一种切割机器人刀盘控制方法和装置、电子设备与流程
本发明涉及智能硬件,尤其涉及一种切割机器人刀盘控制方法和装置、电子设备。
背景技术:
1、智能割草机器人可自动在作业区域内完成割草任务,但是在执行任务过程中或者执行任务前存在回充的需求。然而目前大部分智能割草机器人切割电机的高度是通过手动的方式调节,如果切割电机将刀盘的高度调节的比较低,智能机器人回归过程中刀盘甚至切割电机可能会碰到障碍物,导致智能割草机器卡困,回归失败无法成功回充。此时则需要用户手动操作,主动恢复智能割草机器人的异常状态,用户体验较差。
技术实现思路
1、本发明实施例的目的是提供一种切割机器人刀盘控制方法和装置、电子设备,能够解决现有技术中存在的异物损伤切割机器人刀盘甚至切割电机的问题。
2、为解决上述技术问题,本发明提供如下技术方案:
3、本发明实施例提供了一种切割机器人刀盘控制方法,其中,该方法包括:
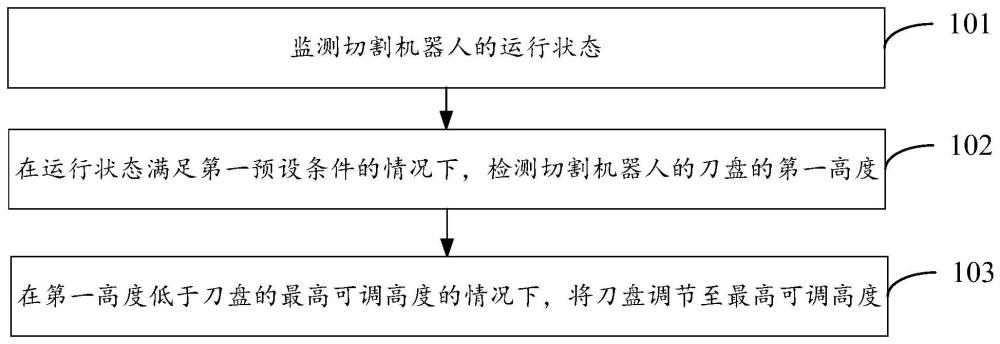
4、监测切割机器人的运行状态;
5、在所述运行状态满足第一预设条件的情况下,检测所述切割机器人的刀盘的第一高度;
6、在所述第一高度低于所述刀盘的最高可调高度的情况下,将所述刀盘调节至所述最高可调高度。
7、可选地,在将所述刀盘调节至所述最高可调高度的步骤之后,所述方法还包括:
8、在监测到所述切割机器人的运行状态满足第二预设条件的情况下,将所述刀盘的高度调节至所述第一高度。
9、可选地,在所述运行状态满足第一预设条件的情况下,检测所述切割机器人的刀盘的第一高度的步骤,包括:
10、在所述切割机器人满足回充条件的情况下,确定所述切割机器人的运行状态满足第一预设条件,检测所述切割机器人的刀盘的第一高度;
11、或者,
12、在所述切割机器人沿待作业区域边界线建图时,确定所述切割机器人的运行状态满足第一预设条件,检测所述切割机器人的刀盘的第一高度。
13、可选地,所述切割机器人满足回充条件包括以下至少之一:
14、所述切割机器人电池的剩余电量小于预设电量;
15、所述切割机器人的雨淋传感器的检测结果为下雨;
16、所述切割机器人接收到对人机界面中回充选项的选择操作;
17、所述切割机器人接收到配对的移动终端发送的回充指令。
18、可选地,在监测到所述切割机器人的运行状态满足第二预设条件的情况下,将所述刀盘的高度调节至所述第一高度的步骤包括:
19、在监测到所述切割机器人返回第一位置的情况下,将所述刀盘的高度调节至所述第一高度,其中,所述第一位置为所述切割机器人确定满足回充条件时刻所处的位置。
20、可选地,在所述第一高度低于所述刀盘的最高可调高度的情况下,将所述刀盘调节至所述最高可调高度的步骤包括:
21、在所述第一高度低于所述刀盘的最高可调高度的情况下,所述切割机器人上的调高电机控制所述刀盘调整至最高挡位,以将所述刀盘调节至所述最高可调高度。
22、本发明实施例提供了一种切割机器人刀盘控制装置,其中,所述装置包括:
23、监测模块,用于监测切割机器人的运行状态;
24、检测模块,用于在所述运行状态满足第一预设条件的情况下,检测所述切割机器人的刀盘的第一高度;
25、第一调节模块,用于在所述第一高度低于所述刀盘的最高可调高度的情况下,将所述刀盘调节至所述最高可调高度。
26、可选地,所述装置还包括:
27、第二调节模块,用于在所述第一调节模块将所述刀盘调节至所述最高可调高度之后,在监测到所述切割机器人的运行状态满足第二预设条件的情况下,将所述刀盘的高度调节至所述第一高度。
28、可选地,所述检测模块具体用于:
29、在所述切割机器人满足回充条件的情况下,确定所述切割机器人的运行状态满足第一预设条件,检测所述切割机器人的刀盘的第一高度;
30、或者,
31、在所述切割机器人沿待作业区域边界线建图时,确定所述切割机器人的运行状态满足第一预设条件,检测所述切割机器人的刀盘的第一高度。
32、可选地,所述切割机器人满足回充条件包括以下至少之一:
33、所述切割机器人电池的剩余电量小于预设电量;
34、所述切割机器人的雨淋传感器的检测结果为下雨;
35、所述切割机器人接收到对人机界面中回充选项的选择操作;
36、所述切割机器人接收到配对的移动终端发送的回充指令。
37、可选地,所述第二调节模块具体用于:
38、在监测到所述切割机器人返回第一位置的情况下,将所述刀盘的高度调节至所述第一高度,其中,所述第一位置为所述切割机器人确定满足回充条件时刻所处的位置。
39、可选地,所述第一调节模块具体用于:在所述第一高度低于所述刀盘的最高可调高度的情况下,触发所述切割机器人上的调高电机控制所述刀盘调整至最高挡位,以将所述刀盘调节至所述最高可调高度。
40、本发明实施例提供了一种电子设备,该电子设备包括处理器、存储器及存储在所述存储器上并可在所述处理器上运行的程序或指令,所述程序或指令被所述处理器执行时实现上述任意一种切割机器人刀盘控制方法的步骤。
41、本发明实施例提供了一种可读存储介质,所述可读存储介质上存储程序或指令,所述程序或指令被处理器执行时实现上述任意一种切割机器人刀盘控制方法的步骤。
42、本发明实施例提供的切割机器人刀盘控制方案,监测切割机器人的运行状态;在运行状态满足第一预设条件的情况下,检测切割机器人的刀盘的第一高度;在第一高度低于刀盘的最高可调高度的情况下,将刀盘调节至最高可调高度。本发明实施例提供的切割器人刀盘控制方案,检测到切割机器人的运行状态满足第一预设条件如切割机器人在建图和回充时,如果刀盘在较低位置,切割机器人将刀盘调到最高位置,从而避免切割机器人回归过程中刀盘甚至切割电机碰到障碍物,发生切割机器人卡困的情况。
技术特征:
1.一种切割机器人刀盘控制方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,在将所述刀盘调节至所述最高可调高度的步骤之后,所述方法还包括:
3.根据权利要求1所述的方法,其特征在于,在所述运行状态满足第一预设条件的情况下,检测所述切割机器人的刀盘的第一高度的步骤,包括:
4.根据权利要求1所述的方法,其特征在于,所述切割机器人满足回充条件包括以下至少之一:
5.根据权利要求2所述的方法,其特征在于,在监测到所述切割机器人的运行状态满足第二预设条件的情况下,将所述刀盘的高度调节至所述第一高度的步骤包括:
6.根据权利要求1所述的方法,其特征在于,在所述第一高度低于所述刀盘的最高可调高度的情况下,将所述刀盘调节至所述最高可调高度的步骤包括:
7.一种切割机器人刀盘控制装置,其特征在于,包括:
8.根据权利要求7所述的装置,其特征在于,所述装置还包括:
9.根据权利要求7所述的装置,其特征在于,所述检测模块具体用于:
10.一种电子设备,其特征在于,所述电子设备包括处理器、存储器及存储在所述存储器上并可在所述处理器上运行的程序或指令,所述程序或指令被所述处理器执行所述权利要求1-6中任意一种切割机器人刀盘控制方法的步骤。
技术总结
本发明公开了一种切割机器人刀盘控制方案,属于智能硬件技术领域,所述方法包括:监测切割机器人的运行状态;在所述运行状态满足第一预设条件的情况下,检测所述切割机器人的刀盘的第一高度;在所述第一高度低于所述刀盘的最高可调高度的情况下,将所述刀盘调节至所述最高可调高度。本申请提供的切割机器人刀盘控制方案,能够提升切割机器人建图、回充过程中刀盘的安全性,避免切割器人回充运行过程中卡困。
技术研发人员:王彬
受保护的技术使用者:江苏东成机电工具有限公司
技术研发日:
技术公布日:2024/1/25
- 还没有人留言评论。精彩留言会获得点赞!