一种多机器人智能协同仿真训练系统的制作方法
本发明属于机器人,涉及一种多机器人智能协同仿真训练系统。
背景技术:
1、多机器人协同是指多个机器人互相协作,以完成一些复杂的任务。多机器人系统具备两个或多个机器人,在加工制造中相比于单机器人工作站和传统加工设备具有明显的优势,其具有较高的可扩展性与灵活性,能有效涵盖更大的加工范围,提高加工的精度和效率。多机器人的协同工作增加了运动干涉范围,通过人工智能算法调度机器人可以优化运动轨迹和作业时序,提高作业效率的同时避免发生干涉。
技术实现思路
1、有鉴于此,本发明的目的在于提供一种多机器人智能协同仿真训练系统。
2、为达到上述目的,本发明提供如下技术方案:
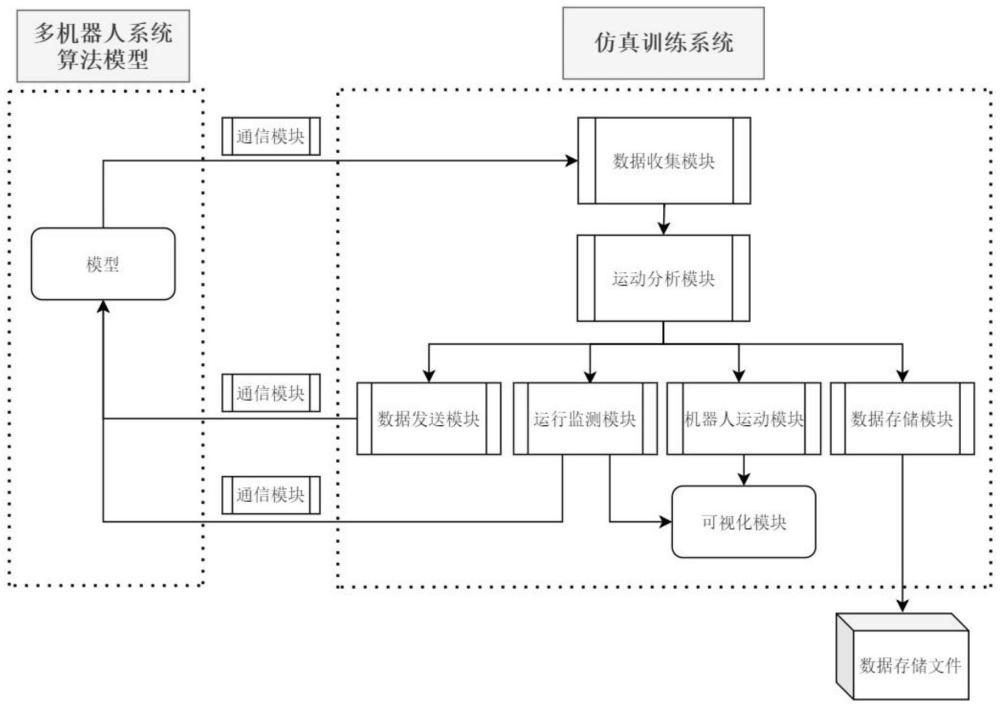
3、一种多机器人智能协同仿真训练系统,该系统包括通讯模块、数据收集模块、运动分析模块、数据发送模块、机器人运动模块、运行监测模块、可视化模块和数据存储模块;
4、所述数据收集模块将数据发送至运动分析模块;
5、所述运动分析模块将分析结果分别发送至数据发送模块、运行监测模块、机器人运动模块和数据存储模块;
6、运动分析模块将收集的点位数据分配给不同的机器人,并根据点位数据在软件中创建机器人运动路径,由软件分析该运动路径过程中机器人的关节变化情况;
7、所述数据发送模块通过通信模块将分析结果传送至多机器人系统算法模型,计算后再通过通信模块传送至数据收集模块;
8、所述运行监测模块通过通信模块将监测到的数据传送至多机器人系统算法模型,同时将监测到的数据传送至可视化模块进行展示;所述运行监测模块用于监测机器人关节、工具和外部轴的三维模型运动过程中产生的碰撞及报警;
9、所述机器人运动模块通过可视化模块进行展示;所述机器人运动模块用于负责机器人关节、工具和外部轴的三维模型运动;
10、所述数据存储模块将分析结果以数据存储文件的形式进行存储,并对数据以时序进行存储,存储的数据以数据标签进行识别、分类。
11、可选的,所述多机器人系统算法模型接收数据并运用机器人正、逆运动学解分析处理数据,将处理后的数据反馈给多机器人系统算法模型,并以时序存储原数据及处理后的数据。
12、可选的,所述数据收集模块将接收的数据附上数据标签。
13、可选的,所述数据标签包括机器人型号、机器人功能描述和机器人识别id。
14、本发明的有益效果在于:本发明利用多机器人系统算法模型和仿真技术,训练多机器人系统的协同作业算法模型,并通过仿真训练平台与模型实时交互进行路径规划,实现多机器人智能协同作业路径的高效规划,提高机器人加工非标工作站部署的效率。
15、本发明的其他优点、目标和特征在某种程度上将在随后的说明书中进行阐述,并且在某种程度上,基于对下文的考察研究对本领域技术人员而言将是显而易见的,或者可以从本发明的实践中得到教导。本发明的目标和其他优点可以通过下面的说明书来实现和获得。
技术特征:
1.一种多机器人智能协同仿真训练系统,其特征在于:该系统包括通讯模块、数据收集模块、运动分析模块、数据发送模块、机器人运动模块、运行监测模块、可视化模块和数据存储模块;
2.根据权利要求1所述的一种多机器人智能协同仿真训练系统,其特征在于:所述多机器人系统算法模型接收数据并运用机器人正、逆运动学解分析处理数据,将处理后的数据反馈给多机器人系统算法模型,并以时序存储原数据及处理后的数据。
3.根据权利要求1所述的一种多机器人智能协同仿真训练系统,其特征在于:所述数据收集模块将接收的数据附上数据标签。
4.根据权利要求3所述的一种多机器人智能协同仿真训练系统,其特征在于:所述数据标签包括机器人型号、机器人功能描述和机器人识别id。
技术总结
本发明涉及一种多机器人智能协同仿真训练系统,属于机器人技术领域。该系统利用多机器人系统算法模型和仿真技术,训练多机器人系统的协同作业算法模型,并通过仿真训练平台与模型实时交互进行路径规划,实现多机器人智能协同作业路径的高效规划。该平台提高了多机器人协同作业路径规划效率,实现了持续优化的基于模型驱动的仿真,为多机器人协同作业的路径规划提供了有效的解决方案。
技术研发人员:王玮,万小丽,谭云龙
受保护的技术使用者:中冶赛迪技术研究中心有限公司
技术研发日:
技术公布日:2024/1/22
- 还没有人留言评论。精彩留言会获得点赞!