实现力位混合柔顺控制的恒力浮动装置、控制系统及方法
本发明属于恒力浮动传感器,特别是实现力位混合柔顺控制的恒力浮动装置、控制系统及方法。
背景技术:
1、本部分的陈述仅仅是提供了与本发明相关的背景技术信息,不必然构成在先技术。
2、随着工业自动化的发展,恒力浮动装置在越来越多的场景中得到了应用。例如,随着太阳能发电的大面积普及,针对于太阳能板的清洁过程就需要进行恒力控制。由于太阳能板由于材料特殊,太阳能板在清洁过程中很容易碎裂,对于太阳能板清洁时很好的进行力量控制,从而需要使用恒力浮动器来对施加到太阳能板上的压力进行平衡。
3、发明人发现,目前市面上的恒力浮动器多数都是通过两个或多个气室来调节多个活动功能,而多个气室使得恒力浮动器的重量较重,长度偏大,从而使得打磨设备上的机械手在夹持恒力浮动器,增加了机械手的负载并降低了活动空间;同时由于太阳能板均安装在户外,所以还需配备单独气源设备,增加了使用时的难度,同时增加了清洁成本。
技术实现思路
1、本发明的目的在于提供实现力位混合柔顺控制的恒力浮动装置、控制系统及方法,其中恒力浮动装置为纯机械式结构,比气动浮动装置结构更简单、造价更低廉,并且重量轻、控制更简便,解决现有技术中的问题。
2、为解决上述技术问题,本发明是通过以下技术方案实现的:
3、本发明第一方面提供了实现力位混合柔顺控制的恒力浮动装置。
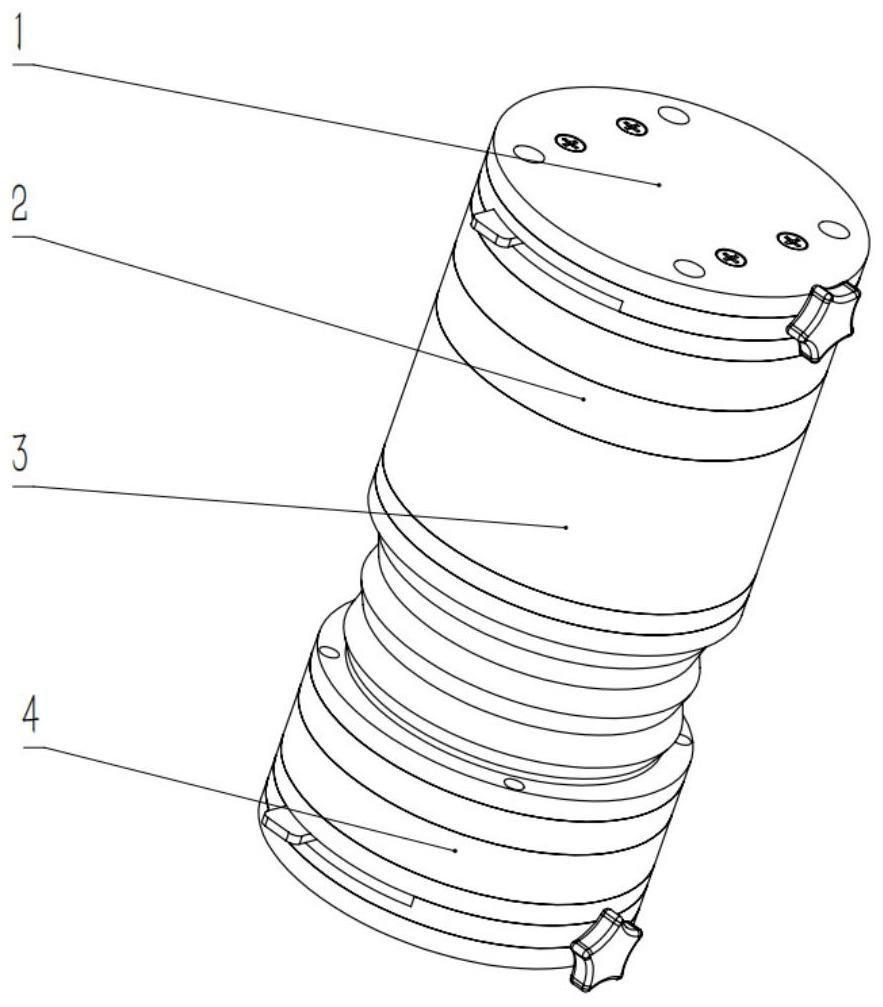
4、实现力位混合柔顺控制的恒力浮动装置,包括从上至下依次连接的法兰端快换机构、传感器机构、恒力浮动机构及末端快换机构,所述法兰端快换机构连接机械臂,末端快换机构连接执行末端;所述传感器机构内设置有力传感器,所述恒力浮动机构包括恒力浮动外壳,所述恒力浮动外壳底部设置有恒力弹簧和风琴管,所述风琴管内穿设有弹簧拉杆,所述恒力弹簧的一端与弹簧拉杆相连接,所述弹簧拉杆可相对于恒力浮动外壳上下移动;当所述末端快换机构受到压力时,弹簧拉杆沿受力方向移动,带动风琴管收缩,在恒力弹簧的作用下实现执行末端与接触物的恒力接触;当弹簧拉杆移动距离达到极限时,触发力传感器,进而触发机械臂运动,在机械臂和恒力弹簧的共同作用下实现执行末端与接触物处于恒力接触。
5、可选的,所述恒力浮动外壳和风琴管之间还设置有恒力弹簧固定板一,所述风琴管末端还设置有恒力浮动连接板,所述恒力弹簧可拆卸的设置于恒力弹簧固定板一上,所述弹簧拉杆设置于恒力浮动连接板上;所述恒力弹簧固定板一、恒力浮动外壳与弹簧拉杆相对应的位置分别设置有一号孔和二号孔,一号孔和二号孔的大小与弹簧拉杆相适配;所述恒力浮动连接板上还设置有多个导向柱,所述恒力弹簧固定板一上设置有多个导向孔,所述导向柱和导向孔一一对应设置。
6、可选的,所述传感器机构包括传感器安装板一、传感器安装板二、传感器安装板三,所述传感器安装板一和传感器安装板二组成容纳腔体,所述传感器安装板三设置于容纳腔体内部,所述传感器安装板三上设置有多个应变悬臂,所述应变悬臂顶部设置有力传导台,所述力传导台顶部设置有力传导板,所述力传导板朝向二号孔设置,所述应变悬臂上设有应变片。
7、可选的,所述法兰端快换机构和末端快换机构均包括由上至下依次设置的快换安装板一、快换安装板二、快换安装板三和快换安装板四,所述快换安装板三底部设置有齿轮,所述齿轮上安装有固定轴,所述快换安装板三中央设置有滑槽,所述滑槽内滑动连接有齿条,所述齿条和齿轮相啮合,所述齿条两侧分别设置有拨动块,所述拨动块延伸至快速安装板三的外部;所述拨动块上设置有导向凸台,所述快换安装板二上设置有导向槽,所述导向凸台和导向槽相互配合使用。
8、可选的,所述快换安装板四上设置有凹槽,所述凹槽内设置有锁止扣,所述锁止扣与固定轴配合使用,对固定轴进行限位。
9、可选的,所述快换安装板二和快换安装板一之间设置有快换固定螺栓,所述快换固定螺栓末端两侧分别设置有固定销,所述固定销上套设有小弹簧,所述固定销与导向凸台配合使用,对导向凸台的位置进行限位。
10、可选的,所述快换安装板二上还设置有拨动槽,所述拨动槽与拨动块相互配合使用。
11、可选的,所述快换安装板一和快换安装板二的对应位置分别设置有半圆形的一号螺纹槽和二号螺纹槽,所述一号螺纹槽和二号螺纹槽内螺纹连接有快换固定螺栓。
12、本发明第二方面提供了一种控制系统。
13、一种包含第一方面所述实现力位混合柔顺控制的恒力浮动装置的控制系统,包括机械臂、执行末端和控制器,所述机械臂和法兰端快换机构相连接,所述执行末端与末端快换机构相连接,所述控制器用于获取力传感器检测的压力数据和机械臂当前位置姿态数据,根据压力数据和机械臂当前位置姿态数据设计新的机械臂轨迹,使执行末端与接触物之间始终保持恒力接触。
14、本发明第三方面提供了一种控制方法。
15、一种基于第二方面所述控制系统的控制方法,包括以下步骤:
16、接收力传感器反馈的压力数据;
17、判压力数据是否为动态变化的数据,若是,则判断出执行末端受到外力,此时获取机械臂当前位置姿态数据;
18、基于压力数据和机械臂当前位置姿态数据设计新的机械臂轨迹,调整机械臂位置,使执行末端与接触物之间始终保持恒力接触。
19、本发明具有以下有益效果:
20、1、本发明提供了实现力位混合柔顺控制的恒力浮动装置、控制系统及方法,该快速更换的恒力浮动装置在两端均具有快速更换机构,在进行使用时可以快速的从机械臂上安装以及拆卸,对于末端工具也可以快速的安装以及拆卸。
21、2、该快速更换的恒力浮动装置为纯机械式结构的,比气动浮动装置结构更简单造价更低廉,并且重量轻,控制更简便。
22、3、该快速更换的恒力浮动装置行程大,在使用时拥有更大的浮动空间,可以大幅度简化机械臂的编程难度,提高工作效率。
23、4、该快速更换的恒力浮动传感器装置具有被动浮动和力传感主动浮动两种使用方式,当机械被动浮动方式行程达到极限时可以触发主动浮动方式,通过控制器调整机械臂的轨迹,使得机械臂工作更加安全。
24、当然,实施本发明的任一产品并不一定需要同时达到以上所述的所有优点。
技术特征:
1.实现力位混合柔顺控制的恒力浮动装置,其特征在于,包括从上至下依次连接的法兰端快换机构、传感器机构、恒力浮动机构及末端快换机构,所述法兰端快换机构连接机械臂,末端快换机构连接执行末端;所述传感器机构内设置有力传感器,所述恒力浮动机构包括恒力浮动外壳,所述恒力浮动外壳底部设置有恒力弹簧和风琴管,所述风琴管内穿设有弹簧拉杆,所述恒力弹簧的一端与弹簧拉杆相连接,所述弹簧拉杆可相对于恒力浮动外壳上下移动;当所述末端快换机构受到压力时,弹簧拉杆沿受力方向移动,带动风琴管收缩,在恒力弹簧的作用下实现执行末端与接触物的恒力接触;当弹簧拉杆移动距离达到极限时,触发力传感器,进而触发机械臂运动,在机械臂和恒力弹簧的共同作用下实现执行末端与接触物处于恒力接触。
2.根据权利要求1所述的实现力位混合柔顺控制的恒力浮动装置,其特征在于,所述恒力浮动外壳和风琴管之间还设置有恒力弹簧固定板一,所述风琴管末端还设置有恒力浮动连接板,所述恒力弹簧可拆卸的设置于恒力弹簧固定板一上,所述弹簧拉杆设置于恒力浮动连接板上;所述恒力弹簧固定板一、恒力浮动外壳与弹簧拉杆相对应的位置分别设置有一号孔和二号孔,一号孔和二号孔的大小与弹簧拉杆相适配;所述恒力浮动连接板上还设置有多个导向柱,所述恒力弹簧固定板一上设置有多个导向孔,所述导向柱和导向孔一一对应设置。
3.根据权利要求1所述的实现力位混合柔顺控制的恒力浮动装置,其特征在于,所述传感器机构包括传感器安装板一、传感器安装板二、传感器安装板三,所述传感器安装板一和传感器安装板二组成容纳腔体,所述传感器安装板三设置于容纳腔体内部,所述传感器安装板三上设置有多个应变悬臂,所述应变悬臂顶部设置有力传导台,所述力传导台顶部设置有力传导板,所述力传导板朝向二号孔设置,所述应变悬臂上设有应变片。
4.根据权利要求1所述的实现力位混合柔顺控制的恒力浮动装置,其特征在于,所述法兰端快换机构和末端快换机构均包括由上至下依次设置的快换安装板一、快换安装板二、快换安装板三和快换安装板四,所述快换安装板三底部设置有齿轮,所述齿轮上安装有固定轴,所述快换安装板三中央设置有滑槽,所述滑槽内滑动连接有齿条,所述齿条和齿轮相啮合,所述齿条两侧分别设置有拨动块,所述拨动块延伸至快速安装板三的外部;所述拨动块上设置有导向凸台,所述快换安装板二上设置有导向槽,所述导向凸台和导向槽相互配合使用。
5.根据权利要求4所述的实现力位混合柔顺控制的恒力浮动装置,其特征在于,所述快换安装板四上设置有凹槽,所述凹槽内设置有锁止扣,所述锁止扣与固定轴配合使用,对固定轴进行限位。
6.根据权利要求4所述的实现力位混合柔顺控制的恒力浮动装置,其特征在于,所述快换安装板二和快换安装板一之间设置有快换固定螺栓,所述快换固定螺栓末端两侧分别设置有固定销,所述固定销上套设有小弹簧,所述固定销与导向凸台配合使用,对导向凸台的位置进行限位。
7.根据权利要求4所述的实现力位混合柔顺控制的恒力浮动装置,其特征在于,所述快换安装板二上还设置有拨动槽,所述拨动槽与拨动块相互配合使用。
8.根据权利要求6所述的实现力位混合柔顺控制的恒力浮动装置,其特征在于,所述快换安装板一和快换安装板二的对应位置分别设置有半圆形的一号螺纹槽和二号螺纹槽,所述一号螺纹槽和二号螺纹槽内螺纹连接有快换固定螺栓。
9.一种包含权利要求1-8任一项所述实现力位混合柔顺控制的恒力浮动装置的控制系统,其特征在于,包括机械臂、执行末端和控制器,所述机械臂和法兰端快换机构相连接,所述执行末端与末端快换机构相连接,所述控制器用于获取力传感器检测的压力数据和机械臂当前位置姿态数据,根据压力数据和机械臂当前位置姿态数据设计新的机械臂轨迹,使执行末端与接触物之间始终保持恒力接触。
10.一种基于权利要求9所述控制系统的控制方法,其特征在于,包括以下步骤:
技术总结
本发明公开了实现力位混合柔顺控制的恒力浮动装置、控制系统及方法,涉及恒力浮动传感器技术领域。包括:法兰端快换机构与机械臂相连接,末端快换机构与执行末端相连接;传感器机构上设置有力传感器;恒力弹簧固定板一上设有恒力弹簧,恒力浮动连接板上设有弹簧拉杆,当所述末端快换机构受到压力时,弹簧拉杆沿受力方向移动,带动风琴管收缩,在恒力弹簧的作用下实现执行末端与接触物的恒力接触;当弹簧拉杆移动距离达到极限时,触发力传感器,进而触发机械臂运动,在机械臂和恒力弹簧的共同作用下实现执行末端与接触物处于恒力接触。本发明恒力浮动装置为纯机械式结构,比气动浮动装置结构更简单、造价更低廉,并且重量轻、控制更简便。
技术研发人员:宋锐,王艳红,刘财龙,李晨晨,王超群,郑玉坤
受保护的技术使用者:山东大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!