单电机控制双独立轴的连续体机械臂线缆驱动装置及方法
本发明属于齿轮传动机械设计与控制领域,具体涉及一种单电机控制双独立轴的连续体机械臂线缆驱动装置及方法。
背景技术:
1、在当前的技术发展中,随着机械制造精度和复杂度的不断提升,我们面临着一个普遍存在的问题,即机械系统中虽然具备多个执行机构,但只有单一的动力源。这个问题已经成为制造业和工程领域中频繁出现的挑战。目前,为了解决这个问题,人们采用了多种方法,其中主要包括气动和液压式动力源,而直接采用电机控制的方法相对较少,且实现多轴独立控制的方法也很有限。
2、气动和液压系统在一些特定的应用中表现出了良好的性能。气动系统利用压缩空气作为动力源,通过控制气压来驱动执行机构,具有高速、高力矩传递能力和较好的响应性能。液压系统则利用液体的压力能来传递动力,通过控制液压阀门来实现对执行机构的控制,具有高力矩传递能力、稳定性和精确度。
3、然而,使用气动或液压系统也存在一些缺点。首先,这些系统需要较为复杂的设备和管路来支持动力传递,增加了系统的复杂性和维护成本。其次,气动和液压系统通常需要额外的能源来产生压缩空气或液体压力,这可能导致能源的浪费和环境污染。此外,气动和液压系统在某些应用中可能存在泄漏和振动等问题,限制了其在一些精密控制场景中的应用。
4、相比之下,直接采用电机控制的方法具有一些优势。电机作为动力源具有高效、易于控制和节能等特点。通过电机实现多轴独立控制是一个具有挑战性的问题。多轴独立控制要求每个执行机构能够独立地控制其运动,以实现复杂的运动路径和协调运动。然而,由于动力源有限,实现多轴独立控制往往面临着资源分配和协调的问题。
技术实现思路
1、本发明所要解决的技术问题是:提供一种单电机控制双独立轴的连续体机械臂线缆驱动装置及方法,解决了现有技术中多轴独立协调控制难的问题。
2、本发明为解决上述技术问题采用以下技术方案:
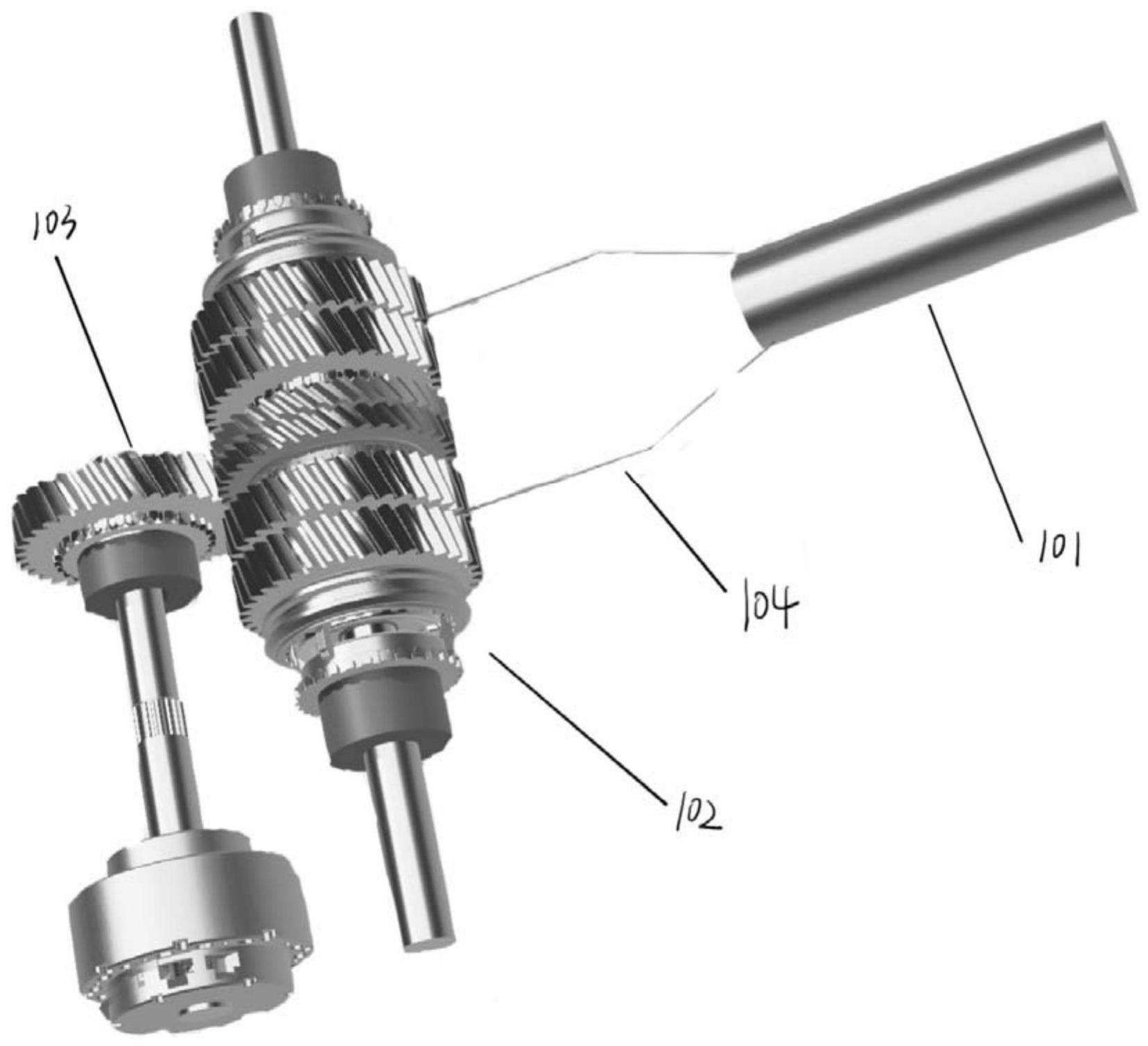
3、单电机控制双独立轴的连续体机械臂线缆驱动装置,包括主动力输出装置、从动力输出装置、蛇形绳控管状机械臂、绳驱钢丝;其中,主动力输出装置为从动力装置提供动力;从动力输出装置包括对称的两个驱动端,两个驱动端的输入端能够分时通过齿轮与主动力输出装置啮合连接,两个驱动端的输出端分别通过绳驱钢丝与蛇形绳控管状机械臂的不同部件连接。
4、所述主动力输出装置包括主动力轴、动力齿轮、伺服电机;其中,主动力轴的一端通过固定金属块连接动力齿轮,另一端连接伺服电机。
5、所述从动力装置的任一个驱动端均包括从外向内依次连接在从动力轴上的固定金属块、同步器划片、同步器弹簧、同步器滑块、绳控转轮;两个驱动端之间设置能够分时活动连接的传动齿轮;所述传动齿轮与主动力输出装置的动力齿轮啮合连接。
6、所述控绳转轮在从动力轴的轴向上固定,且能够绕从动力轴自由旋转;绳驱钢丝与控绳转轮连接。
7、所述控绳转轮包括两个,分别为第一控绳转轮、第二控绳转轮;绳驱钢丝在第一控绳转轮和第二控绳转轮之间旋转缠绕。
8、所述同步器滑块相对从动力轴的周向固定,且能够沿从动力轴的轴向在固定金属块与控绳转轮之间滑动;用于在传动齿轮与控绳转轮啮合前,控制同步器滑块与控绳齿轮啮合,保持控绳齿轮的当前相位。
9、所述绳驱钢丝通过钢丝长度的变化带动蛇形绳控管状机械臂角度及弯曲程度的变化。
10、单电机控制双独立轴的连续体机械臂线缆驱动方法,包括如下步骤:
11、步骤1、通过角度传感器获取机械臂当前位置状态;
12、步骤2、判断机械臂位姿是否达到预定状态,若到达预定状态则控制电机停转;
13、步骤3、控制同步器划片、转动齿轮的同步移动;
14、步骤4、控制电机继续运行;
15、步骤5、重复执行步骤1至步骤4,直至设定的工作流程完成。
16、所述角度传感器设置在电机或者蛇形机械臂关节处。
17、与现有技术相比,本发明具有以下有益效果:
18、1、本发明应用单电机控制多个独立轴单独工作,实现了通过机械装置的变动,完成一个电机不同步控制多个独立轴的作用。
19、2、本发明驱动装置机械结构原理简单易实现,且可以维持输出轴在受控结束后的偏转角度,不会造成突变、抖动等不安全现象。
20、3、本发明通过传感器实时采集连续体机械臂的位姿信息,并且根据位姿信息实时调节电机的运转,以及不同输出端的切换。
技术特征:
1.单电机控制双独立轴的连续体机械臂线缆驱动装置,其特征在于:包括主动力输出装置、从动力输出装置、蛇形绳控管状机械臂、绳驱钢丝;其中,主动力输出装置为从动力装置提供动力;从动力输出装置包括对称的两个驱动端,两个驱动端的输入端能够分时通过齿轮与主动力输出装置啮合连接,两个驱动端的输出端分别通过绳驱钢丝与蛇形绳控管状机械臂的不同部件连接。
2.根据权利要求1所述的单电机控制双独立轴的连续体机械臂线缆驱动装置,其特征在于:所述主动力输出装置包括主动力轴、动力齿轮、伺服电机;其中,主动力轴的一端通过固定金属块连接动力齿轮,另一端连接伺服电机。
3.根据权利要求2所述的单电机控制双独立轴的连续体机械臂线缆驱动装置,其特征在于:所述从动力装置的任一个驱动端均包括从外向内依次连接在从动力轴上的固定金属块、同步器划片、同步器弹簧、同步器滑块、绳控转轮;两个驱动端之间设置能够分时活动连接的传动齿轮;所述传动齿轮与主动力输出装置的动力齿轮啮合连接。
4.根据权利要求3所述的单电机控制双独立轴的连续体机械臂线缆驱动装置,其特征在于:所述控绳转轮在从动力轴的轴向上固定,且能够绕从动力轴自由旋转;绳驱钢丝与控绳转轮连接。
5.根据权利要求4所述的单电机控制双独立轴的连续体机械臂线缆驱动装置,其特征在于:所述控绳转轮包括两个,分别为第一控绳转轮、第二控绳转轮;绳驱钢丝在第一控绳转轮和第二控绳转轮之间旋转缠绕。
6.根据权利要求5所述的单电机控制双独立轴的连续体机械臂线缆驱动装置,其特征在于:所述同步器滑块相对从动力轴的周向固定,且能够沿从动力轴的轴向在固定金属块与控绳转轮之间滑动;用于在传动齿轮与控绳转轮啮合前,控制同步器滑块与控绳齿轮啮合,保持控绳齿轮的当前相位。
7.根据权利要求1所述的单电机控制双独立轴的连续体机械臂线缆驱动装置,其特征在于:所述绳驱钢丝通过钢丝长度的变化带动蛇形绳控管状机械臂角度及弯曲程度的变化。
8.单电机控制双独立轴的连续体机械臂线缆驱动方法,其特征在于:包括如下步骤:
9.根据权利要求8所述的单电机控制双独立轴的连续体机械臂线缆驱动方法,其特征在于:所述角度传感器设置在电机或者蛇形机械臂关节处。
技术总结
本发明公开了单电机控制双独立轴的连续体机械臂线缆驱动装置,包括主动力输出装置、从动力输出装置、蛇形绳控管状机械臂、绳驱钢丝;其中,主动力输出装置为从动力装置提供动力;从动力输出装置包括对称的两个驱动端,两个驱动端的输入端能够分时通过齿轮与主动力输出装置啮合连接,两个驱动端的输出端分别通过绳驱钢丝与蛇形绳控管状机械臂的不同部件连接。本发明应用单电机控制多个独立轴单独工作,实现了通过机械装置的变动,完成一个电机不同步控制多个独立轴的作用。机械结构原理简单易实现,且可以维持输出轴在受控结束后的偏转角度,不会造成突变、抖动等不安全现象。
技术研发人员:齐鹏,焦洋
受保护的技术使用者:同济大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!