一种载带机胶盘抓取机械手的制作方法
本发明涉及机械手,具体是一种载带机胶盘抓取机械手。
背景技术:
1、全自动载带成型机设备主要生产12-88毫米宽的电子带,每小时稳定生产速度300米,如ps/pc/pvc及传导性或非传导性材料。收带装置可收直径达1米多的超大胶盘。
2、由于胶盘较大,因此在加工或者安装时需要通过机械手进行辅助转移的处理,但是现有的机械手每次只能实现单个胶盘的夹取,导致整体的效率较低,因此需要对其进行改进。
技术实现思路
1、本发明提供一种载带机胶盘抓取机械手,解决了上述背景技术中提出的问题。
2、为实现上述目的,本发明提供如下技术方案:
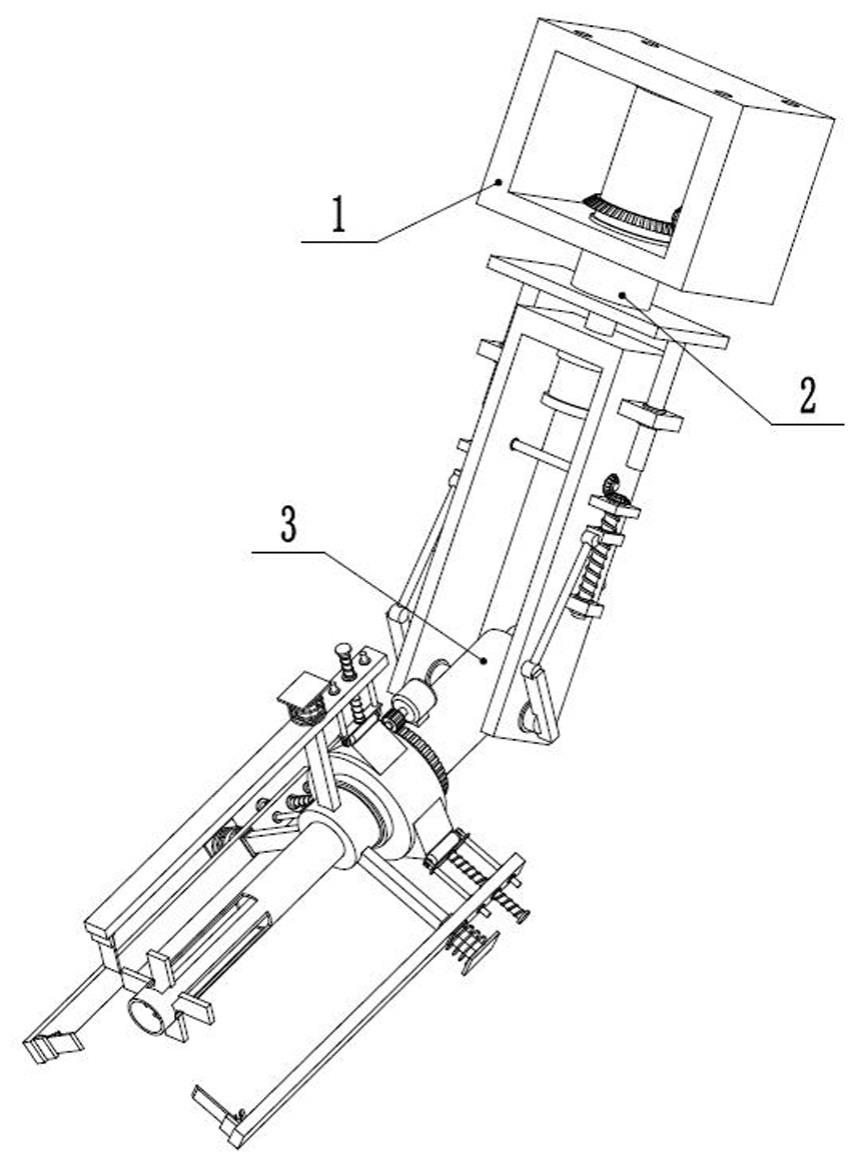
3、一种载带机胶盘抓取机械手,包括固定框、悬挂机构和夹持机构;
4、悬挂机构,包括与固定框转动连接的主轴,主轴的端部固定连接安装板,安装板的两端设置有导向杆,导向杆的中部滑动连接导向块,导向块固定连接支撑框;
5、夹持机构,包括与支撑框端部转动连接的转轴,转轴的中部固定连接套筒,套筒远离转轴的一侧外沿设置有立柱,立柱的中部滑动连接有夹持杆,所述套筒的外侧设置有调节夹持杆与套筒间距的间距调节组件,所述套筒的中部设置有限位杆。
6、作为本发明的一种优选技术方案,所述固定框的内壁设置有第一驱动电机,第一驱动电机的输出轴固定连接第一锥齿轮,第一锥齿轮啮合连接第二锥齿轮,第二锥齿轮固定连接主轴,所述支撑框的内部设置有顶升气缸,顶升气缸的活塞杆固定连接安装板。
7、作为本发明的一种优选技术方案,所述支撑框的外侧设置有调节转轴角度的偏转驱动组件,所述限位杆的内部设置有调节套筒重心位置的配重自调节组件,夹持杆的端部设置有限制胶盘移动方向的单向进料组件。
8、作为本发明的一种优选技术方案,所述偏转驱动组件包括设置于支撑框外侧的轴承座,轴承座转动连接顶升丝杆的两侧,顶升丝杆的中部螺纹连接推块,推块的外侧转动连接支撑杆的一端,支撑杆的另一端转动连接偏转板的一端,偏转板的另一端固定连接转轴的端部。
9、作为本发明的一种优选技术方案,所述支撑框的两侧均设置有顶升丝杆,支撑框远离转轴的一侧转动连接有传动轴,传动轴的两端设置有第五锥齿轮,第五锥齿轮啮合连接第六锥齿轮,第六锥齿轮固定连接顶升丝杆的端部,所述支撑框的内壁设置有第二驱动电机,第二驱动电机的输出轴固定连接第三锥齿轮,第三锥齿轮啮合连接第四锥齿轮,第四锥齿轮固定连接传动轴。
10、作为本发明的一种优选技术方案,所述限位杆为中空结构,所述配重自调节组件包括设置于限位杆远离转轴一侧的滑槽,滑槽滑动连接有顶板,所述顶板固定连接有与限位杆滑动连接的顶杆,顶杆远离顶板的一侧设置有配重砝码。
11、作为本发明的一种优选技术方案,所述顶杆远离顶板的一端设置有挡环,挡环上设置有螺柱,螺柱的中部套设有配重砝码,螺柱端部螺纹连接有与配重砝码配合的锁紧螺母。
12、作为本发明的一种优选技术方案,所述单向进料组件包括垂直设置于夹持杆远离套筒一端的挡板,挡板靠近夹持杆的一侧转动连接有与挡板配合的托板,所述夹持杆上设置有固定座,固定座与托板之间设置有复位弹簧。
13、作为本发明的一种优选技术方案,所述间距调节组件包括设置于立柱端部的限位板,限位板与夹持杆之间设置有夹持弹簧,所述套筒的外部转动连接有旋转套,旋转套的外侧设置有顶升凸起,所述夹持杆靠近套筒的一侧螺纹连接有调节丝杆,调节丝杆靠近套筒的一端转动连接有安装架,安装架转动连接有与顶升凸起配合的顶轮。
14、作为本发明的一种优选技术方案,所述套筒的外侧设置有第三驱动电机,第三驱动电机的输出轴固定连接主动齿轮,主动齿轮啮合连接有固定在旋转套外部的从动齿圈。
15、本发明具有以下有益之处:
16、本发明适用于一种载带机胶盘抓取机械手,通过限位杆和夹持杆的配合使得机械手可以同时夹取多个胶盘,从而提高了工作效率,并且通过悬挂机构使得机械手可以对于不同角度和方向的胶盘进行装夹处理。
技术特征:
1.一种载带机胶盘抓取机械手,其特征在于,包括固定框、悬挂机构和夹持机构;
2.根据权利要求1所述的一种载带机胶盘抓取机械手,其特征在于,所述固定框的内壁设置有第一驱动电机,第一驱动电机的输出轴固定连接第一锥齿轮,第一锥齿轮啮合连接第二锥齿轮,第二锥齿轮固定连接主轴,所述支撑框的内部设置有顶升气缸,顶升气缸的活塞杆固定连接安装板。
3.根据权利要求1所述的一种载带机胶盘抓取机械手,其特征在于,所述支撑框的外侧设置有调节转轴角度的偏转驱动组件,所述限位杆的内部设置有调节套筒重心位置的配重自调节组件,夹持杆的端部设置有限制胶盘移动方向的单向进料组件。
4.根据权利要求3所述的一种载带机胶盘抓取机械手,其特征在于,所述偏转驱动组件包括设置于支撑框外侧的轴承座,轴承座转动连接顶升丝杆的两侧,顶升丝杆的中部螺纹连接推块,推块的外侧转动连接支撑杆的一端,支撑杆的另一端转动连接偏转板的一端,偏转板的另一端固定连接转轴的端部。
5.根据权利要求4所述的一种载带机胶盘抓取机械手,其特征在于,所述支撑框的两侧均设置有顶升丝杆,支撑框远离转轴的一侧转动连接有传动轴,传动轴的两端设置有第五锥齿轮,第五锥齿轮啮合连接第六锥齿轮,第六锥齿轮固定连接顶升丝杆的端部,所述支撑框的内壁设置有第二驱动电机,第二驱动电机的输出轴固定连接第三锥齿轮,第三锥齿轮啮合连接第四锥齿轮,第四锥齿轮固定连接传动轴。
6.根据权利要求3所述的一种载带机胶盘抓取机械手,其特征在于,所述限位杆为中空结构,所述配重自调节组件包括设置于限位杆远离转轴一侧的滑槽,滑槽滑动连接有顶板,所述顶板固定连接有与限位杆滑动连接的顶杆,顶杆远离顶板的一侧设置有配重砝码。
7.根据权利要求6所述的一种载带机胶盘抓取机械手,其特征在于,所述顶杆远离顶板的一端设置有挡环,挡环上设置有螺柱,螺柱的中部套设有配重砝码,螺柱端部螺纹连接有与配重砝码配合的锁紧螺母。
8.根据权利要求3所述的一种载带机胶盘抓取机械手,其特征在于,所述单向进料组件包括垂直设置于夹持杆远离套筒一端的挡板,挡板靠近夹持杆的一侧转动连接有与挡板配合的托板,所述夹持杆上设置有固定座,固定座与托板之间设置有复位弹簧。
9.根据权利要求1所述的一种载带机胶盘抓取机械手,其特征在于,所述间距调节组件包括设置于立柱端部的限位板,限位板与夹持杆之间设置有夹持弹簧,所述套筒的外部转动连接有旋转套,旋转套的外侧设置有顶升凸起,所述夹持杆靠近套筒的一侧螺纹连接有调节丝杆,调节丝杆靠近套筒的一端转动连接有安装架,安装架转动连接有与顶升凸起配合的顶轮。
10.根据权利要求9所述的一种载带机胶盘抓取机械手,其特征在于,所述套筒的外侧设置有第三驱动电机,第三驱动电机的输出轴固定连接主动齿轮,主动齿轮啮合连接有固定在旋转套外部的从动齿圈。
技术总结
本发明涉及机械手技术领域,公开了一种载带机胶盘抓取机械手,包括固定框、悬挂机构和夹持机构;悬挂机构,包括与固定框转动连接的主轴,主轴的端部固定连接安装板,安装板的两端设置有导向杆,导向杆的中部滑动连接导向块,导向块固定连接支撑框;夹持机构,包括与支撑框端部转动连接的转轴,转轴的中部固定连接套筒,套筒远离转轴的一侧外沿设置有立柱,立柱的中部滑动连接有夹持杆,所述套筒的外侧设置有调节夹持杆与套筒间距的间距调节组件,所述套筒的中部设置有限位杆。本发明适用于一种载带机胶盘抓取机械手,通过限位杆和夹持杆的配合使得机械手可以同时夹取多个胶盘,从而提高了工作效率。
技术研发人员:陈银霞
受保护的技术使用者:深圳市科扬自动化设备制造有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!