一种高精度自动寻位装置及机器人的制作方法
本发明涉及智能机械,更具体地说,本发明涉及一种高精度自动寻位装置及机器人。
背景技术:
1、零点作为机器人坐标系的基准位置,对机械人的操作精度尤为重要,没有零点机器人就无法判断自身的位置,因此工业机器人在出厂之前均会对机器人的机械参数及零点位置进行标定,但在特殊情况下,如电池或同步带更换、断电、手动移动机器人关节等均会造成零点的丢失。
2、现有技术中,寻位零点常用的零点标定方式有贴标刻线式、插销式或v槽式以及专业测量仪器辅助标定,贴标刻线式非常依赖刻线的精度,插销式或v槽式在制造或装配过程中会存在误差,专业测量仪器辅助标定存在操作误差或仪器误差,综合上述这些标定方式,操作繁琐,且普遍都有毫米级偏差,偏差会导致机器人轨迹精度不高,无法满足高精度的应用。
技术实现思路
1、本发明提供的一种高精度自动寻位装置及机器人,所要解决的问题是:现有的零点标定方式操作繁琐,且普遍都有毫米级偏差,偏差会导致机器人轨迹精度不高,无法满足高精度的应用。
2、为实现上述目的,本发明提供如下技术方案:一种高精度自动寻位装置,包括零点标定杆和标定支承部件,零点标定杆固定安装在转动座的边缘位置处,标定支承部件的底部设置有弹性伸缩器,标定支承部件通过弹性伸缩器竖向活动安装在固定座上;
3、还包括触发部件,触发部件设置在标定支承部件的底部,并且触发部件固定安装在固定座上;
4、自动寻位零点时,转动座相对于固定座自转,当零点标定杆与标定支承部件对位接触时,零点标定杆推动标定支承部件向下移动,在触发部件被标定支承部件触发时,转动座所处的位置为零点位置。
5、在一个优选的实施方式中,零点标定杆为销钉一,销钉一固定安装在转动座上,标定支承部件为顶钉,弹性伸缩器包括固定安装在固定座上的支撑座,支撑座内开设凹槽,凹槽的内壁上滑动连接有升降板,顶钉固定安装在升降板上,升降板的底部固定连接弹性件一,弹性件一的底端与凹槽的底部内壁固定连接,触发部件固定安装在凹槽的底部内壁上。
6、在一个优选的实施方式中,零点标定杆包括销钉二,销钉二的底端固定连接有导电片,销钉二安装在转动座上,标定支承部件包括调节座,调节座的顶部固定安装有电阻片,弹性伸缩器包括辅助座,所调节座滑动连接辅助座内,调节座的底部固定连接有弹性件二,弹性件二的底端与辅助座的内壁固定连接,触发部件固定安装在辅助座的内壁上。
7、在一个优选的实施方式中,固定座的顶部开设有矩形孔,所固定座内固定安装有直线驱动器一,辅助座固定安装有在直线驱动器的输出端上,矩形孔与辅助座相适配。
8、在一个优选的实施方式中,转动座上固定安装有支撑板,支撑板上开设有卡槽,卡槽的底部内壁上开设通孔,销钉二的顶端固定连接有卡板,卡板位于卡槽内,支撑板通过圆轴与卡板相卡装。
9、在一个优选的实施方式中,辅助座的内壁上固定连接有两个对称设置的限位座,限位座用于对调节座进行限位。
10、在一个优选的实施方式中,调节座的顶部开设有安装槽,电阻片固定安装在安装槽内。
11、在一个优选的实施方式中,辅助座的两侧均开设有连通孔,两个连通孔为对称设置。
12、一种机器人,包括以上高精度自动寻位装置,还包括机器人本体,机器人本体包括固定座,固定座上转动连接有转动座,转动座上固定安装有转动驱动器一,转动驱动器一的输出轴上固定安装有机械臂一,机械臂一上固定安装有转动驱动器二,转动驱动器二上固定安装有机械臂二,机械臂二的输出端固定安装抓取机构。
13、在一个优选的实施方式中,抓取机构包括安装架,安装架固定安装在机械臂二上,所述安装架上固定安装有直线驱动器二,直线驱动器二的输出端固定安装有气动座,气动座上滑动连接有导轨。
14、本发明的有益效果在于:
15、1、本发明在寻位零点时,使用销钉一与顶钉对位接触,提高了寻位零点的效率,并且降低了寻位零点的误差,保证了零点的精确性。
16、2、本发明通过设置导电片与电阻片,在寻位零点时使导电片接触并滑动在电阻片上,通过改变接入电路的部分电阻来改变电路中的电流,当电流数值与预设值相符时完成寻位零点。
技术特征:
1.一种高精度自动寻位装置,其特征在于,包括:
2.根据权利要求1所述的一种高精度自动寻位装置,其特征在于:零点标定杆为销钉一(2),所述销钉一(2)固定安装在转动座(12)上,所述标定支承部件为顶钉(3),所述弹性伸缩器包括固定安装在固定座(11)上的支撑座(31),所述支撑座(31)内开设凹槽,所述凹槽的内壁上滑动连接有升降板(32),所述顶钉(3)固定安装在升降板(32)上,所述升降板(32)的底部固定连接弹性件一(33),所述弹性件一(33)的底端与凹槽的底部内壁固定连接,所述触发部件(4)固定安装在凹槽的底部内壁上。
3.根据权利要求1所述的一种高精度自动寻位装置,其特征在于:零点标定杆包括销钉二(5),所述销钉二(5)的底端固定连接有导电片(51),所述销钉二(5)安装在转动座(12)上,所述标定支承部件包括调节座(6),所述调节座(6)的顶部固定安装有电阻片(61),所述弹性伸缩器包括辅助座(62),所调节座(6)滑动连接辅助座(62)内,所述调节座(6)的底部固定连接有弹性件二(63),所述弹性件二(63)的底端与辅助座(62)的内壁固定连接,所述触发部件(4)固定安装在辅助座(62)的内壁上。
4.根据权利要求3所述的一种高精度自动寻位装置,其特征在于:所述固定座(11)的顶部开设有矩形孔,所固定座(11)内固定安装有直线驱动器一,所述辅助座(62)固定安装有在直线驱动器的输出端上,所述矩形孔与辅助座(62)相适配。
5.根据权利要求3所述的一种高精度自动寻位装置,其特征在于:所述转动座(12)上固定安装有支撑板,所述支撑板上开设有卡槽,所述卡槽的底部内壁上开设通孔,所述销钉二(5)的顶端固定连接有卡板,所述卡板位于卡槽内,所述支撑板通过圆轴与卡板相卡装。
6.根据权利要求3所述的一种高精度自动寻位装置,其特征在于:辅助座(62)的内壁上固定连接有两个对称设置的限位座(64),所述限位座(64)用于对调节座(6)进行限位。
7.根据权利要求3所述的一种高精度自动寻位装置,其特征在于:所述调节座(6)的顶部开设有安装槽,所述电阻片(61)固定安装在安装槽内。
8.根据权利要求3所述的一种高精度自动寻位装置,其特征在于:所述辅助座(62)的两侧均开设有连通孔,两个所述连通孔为对称设置。
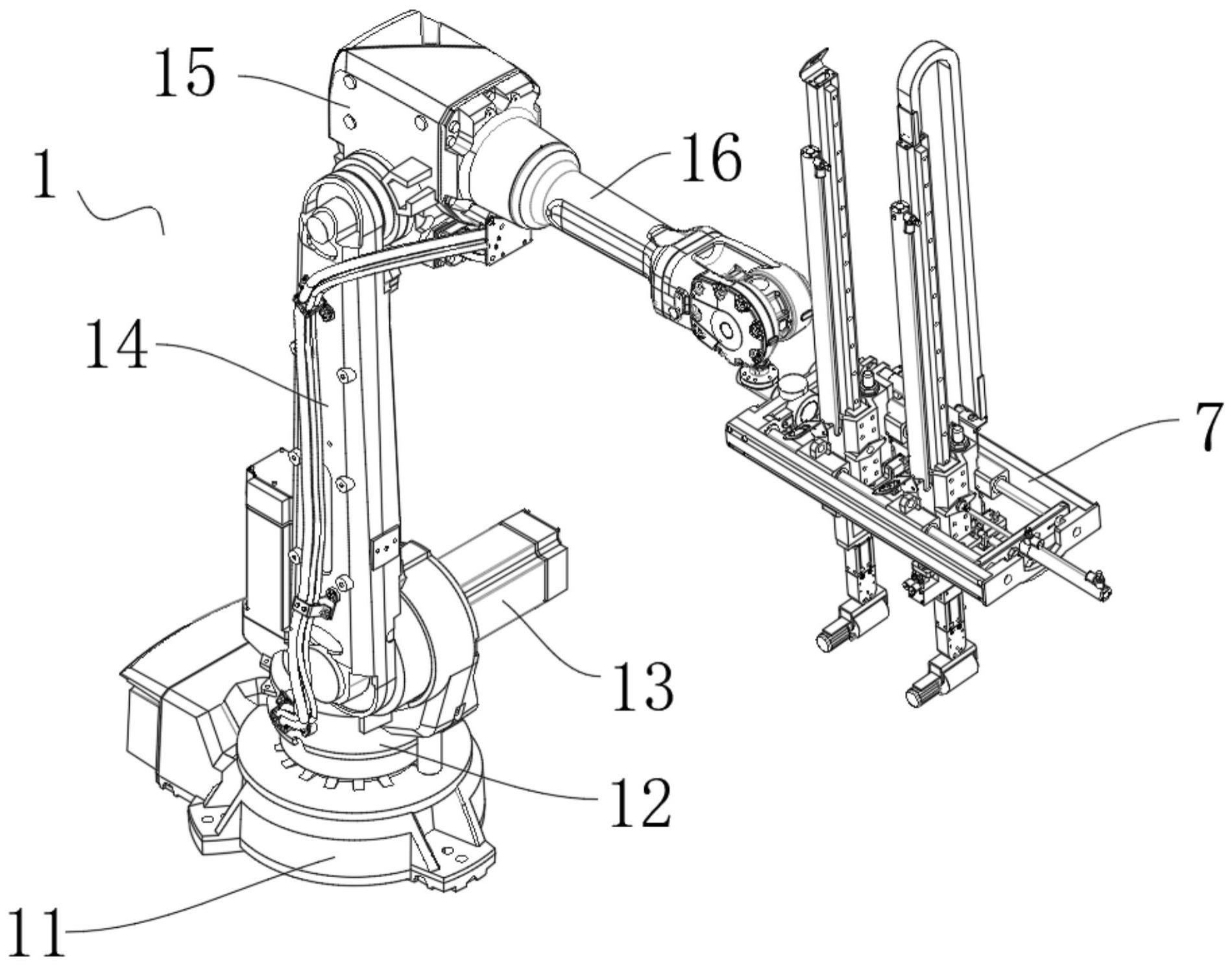
9.一种机器人,其特征在于:包括如权利要求1-8任一项所述的高精度自动寻位装置,还包括机器人本体(1),所述机器人本体(1)包括固定座(11),所述固定座(11)上转动连接有转动座(12),所述转动座(12)上固定安装有转动驱动器一(13),所述转动驱动器一(13)的输出轴上固定安装有机械臂一(14),所述机械臂一(14)上固定安装有转动驱动器二(15),所述转动驱动器二(15)的输出轴上固定安装有机械臂二(16),所述机械臂二(16)的末端固定安装有抓取机构(7)。
10.根据权利要求9所述的一种机器人,其特征在于:所述抓取机构(7)包括安装架,所述安装架固定安装在机械臂二(16)上,所述安装架上固定安装有直线驱动器二,所述直线驱动器二的输出端固定安装有气动座,所述气动座上滑动连接有导轨。
技术总结
本发明公开了一种高精度自动寻位装置及机器人,具体涉及智能机械领域,一种高精度自动寻位装置,包括零点标定杆和标定支承部件,零点标定杆固定安装在转动座的边缘位置处,标定支承部件的底部设置有弹性伸缩器,标定支承部件通过弹性伸缩器竖向活动安装在固定座上;还包括触发部件,触发部件设置在标定支承部件的底部。本发明在寻位零点时,使用销钉一与顶钉对位接触,提高了寻位零点的效率,并且降低了寻位零点的误差,保证了零点的精确性;通过设置导电片与电阻片,在寻位零点时使导电片接触并滑动在电阻片上,通过改变接入电路的部分电阻来改变电路中的电流,当电流数值与预设值相符时完成寻位零点。
技术研发人员:杨裕才,罗涛,董泽锋,王崎,夏荣康,黄明玉,廖世亮,黄争生,林帅
受保护的技术使用者:芜湖藦卡机器人科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!