一种用于深井救援的气动柔性机械手
本发明涉及井下辅助装置,具体涉及一种用于深井救援的气动柔性机械手。
背景技术:
1、在矿场等一些工业生产区域,作业人员由于疏忽大意出现落井情况,需要进行深井救援。然而由于救援人员体型、深井口径、地质等条件限制,使得救援过程耗费大量的人力、物力和财力,因此多类型的救援设备逐渐取代人力救援。然而这种救援装置,其安装所需时间较长,使得救援的黄金时间被耽误,被救援者生还率低,并且在救援过程中容易对坠井人员造成二次伤害。
2、现有的救援装置大多为机械提升结构,通过机械传动的方式,拉动井下人员至地面,如cn202011182561.x一种深井快速救援装置。然而井下的环境较为复杂,不清楚是否存在可燃气体,因此在进行救援时需要面对防爆的问题,通常采用液压驱动或气压驱动来执行提升救援。然而,井下的情况较为复杂,井道存在一定的弯曲,倾斜的情况,然而这类提升装置无法改变自身的结构状态,无法适配于不同井下情况;同时,此类装置无法控制端部的角度和位置,导致无法到达救援面,影响救援效率。
技术实现思路
1、为解决井下整体姿态适配的技术问题,本发明提供一种用于深井救援的气动柔性机械手。本发明提供了如下的技术方案。
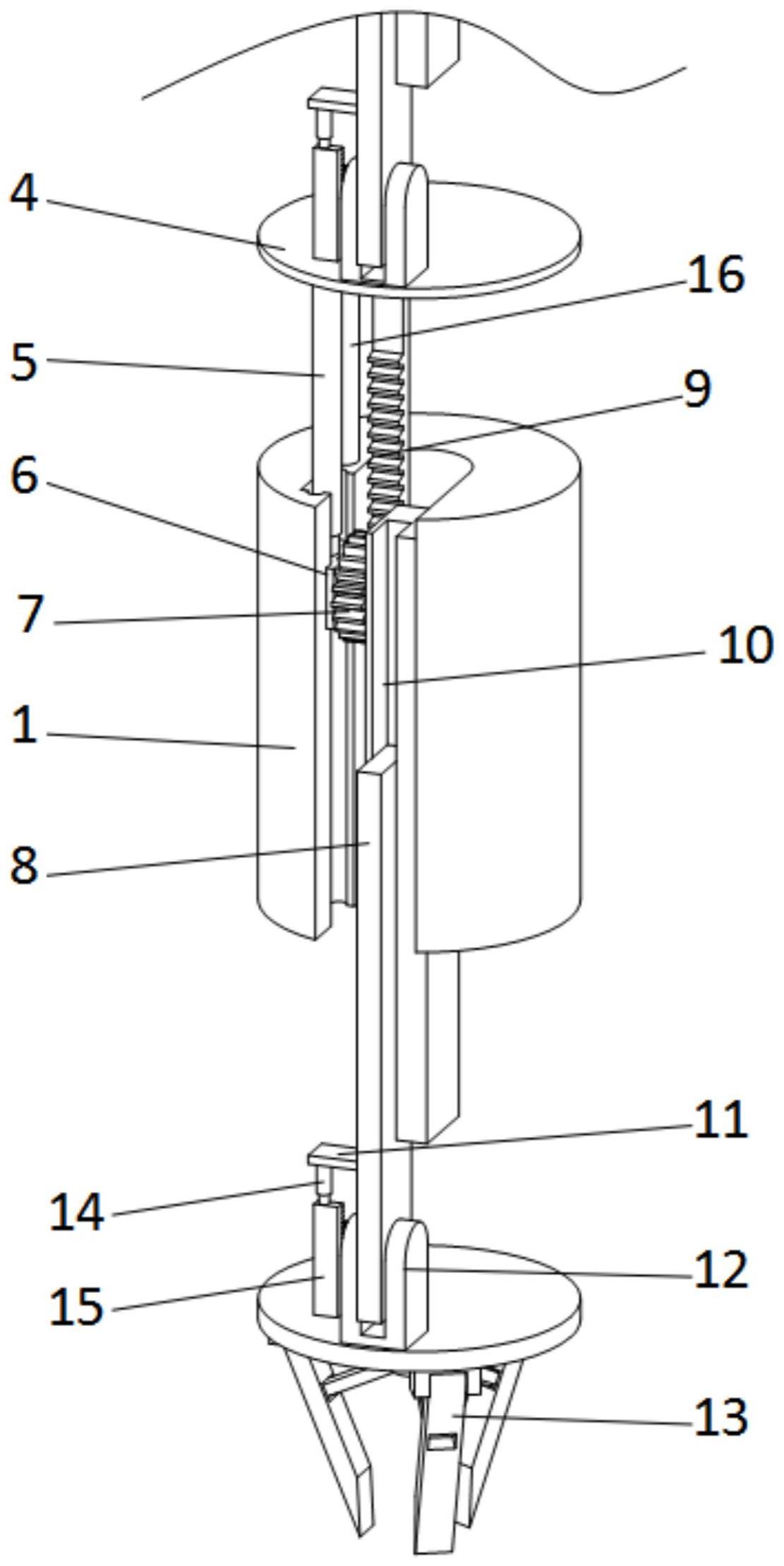
2、一种用于深井救援的气动柔性机械手,包括依次连接的多个控制臂,以及与末端的控制臂连接的执行机械爪;所述控制臂包括:
3、固定板;
4、伸缩臂,包括第一伸缩组件和固定臂;所述第一伸缩组件与所述固定板的底部固定连接,其伸缩端转动设置有第一转轴,所述第一转轴与所述固定臂的一端固定连接;
5、第一转动部,包括第一齿条、第二伸缩组件和固定设置在第一转轴上的第一齿轮;所述第二伸缩组件固定设置在所述固定板的底部,驱动所述第一齿条移动;所述第一齿条移动至某一位置时与所述第一齿轮啮合,通过第一伸缩组件改变固定臂的角度;
6、第二转动部,包括第二齿条、第三伸缩组件和转动关节;所述转动关节固定设置在相邻的所述控制臂的固定板顶部;所述固定臂的另一端通过第二转轴与所述转动关节转动连接;所述转动关节的一侧固定设置有第二齿轮;所述第三伸缩组件架设在所述固定臂的一侧,其伸缩端与所述第二齿条一端连接,第二齿条与第二齿轮啮合,驱动第二齿轮转动,改变相邻的所述控制臂的固定板的角度。
7、优选地,还包括:
8、控制部,与所述固定板的底部固定连接;所述控制部具有沿长度方向贯穿的滑动槽;所述固定臂的与所述滑动槽的一侧壁抵接;所述滑动槽的另一侧壁沿滑动槽的长度方向开设有限位槽;
9、移动块,滑动设置在所述限位槽内;所述第一伸缩组件的伸缩端与所述移动块固定连接;所述第一转轴与所述移动块转动连接。
10、优选地,所述第一伸缩组件包括:
11、第一气缸,固定设置在所述固定板的底部,其伸缩端与所述移动块固定连接。
12、优选地,所述第二伸缩组件包括:
13、安装板,固定设置在所述固定板的底部;
14、第二气缸,固定安装板一端面,其伸缩端与所述第一齿条的端部一侧固定连接;其中,所述第二气缸伸展时推动所述第一齿条与所述第一齿轮啮合,在所述第一气缸伸展驱动第一齿轮移动,进而改变所述固定臂的角度。
15、优选地,所述固定臂包括调节槽和滑动设置在所述调节槽槽内的调节板;所述调节板通过销轴在所述调节槽内限位;所述调节槽的一侧与所述第一转轴固定连接;所述调节板的末端与转动关节转动连接。
16、优选地,所述第三伸缩组件包括:
17、架板,固定设置在所述调节板的一侧;
18、第三气缸,固定设置在所述架板上,其伸缩端与所述第二齿条的一端固定连接。
19、优选地,所述执行机械爪包括:
20、第四气缸,固定设置在所述固定板的底部;
21、推板,与所述第四气缸的伸缩端固定连接;
22、三个夹爪板,沿所述第四气缸周向设置;每个所述夹爪板的一端均与所述固定板转动连接;
23、三个连杆;每个所述连杆的一端与所述夹爪板的中部固定连接,另一端与所述推板转动连接。
24、优选地,末端的所述控制臂连接有救援腰带。
25、本发明有益效果:
26、本发明提出一种用于深井救援的气动柔性机械手,该机械手采用全气动结构,避免因电气元件对救援造成影响。该机械手通过两个转动副和两个移动副实现了井下多位置调节目的,采用齿轮齿条的变角结构,配合伸缩气缸的直线移动结构,能够灵活的构建多姿态、多关节的机械手状态,解决了井下救援时,各类环境下的柔性机械手多角度姿态适配的问题,同时该机械手端部的位置可控,能够更为精准的达到救援面,通过搭载不同类型的救援设备,快速实现救援。
技术特征:
1.一种用于深井救援的气动柔性机械手,其特征在于,包括依次连接的多个控制臂,以及与末端的控制臂连接的执行机械爪;所述控制臂包括:
2.根据权利要求1所述的用于深井救援的气动柔性机械手,其特征在于,还包括:
3.根据权利要求2所述的用于深井救援的气动柔性机械手,其特征在于,所述第一伸缩组件包括:
4.根据权利要求3所述的用于深井救援的气动柔性机械手,其特征在于,所述第二伸缩组件包括:
5.根据权利要求1所述的用于深井救援的气动柔性机械手,其特征在于,所述固定臂包括调节槽(10)和滑动设置在所述调节槽(10)槽内的调节板(8);所述调节板(8)通过销轴在所述调节槽(10)内限位;所述调节槽(10)的一侧与所述第一转轴固定连接;所述调节板(8)的末端与转动关节(12)转动连接。
6.根据权利要求5所述的用于深井救援的气动柔性机械手,其特征在于,所述第三伸缩组件包括:
7.根据权利要求1所述的用于深井救援的气动柔性机械手,其特征在于,所述执行机械爪包括:
8.根据权利要求1所述的用于深井救援的气动柔性机械手,其特征在于,末端的所述控制臂连接有救援腰带。
技术总结
本发明提供一种用于深井救援的气动柔性机械手,包括多个控制臂,控制臂包括固定板、伸缩臂、第一转动部和第二转动部。伸缩臂包括第一伸缩组件和固定臂;第一伸缩组件的伸缩端转动设置有与固定臂的一端固定连接第一转轴;第一转动部包括第一齿条、第二伸缩组件和固定在第一转轴上的第一齿轮;第二伸缩组件驱动第一齿条移动;第二转动部包括第二齿条、第三伸缩组件和转动关节;转动关节固定设置在相邻的控制臂的固定板顶部;固定臂的另一端与转动关节转动连接;转动关节的一侧固定设置有第二齿轮;第三伸缩组件的伸缩端与第二齿条一端连接,第二齿条与第二齿轮啮合。该机械手整体采用气动执行,能够根据井下的救援环境进行长度和角度的适应性调整。
技术研发人员:范国敏,范国增,蒋蓉
受保护的技术使用者:华北科技学院(中国煤矿安全技术培训中心)
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!