节的末端;转子转动安装在壳体上,转子的转轴与中间柔性杆的中心轴线平行;两条旋转关节驱动绳分别与转子固定,两条旋转关节驱动绳与转子的固定点分别位于转子的转轴的两侧;转盘转动设置在壳体上,并与转子连接;第一转动关节转动安装在转盘上,第一转动关节的转轴与转子的转轴垂直;第二转动关节转动安装在第一转动关节上,第二转动关节的转轴与转子的转轴垂直,且第二转动关节的转轴还与第一转动关节的转轴垂直;两条第一转动关节驱动绳分别与第一转动关节固定;两条第二转动关节驱动绳分别与第二转动关节固定。
3、本发明所述的柔性连续型关节包括中间柔性杆、导向盘、导向盘底座和柔性连续型关节驱动绳;中间柔性杆固定安装在导向盘底座上;导向盘固定安装在中间柔性杆上;导向盘为多个,依次安装在中间柔性杆上;柔性连续型关节驱动绳与导向盘连接。
4、本发明所述的导向盘等间隔依次安装在中间柔性杆上。
5、本发明所述的转子上开设有导槽,导槽环绕转子的转轴;导槽为两条,并排设置,两条旋转关节驱动绳分别绕在两条导槽上。
6、本发明所述的壳体上开设有壳体绳孔,两条旋转关节驱动绳分别从壳体绳孔伸入。
7、本发明所述的转子上开设有两个转子驱动绳固定孔,两个转子驱动绳固定孔分别位于两条导槽上,且分别位于转子的转轴的两侧。
8、本发明所述的两条第一转动关节驱动绳与第一转动关节的固定点分别位于第一转动关节的转轴的两侧。
9、本发明所述的两条第二转动关节驱动绳与第二转动关节的固定点分别位于第二转动关节的转轴的两侧。
10、本发明与现有技术相比,具有以下优点和效果:本发明根据现有面向狭小空间机器人存在的不足,通过采用刚柔耦合的思想设计面向狭小空间机器人的本身结构,在柔性连续型关节的设置了刚性离散型关节,刚柔耦合的设计使机器人在狭小空间中运动时具有更好的柔顺性,末端执行工作时具有更小的转弯半径,并且通过旋转转置具有旋转自由度,旋转自由度添加在末端的位置,使机器人末端具有更高的灵活性,可以适应多种复杂的工作环境,以提升机器人的整体使用性能。本发明可用于狭小空间、复杂结构环境的检测、维修等,比如航空发动机内部检修、微创手术、灾后救援等。
技术特征:
1.一种面向狭小空间的绳驱动刚柔耦合机器人,包括柔性连续型关节;其特征在于:还包括刚性离散型关节;刚性离散型关节包括旋转关节、旋转关节驱动绳、第一转动关节、第二转动关节、第一转动关节驱动绳和第二转动关节驱动绳;旋转关节、第一转动关节、第二转动关节依次串联;旋转关节包括壳体、转子和转盘;壳体固定安装在柔性连续型关节的末端;转子转动安装在壳体上,转子的转轴与中间柔性杆的中心轴线平行;两条旋转关节驱动绳分别与转子固定,两条旋转关节驱动绳与转子的固定点分别位于转子的转轴的两侧;转盘转动设置在壳体上,并与转子连接;第一转动关节转动安装在转盘上,第一转动关节的转轴与转子的转轴垂直;第二转动关节转动安装在第一转动关节上,第二转动关节的转轴与转子的转轴垂直,且第二转动关节的转轴还与第一转动关节的转轴垂直;两条第一转动关节驱动绳分别与第一转动关节固定;两条第二转动关节驱动绳分别与第二转动关节固定。
2.根据权利要求1所述的面向狭小空间的绳驱动刚柔耦合机器人,其特征在于:所述的柔性连续型关节包括中间柔性杆、导向盘、导向盘底座和柔性连续型关节驱动绳;中间柔性杆固定安装在导向盘底座上;导向盘固定安装在中间柔性杆上;导向盘为多个,依次安装在中间柔性杆上;柔性连续型关节驱动绳与导向盘连接。
3.根据权利要求2所述的面向狭小空间的绳驱动刚柔耦合机器人,其特征在于:所述的导向盘等间隔依次安装在中间柔性杆上。
4.根据权利要求1所述的面向狭小空间的绳驱动刚柔耦合机器人,其特征在于:所述的转子上开设有导槽,导槽环绕转子的转轴;导槽为两条,并排设置,两条旋转关节驱动绳分别绕在两条导槽上。
5.根据权利要求1所述的面向狭小空间的绳驱动刚柔耦合机器人,其特征在于:所述的壳体上开设有壳体绳孔,两条旋转关节驱动绳分别从壳体绳孔伸入。
6.根据权利要求4所述的面向狭小空间的绳驱动刚柔耦合机器人,其特征在于:所述的转子上开设有两个转子驱动绳固定孔,两个转子驱动绳固定孔分别位于两条导槽上,且分别位于转子的转轴的两侧。
7.根据权利要求1所述的面向狭小空间的绳驱动刚柔耦合机器人,其特征在于:所述的两条第一转动关节驱动绳与第一转动关节的固定点分别位于第一转动关节的转轴的两侧。
8.根据权利要求1所述的面向狭小空间的绳驱动刚柔耦合机器人,其特征在于:所述的两条第二转动关节驱动绳与第二转动关节的固定点分别位于第二转动关节的转轴的两侧。
技术总结
本发明提供一种面向狭小空间的绳驱动刚柔耦合机器人,末端灵活度高,在不够柔顺的狭小通孔空间中末端位置可以灵活的携带执行器开展工作。旋转关节、第一转动关节、第二转动关节依次串联;壳体固定安装在柔性连续型关节的末端;转子转动安装在壳体上,转子的转轴与中间柔性杆的中心轴线平行;两条旋转关节驱动绳分别与转子固定,两条旋转关节驱动绳与转子的固定点分别位于转子的转轴的两侧;转盘转动设置在壳体上,并与转子连接;第一转动关节转动安装在转盘上;第二转动关节转动安装在第一转动关节上;两条第一转动关节驱动绳分别与第一转动关节固定;两条第二转动关节驱动绳分别与第二转动关节固定。
技术研发人员:杨凯盛,许泽华,杨佳敏,卢一标,钱灿,杨桂林
受保护的技术使用者:宁波大学
技术研发日:
技术公布日:2024/1/5
- 还没有人留言评论。精彩留言会获得点赞!