一种移动式三维扫描测量机器人的制作方法
本发明属于自动化测量,尤其涉及一种移动式三维扫描测量机器人。
背景技术:
1、机器人技术有效改善了人类工作方式、极大解放了社会生产力。作为地面移动机器人之一,低速无人车最早可追溯到上世纪 50 年代时美国 barrett electronics 公司研发的世界首台自动引导车辆,当时只能在特定小范围移动且功能有限,随着机械制造业现代化发展的脚步,对复杂零部件的尺寸提出了更高的要求,传统的测量方法采用三坐标测量仪或激光扫描仪等三维测量设备。
2、如公告号为 cn106737554a公开的一种自主式道路无损检测机器人系统,包括机器人本体系统、控制系统、远程监控系统,远程监控系统与机器人本体系统及控制系统无线连接,机器人本体系统与控制系统电联接,机器人本体系统包括车载平台、检测机构和监测装置,检测机构设置于车载平台的前端侧面或后端侧面上。本发明不仅探测效率高,检测结果的准确度高,而且降低了工作人员的劳动强度,可有效保障工作人员的人身安全,本发明可有效避免人工检测方式的不稳定因素,提高了检测精度,缩短了检测时间。
3、但其在使用过程中,当摄像头需要清洁时,不能够对摄像头自动清洗,使得杂质容易粘附在摄像头表面,从而影响机器人的扫描测量的效果,不利于使用。
技术实现思路
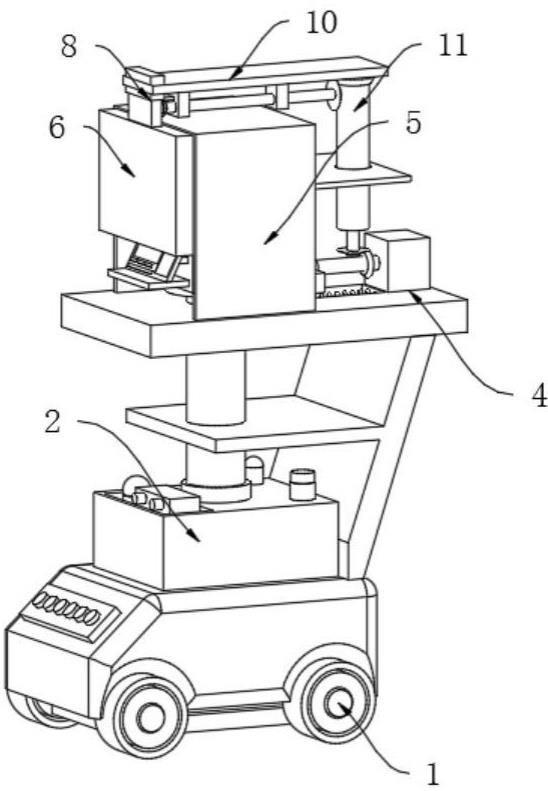
1、本发明针对现有技术中当摄像头需要清洁时,不能够对摄像头自动清洗,使得杂质容易粘附在摄像头表面,从而影响机器人的扫描测量的效果,不利于使用的问题,提出如下技术方案:一种移动式三维扫描测量机器人,包括移动装置,移动装置的顶部设置有监测机构,监测机构的顶部固定连接有固定杆,固定杆的顶部固定安装有摄像头,摄像头的一侧设置有显示屏,固定杆的外表面且位于摄像头的底部固定连接有安装板,安装板的顶部且位于摄像头的外侧滑动连接有防护壳,防护壳的一侧设置有固定块,固定块的一侧设置有清洁块,固定块的顶部固定连接有伸缩杆,伸缩杆的一侧固定连接有移动板,伸缩杆的顶端固定连接有连接板,连接板的一端底部转动连接有转动杆,转动杆的底部固定连接有第一连接轴,第一连接轴的底端固定连接有第一齿轮,转动杆的顶端固定连接有第三齿轮,第三齿轮的一侧啮合有第四齿轮,第四齿轮的中部固定连接有第二连接轴,第二连接轴的一端固定连接有凸轮,防护壳的另一侧设置有电机,电机的输出端固定连接有活动杆,活动杆的中部固定连接有螺纹杆,螺纹杆的外表面螺纹连接有螺纹块,活动杆的一端转动连接有固定板,安装板的顶部开设有第一滑槽,螺纹块的底部与第一滑槽滑动连接,螺纹块的底端一侧外表面固定连接有压缩弹簧,压缩弹簧的一端与固定板固定连接,活动杆的中部固定连接有第二齿轮,第一齿轮与第二齿轮啮合,螺纹块的顶部固定连接有第一电动推杆,第一电动推杆的顶部固定连接有推动板,推动板的顶部与连接板的底部固定连接。
2、作为上述技术方案的优选,电机与安装板的顶部固定连接,防护壳位于安装板的右侧,防护壳的底部开设有通口,活动杆穿过通口延伸至防护壳的内部,固定板位于防护壳的内部,且其位于摄像头的左侧,固定板与安装板固定连接。
3、作为上述技术方案的优选,活动杆与螺纹杆位于第一滑槽的顶部,活动杆靠近螺纹杆的一端固定连接有限位环,螺纹块位于防护壳的一侧,第一电动推杆位于螺纹块的顶部两端,防护壳靠近螺纹块的一侧开设有第二滑槽,推动板的一端与第二滑槽滑动连接,推动板的一端与转动杆转动连接。
4、作为上述技术方案的优选,第二连接轴与连接板位于防护壳的顶部,连接板的底部两端均固定连接有第一连接块,第二连接轴与第一连接块转动连接,移动板位于伸缩杆的伸缩端,移动板位于连接板的底部。
5、作为上述技术方案的优选,固定块的一侧开设有两个活动口,活动口的内部设置有滑动块,滑动块的两侧均与活动口的内壁滑动连接,滑动块的内壁滑动连接有固定轴,固定轴的一端与清洁块固定连接,固定轴远离清洁块的一侧固定连接有第一弹簧,第一弹簧的一端固定连接有活动板,活动板与滑动块的内壁活动连接。
6、作为上述技术方案的优选,清洁块与摄像头贴合,活动板的一侧固定连接有第二连接块,第二连接块的一侧固定连接有圆凸,圆凸的一侧且位于第二连接块的一侧外表面固定连接有第二弹簧,第二弹簧的一端与活动口的内壁固定连接,活动口的一侧且位于固定块的内部开始有移动槽,移动槽的内部设置有调节装置。
7、作为上述技术方案的优选,调节装置包括移动挡板,移动挡板与移动槽活动连接,移动挡板的一侧固定连接有第一齿条,第一齿条的一侧啮合有转动齿轮,转动齿轮的一侧啮合有第二齿条,第二齿条的一侧固定连接有活动块,活动块的一端固定连接有第二电动推杆。
8、作为上述技术方案的优选,转动齿轮的中部固定连接有连接杆,连接杆的上下两端均与移动槽的内壁转动连接,第二电动推杆的一端与移动槽的内壁固定连接,活动块与移动槽活动连接,活动块靠近圆凸的一端固定连接有挤压块,挤压块与圆凸相抵触。
9、本发明的有益效果为:
10、1、通过电机、活动杆、螺纹杆、螺纹块、防护壳、第一齿轮、第二齿轮、第三齿轮、第四齿轮、第二连接轴、第一连接轴、转动杆、连接板、第一电动推杆、推动板、伸缩杆、凸轮、连接板、固定块与清洁块的配合使用,通过电机带动活动杆与螺纹杆转动,使得螺纹块带动防护壳移动,使得防护壳移动到摄像头的外部,同时通过第一电动推杆带动连接板与转动杆向下移动,使得第一齿轮与第二齿轮啮合,带动转动杆与第一连接轴转动,从而使得第三齿轮与第四齿轮转动,将第二连接轴带动凸轮转动,使得凸轮挤压连接板,使得伸缩杆伸缩,带动固定块与清洁块上下移动对摄像头进行清洁,从而便于将摄像头表面清洁干净,有利于提高机器人扫描测量的效果,便于使用。
11、2、通过清洁块、固定轴、第一弹簧、滑动块、活动板、第二连接块、圆凸、第二弹簧、移动挡板、第一齿条、转动齿轮、第二齿条、活动块与第二电动推杆的配合使用,通过第二电动推杆带动活动块与第二齿条移动,使得挤压块不在挤压圆凸,在第二弹簧与第一弹簧的作用下,使得固定块带动清洁块移动到固定块的内部,同时第二齿条转动使得转动齿轮转动,将第一齿条与移动挡板相活动口移动,将活动口挡住,便于将清洁块固定在固定块的内部,使得清洁块在不使用时保持洁净度,便于清洁块的使用。
技术特征:
1.一种移动式三维扫描测量机器人,包括移动装置(1),所述移动装置(1)的顶部设置有监测机构(2),所述监测机构(2)的顶部固定连接有固定杆,所述固定杆的顶部固定安装有摄像头(3),所述摄像头(3)的一侧设置有显示屏,其特征在于,所述固定杆的外表面且位于摄像头(3)的底部固定连接有安装板(4),所述安装板(4)的顶部且位于摄像头(3)的外侧滑动连接有防护壳(5),所述防护壳(5)的一侧设置有固定块(6),所述固定块(6)的一侧设置有清洁块(7),所述固定块(6)的顶部固定连接有伸缩杆(8),所述伸缩杆(8)的一侧固定连接有移动板(9),所述伸缩杆(8)的顶端固定连接有连接板(10),所述连接板(10)的一端底部转动连接有转动杆(11),所述转动杆(11)的底部固定连接有第一连接轴,所述第一连接轴的底端固定连接有第一齿轮(23),所述转动杆(11)的顶端固定连接有第三齿轮(12),所述第三齿轮(12)的一侧啮合有第四齿轮(13),所述第四齿轮(13)的中部固定连接有第二连接轴(14),所述第二连接轴(14)的一端固定连接有凸轮(15),所述防护壳(5)的另一侧设置有电机(16),所述电机(16)的输出端固定连接有活动杆(17),所述活动杆(17)的中部固定连接有螺纹杆(18),所述螺纹杆(18)的外表面螺纹连接有螺纹块(19),所述活动杆(17)的一端转动连接有固定板(20),所述安装板(4)的顶部开设有第一滑槽,所述螺纹块(19)的底部与第一滑槽滑动连接,所述螺纹块(19)的底端一侧外表面固定连接有压缩弹簧(21),所述压缩弹簧(21)的一端与固定板(20)固定连接,所述活动杆(17)的中部固定连接有第二齿轮(22),所述第一齿轮(23)与第二齿轮(22)啮合,所述螺纹块(19)的顶部固定连接有第一电动推杆(24),所述第一电动推杆(24)的顶部固定连接有推动板(25),所述推动板(25)的顶部与连接板(10)的底部固定连接。
2.根据权利要求1所述的移动式三维扫描测量机器人,其特征在于,所述电机(16)与安装板(4)的顶部固定连接,所述防护壳(5)位于安装板(4)的右侧,所述防护壳(5)的底部开设有通口,所述活动杆(17)穿过通口延伸至防护壳(5)的内部,所述固定板(20)位于防护壳(5)的内部,且其位于摄像头(3)的左侧,所述固定板(20)与安装板(4)固定连接。
3.根据权利要求1所述的移动式三维扫描测量机器人,其特征在于,所述活动杆(17)与螺纹杆(18)位于第一滑槽的顶部,所述活动杆(17)靠近螺纹杆(18)的一端固定连接有限位环,所述螺纹块(19)与防护壳(5)固定连接,所述第一电动推杆(24)位于螺纹块(19)的顶部两端,所述防护壳(5)靠近螺纹块(19)的一侧开设有第二滑槽,所述推动板(25)的一端与第二滑槽滑动连接,所述推动板(25)的一端与转动杆(11)转动连接。
4.根据权利要求1所述的移动式三维扫描测量机器人,其特征在于,所述第二连接轴(14)与连接板(10)位于防护壳(5)的顶部,所述连接板(10)的底部两端均固定连接有第一连接块,所述第二连接轴(14)与第一连接块转动连接,所述移动板(9)位于伸缩杆(8)的伸缩端,所述移动板(9)位于连接板(10)的底部。
5.根据权利要求1所述的移动式三维扫描测量机器人,其特征在于,所述固定块(6)的一侧开设有两个活动口,所述活动口的内部设置有滑动块(26),所述滑动块(26)的两侧均与活动口的内壁滑动连接,所述滑动块(26)的内壁滑动连接有固定轴(27),所述固定轴(27)的一端与清洁块(7)固定连接,所述固定轴(27)远离清洁块(7)的一侧固定连接有第一弹簧,所述第一弹簧的一端固定连接有活动板(28),所述活动板(28)与滑动块(26)的内壁活动连接。
6.根据权利要求5所述的移动式三维扫描测量机器人,其特征在于,所述清洁块(7)与摄像头(3)贴合,所述活动板(28)的一侧固定连接有第二连接块,所述第二连接块的一侧固定连接有圆凸(29),所述圆凸(29)的一侧且位于第二连接块的一侧外表面固定连接有第二弹簧(30),所述第二弹簧(30)的一端与活动口的内壁固定连接,所述活动口的一侧且位于固定块(6)的内部开始有移动槽,所述移动槽的内部设置有调节装置。
7.根据权利要求5所述的移动式三维扫描测量机器人,其特征在于,所述调节装置包括移动挡板(31),所述移动挡板(31)与移动槽活动连接,所述移动挡板(31)的一侧固定连接有第一齿条(32),所述第一齿条(32)的一侧啮合有转动齿轮(33),所述转动齿轮(33)的一侧啮合有第二齿条(34),所述第二齿条(34)的一侧固定连接有活动块(35),所述活动块(35)的一端固定连接有第二电动推杆(36)。
8.根据权利要求7所述的移动式三维扫描测量机器人,其特征在于,所述转动齿轮(33)的中部固定连接有连接杆,所述连接杆的上下两端均与移动槽的内壁转动连接,所述第二电动推杆(36)的一端与移动槽的内壁固定连接,所述活动块(35)与移动槽活动连接,所述活动块(35)靠近圆凸(29)的一端固定连接有挤压块(37),所述挤压块(37)与圆凸(29)相抵触。
技术总结
本发明属于自动化测量领域,公开了一种移动式三维扫描测量机器人,该移动式三维扫描测量机器人包括移动装置,移动装置的顶部设置有监测机构,监测机构的顶部固定连接有固定杆,固定杆的顶部固定安装有摄像头,摄像头的一侧设置有显示屏,固定杆的外表面且位于摄像头的底部固定连接有安装板,安装板的顶部且位于摄像头的外侧滑动连接有防护壳。通过电机、活动杆、螺纹杆、螺纹块、防护壳、第一齿轮、第二齿轮、第三齿轮、第四齿轮、第二连接轴、转动杆、第一电动推杆、推动板、伸缩杆、凸轮、连接板、固定块与清洁块的配合使用,从而便于将摄像头表面清洁干净,有利于提高机器人扫描测量的效果,便于使用。
技术研发人员:范生宏,范文杰
受保护的技术使用者:北京普达迪泰科技有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!