基于机理数据混合驱动的机器人动态误差预测方法及系统
本发明属于机器人,具体涉及一种基于机理数据混合驱动的机器人动态误差预测方法及系统。
背景技术:
1、工业机器人是广泛用于工业领域的多关节机械手或多自由度的机器装置,具有一定的自动性,可依靠自身的动力能源和控制能力实现各种工业加工制造功能。工业机器人被广泛应用于电子、物流、化工等各个工业领域之中。工业机器人具有较高的灵活性和较低的成本,因此被广泛应用于制造业,然而跟踪精度较低限制了其在高精度制造领域的应用。
2、目前提高工业机器人跟踪精度的方法是通过机器人动力学模型的正向应用,同时借助simscape进行动力学仿真,该控制模式实现了对机器人终端执行机构在工作空间的连续控制。它要求在一定精度范围内严格按照预定的轨迹和速度运动。并且速度可控,运动轨迹流畅,完成任务。这种方式能够预测出机器人终端执行机构的动态误差。
3、然而现有的动力学模型存在复杂物理过程,难以用解析形式的数学模型描述,且存在强非线性拟合能力不强等问题。
技术实现思路
1、针对现有技术存在的难以解析以及强非线性拟合能力不强导致的动态误差预测不及时的问题,本发明提供一种基于机理数据混合驱动的机器人动态误差预测方法及系统,以解决上述技术问题。
2、第一方面,本发明提供一种基于机理数据混合驱动的机器人动态误差预测方法,包括:
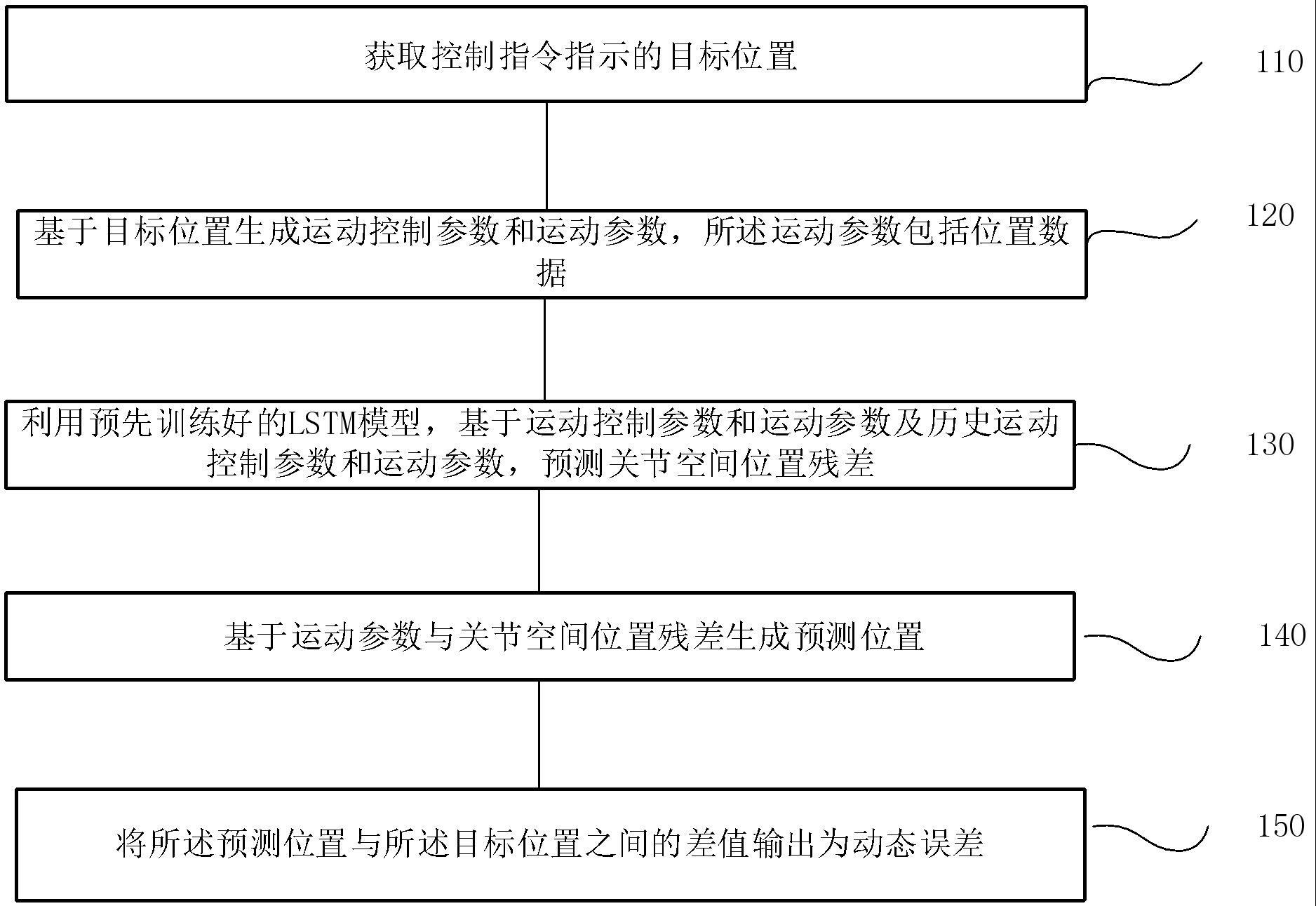
3、获取控制指令指示的目标位置;
4、基于目标位置生成运动控制参数和运动参数,所述运动参数包括位置数据;
5、利用预先训练好的lstm模型,基于运动控制参数和运动参数及历史运动控制参数和运动参数,预测关节空间位置残差;
6、基于运动参数与关节空间位置残差生成预测位置;
7、将所述预测位置与所述目标位置之间的差值输出为动态误差;
8、lstm模型的训练方法包括:
9、使用蒙特卡洛法让机器人末端跑随机轮廓,使得机器人运动轨迹充满工作空间;
10、在机器人运动过程中,收集电机位置、速度、关节空间下的位置和速度及笛卡尔空间下的位置和速度,并从机器人控制系统获取相应的目标位置和实际位置,将所有数据保存至数据集;
11、利用所述数据集对预先构建的lstm模型进行训练。
12、在一个可选的实施方式中,基于目标位置生成运动控制参数和运动参数,所述运动参数包括位置数据,包括:
13、利用pid模型基于目标位置和机器人当前位置生成运动控制参数,所述运动控制参数包括电机位置、速度和力矩;
14、将力矩输入柔性动力学模型得到运动参数,所述运动参数包括关节空间下的位置和速度及笛卡尔空间下的位置和速度;
15、将电机位置、速度和运动参数标记生成时间后保存至输入数据集;
16、监控所述输入数据集中的数据的生成时间,若生成时间距当前时刻的时长超过设定的时间阈值则清除相应数据。
17、在一个可选的实施方式中,利用预先训练好的lstm模型基于运动控制参数和运动参数及历史运动控制参数和运动参数,预测关节空间位置残差,包括:
18、将所述输入数据集作为输入参数导入预先训练好的lstm模型,得到lstm模型预测的关节空间位置残差。
19、在一个可选的实施方式中,基于运动参数与关节空间位置残差生成预测位置,包括:
20、从所述运动参数中提取关节空间位置;
21、将关节空间位置与关节空间位置残差的和输出为预测位置。
22、第二方面,本发明提供一种基于机理数据混合驱动的机器人动态误差预测系统,包括:
23、目标获取模块,用于获取控制指令指示的目标位置;
24、参数获取模块,用于基于目标位置生成运动控制参数和运动参数,所述运动参数包括位置数据;
25、残差预测模块,用于利用预先训练好的lstm模型,基于运动控制参数和运动参数及历史运动控制参数和运动参数,预测关节空间位置残差;
26、位置预测模块,用于基于运动参数与关节空间位置残差生成预测位置;
27、误差预测模块,用于将所述预测位置与所述目标位置之间的差值输出为动态误差;
28、lstm模型的训练方法包括:
29、使用蒙特卡洛法让机器人末端跑随机轮廓,使得机器人运动轨迹充满工作空间;
30、在机器人运动过程中,收集电机位置、速度、关节空间下的位置和速度及笛卡尔空间下的位置和速度,并从机器人控制系统获取相应的目标位置和实际位置,将所有数据保存至数据集;
31、利用所述数据集对预先构建的lstm模型进行训练。
32、在一个可选的实施方式中,所述参数获取模块包括:
33、第一生成单元,用于利用pid模型基于目标位置和机器人当前位置生成运动控制参数,所述运动控制参数包括电机位置、速度和力矩;
34、第二生成单元,用于将力矩输入柔性动力学模型得到运动参数,所述运动参数包括关节空间下的位置和速度及笛卡尔空间下的位置和速度;
35、参数保存单元,用于将电机位置、速度和运动参数标记生成时间后保存至输入数据集;
36、定期清理单元,用于监控所述输入数据集中的数据的生成时间,若生成时间距当前时刻的时长超过设定的时间阈值则清除相应数据。
37、在一个可选的实施方式中,所述残差预测模块包括:
38、数据输入单元,用于将所述输入数据集作为输入参数导入预先训练好的lstm模型,得到lstm模型预测的关节空间位置残差。
39、在一个可选的实施方式中,位置预测模块包括:
40、参数提取单元,用于从所述运动参数中提取关节空间位置;
41、残差补偿单元,用于将关节空间位置与关节空间位置残差的和输出为预测位置。
42、第三方面,提供一种终端,包括:
43、处理器、存储器,其中,
44、该存储器用于存储计算机程序,
45、该处理器用于从存储器中调用并运行该计算机程序,使得终端执行上述的终端的方法。
46、第四方面,提供了一种计算机存储介质,所述计算机可读存储介质中存储有指令,当其在计算机上运行时,使得计算机执行上述各方面所述的方法。
47、本发明的有益效果在于,本发明提供的基于机理数据混合驱动的机器人动态误差预测方法及系统,通过对pid模型对伺服电机的运动控制参数进行跟踪预测得到一个关节空间位置,再利用lstm模型对关节空间位置进行误差预测,进而得到一个预测的实际位置,将预测的实际位置与目标位置进行比对即可得到动态误差,本发明大大降低了动态误差预测的计算量,提升了动态误差预测的效率。
48、此外,本发明设计原理可靠,结构简单,具有非常广泛的应用前景。
技术特征:
1.一种基于机理数据混合驱动的机器人动态误差预测方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,基于目标位置生成运动控制参数和运动参数,所述运动参数包括位置数据,包括:
3.根据权利要求2所述的方法,其特征在于,利用预先训练好的lstm模型基于运动控制参数和运动参数及历史运动控制参数和运动参数,预测关节空间位置残差,包括:
4.根据权利要求1所述的方法,其特征在于,基于运动参数与关节空间位置残差生成预测位置,包括:
5.一种基于机理数据混合驱动的机器人动态误差预测系统,其特征在于,包括:
6.根据权利要求5所述的系统,其特征在于,所述参数获取模块包括:
7.根据权利要求6所述的系统,其特征在于,所述残差预测模块包括:
8.根据权利要求5所述的系统,其特征在于,所述位置预测模块包括:
技术总结
本发明涉及机器人技术领域,具体提供一种基于机理数据混合驱动的机器人动态误差预测方法及系统,包括:获取控制指令指示的目标位置;基于目标位置生成运动控制参数和运动参数,所述运动参数包括位置数据;利用预先训练好的LSTM模型基于运动控制参数和运动参数及历史运动控制参数和运动参数,预测关节空间位置残差;基于运动参数与关节空间位置残差生成预测位置;将所述预测位置与所述目标位置之间的差值输出为动态误差。本发明大大降低了动态误差预测的计算量,提升了动态误差预测的效率。
技术研发人员:姬帅,邓金栋,倪鹤鹏,叶瑛歆,吴乐,胡天亮,高晓明,张承瑞
受保护的技术使用者:山东建筑大学
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!