一种铸造件清理机器人智能安全辅助装备的制作方法
本发明涉及机器人防护服,尤其涉及一种铸造件清理机器人智能安全辅助装备。
背景技术:
1、机器人逐步代替人工从事工作环境差、劳动强度大及伤害性强的工作。机器人在铸造件切割打磨过程的工作环境恶劣,过程中产生的残料、碎屑及火星具有很强的冲击力,易对机器人产生破坏的风险;且飞溅的废屑、扬起的粉尘,极易进入机器人的关节等位置,使机器人受到污染甚至破坏。现有铸造件切割打磨过程使用的机器人都采用防护装备进行防护。
2、现有的防护装备是在机器人的外部穿上一层防护服,由于防护服是一个相对密闭的空间,导致能量堆积而温度升高,多数防护服会增加温控装置调节防护服内部温度。但是现有的温控装置只通过阀门与防护服的内部连通,防护服包裹在机器人上的不同位置形成的空间大小不一致,且其内部空气不流通,热对流效果差,因此导致温控装置对于阀门远端部分的温度调节不理想。
技术实现思路
1、本发明提供一种铸造件清理机器人智能安全辅助装备,以解决现有的防护装备的温控装置对于阀门远端部分的温度调节不理想的技术问题。
2、为了实现上述目的,本发明的技术方案是:
3、一种铸造件清理机器人智能安全辅助装备,用于机器人的防护,包括:防护装置、温控装置及上位机;防护装置包括:包裹机器人并形成密闭空间的外防护组件、多个螺旋状的导向气嚢、多个支撑气嚢以及外防护组件外的风机;导向气嚢和支撑气嚢均位于封闭空间内,多个导向气嚢分别对应机器人的各关节并连接外防护组件,多个支撑气嚢均布在机器人臂梁的外周面并连接外防护组件;风机为外防护组件、导向气嚢、支撑气嚢充气;温控部件包括温控箱和与温控箱连通的导液管;导向气嚢朝向机器人侧开设有螺旋导向槽,导液管在机器人的各关节处沿螺旋导向槽盘绕、在机器人的臂梁处沿外防护组件内壁布设;风机和温控箱均电连接上位机。
4、进一步的,外防护组件包括多个防护气嚢和多个弹性耐磨的连接件;多个防护气嚢分别包裹在机器人臂梁的外侧,多个连接件分别包裹在机器人的各关节处,多个防护气嚢和多个连接件相连接形成密闭空间。
5、进一步的,支撑气嚢固设在防护气嚢的内壁,支撑气嚢充气后抵接机器人臂梁的外周面。
6、进一步的,连接件采用聚氨酯pu材料。
7、进一步的,导向气嚢的螺旋截面为半圆形,半圆形的直线朝向机器人。
8、进一步的,导液管包括进液口和出液口,温控箱连接进液口和出液口形成回路;进液口设有第一温度传感器和第一压力传感器,出液口设有第二温度传感器和第二压力传感器,第一温度传感器、第一压力传感器、第二温度传感器及第二压力传感器均电连接上位机。
9、进一步的,风机与封闭空间之间设有第一送风管连通,风机与导向气嚢之间设有第二送风管连通,风机与支撑气嚢之间设有第三送风管连通。
10、进一步的,外防护组件内设有第三温度传感器和第三压力传感器,第三温度传感器和第三压力传感器均无线连接上位机。
11、进一步的,导向气嚢内设有第四压力传感器,第四压力传感器无线连接上位机。
12、进一步的,支撑气嚢内设有第五压力传感器,第五压力传感器无线连接上位机。
13、有益效果:
14、第一、本申请设置外防护组件为气嚢式,能够抵挡打磨过程中产生的残料、碎屑及火星的冲击,隔离飞溅的废屑和扬起的粉尘,对机器人起到保护作用;还在机器人的各关节处和臂梁处设置导液管实现对整个密闭空间的温度控制,解决现有的温控装置对于远端部分的温度调节不理想的问题。
15、第二、本申请通过导向气嚢使导液管在机器人的各关节处沿螺旋盘绕,通过支撑气嚢支撑使导液管与机器人的关节不接触,螺旋盘绕的导液管能够随机器人的转动而伸缩和扭动,避免导液管随机器人动作而损坏。
技术特征:
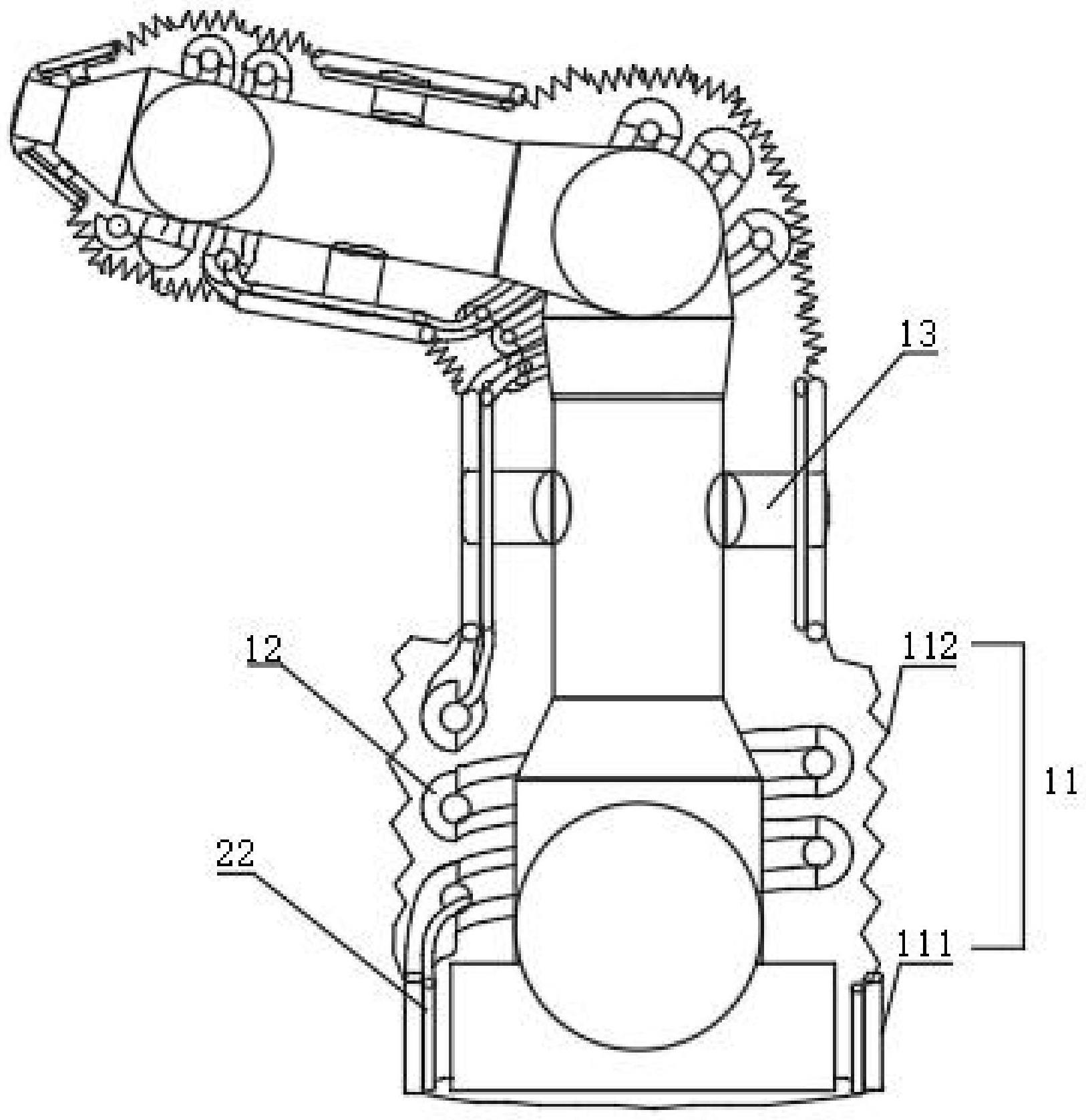
1.一种铸造件清理机器人智能安全辅助装备,用于机器人的防护,其特征在于,包括:防护装置(1)、温控装置(2)及上位机(3);所述防护装置(1)包括:包裹所述机器人并形成密闭空间的外防护组件(11)、多个螺旋状的导向气嚢(12)、多个支撑气嚢(13)以及所述外防护组件(11)外的风机(14);所述导向气嚢(12)和支撑气嚢(13)均位于所述封闭空间内,多个所述导向气嚢(12)分别对应所述机器人的各关节并连接所述外防护组件(11),多个所述支撑气嚢(13)均布在所述机器人臂梁的外周面并连接所述外防护组件(11);所述风机(14)为所述外防护组件(11)、导向气嚢(12)、支撑气嚢(13)充气;所述温控部件(2)包括温控箱(21)和与所述温控箱(21)连通的导液管(22);所述导向气嚢(12)朝向所述机器人侧开设有螺旋导向槽,所述导液管(22)在所述机器人的各关节处沿所述螺旋导向槽盘绕、在所述机器人的臂梁处沿所述外防护组件(11)内壁布设;所述风机(14)和温控箱(21)均电连接所述上位机(3)。
2.根据权利要求1所述的一种铸造件清理机器人智能安全辅助装备,其特征在于,所述外防护组件(11)包括多个防护气嚢(111)和多个弹性耐磨的连接件(112);多个所述防护气嚢(111)分别包裹在所述机器人臂梁的外侧,多个所述连接件(112)分别包裹在所述机器人的各关节处,多个所述防护气嚢(111)和多个所述连接件(112)相连接形成密闭空间。
3.根据权利要求2所述的一种铸造件清理机器人智能安全辅助装备,其特征在于,所述支撑气嚢(13)固设在所述防护气嚢(111)的内壁,所述支撑气嚢(13)充气后抵接所述机器人臂梁的外周面。
4.根据权利要求2所述的一种铸造件清理机器人智能安全辅助装备,其特征在于,所述连接件(112)采用聚氨酯pu材料。
5.根据权利要求1所述的一种铸造件清理机器人智能安全辅助装备,其特征在于,所述导向气嚢(12)的螺旋截面为半圆形,所述半圆形的直线朝向所述机器人。
6.根据权利要求1所述的一种铸造件清理机器人智能安全辅助装备,其特征在于,所述导液管(22)包括进液口(221)和出液口(222),所述温控箱(21)连接所述进液口(221)和出液口(222)形成回路;所述进液口(221)设有第一温度传感器(223)和第一压力传感器(224),所述出液口(222)设有第二温度传感器(225)和第二压力传感器(226),所述第一温度传感器(223)、第一压力传感器(224)、第二温度传感器(225)及第二压力传感器(226)均电连接所述上位机(3)。
7.根据权利要求1所述的一种铸造件清理机器人智能安全辅助装备,其特征在于,所述风机(14)与所述封闭空间之间设有第一送风管(141)连通,所述风机(14)与所述导向气嚢(12)之间设有第二送风管(142)连通,所述风机(14)与所述支撑气嚢(13)之间设有第三送风管(143)连通。
8.根据权利要求1所述的一种铸造件清理机器人智能安全辅助装备,其特征在于,所述外防护组件(11)内设有第三温度传感器(113)和第三压力传感器(114),所述第三温度传感器(113)和第三压力传感器(114)均无线连接所述上位机(3)。
9.根据权利要求1所述的一种铸造件清理机器人智能安全辅助装备,其特征在于,所述导向气嚢(12)内设有第四压力传感器,所述第四压力传感器无线连接所述上位机(3)。
10.根据权利要求1所述的一种铸造件清理机器人智能安全辅助装备,其特征在于,所述支撑气嚢(13)内设有第五压力传感器,所述第五压力传感器无线连接所述上位机(3)。
技术总结
本发明公开了一种铸造件清理机器人智能安全辅助装备,用于机器人防护;包括防护装置、温控装置及上位机;防护装置包括:包裹机器人并形成密闭空间的外防护组件、多个螺旋状的导向气嚢、多个支撑气嚢及风机;导向气嚢和支撑气嚢均位于封闭空间内,多个导向气嚢对应机器人各关节,多个支撑气嚢均布在机器人臂梁外周面;风机为外防护组件、导向气嚢、支撑气嚢充气;温控部件包括温控箱和导液管;导向气嚢开设螺旋导向槽,导液管在机器人各关节处沿螺旋导向槽盘绕、在机器人臂梁处沿外防护组件内壁布设;风机和温控箱均电连接上位机。本发明对整个密闭空间进行温度控制,解决远端部分温度调节不理想的问题;导液管能够随机器人动作而伸缩和扭动。
技术研发人员:秦兆伯,李炳萱,赵博,穆禹丞,于健,关颖,陈广泰
受保护的技术使用者:中车大连机车研究所有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!