工业机器人在线前瞻轨迹规划方法、电子设备及存储介质
本发明涉及机器人控制,尤其涉及一种工业机器人在线前瞻轨迹规划方法、电子设备及存储介质。
背景技术:
1、随着工业自动化水平的不断提升,工业机器人在现代机械制造中扮演着越来越重要的角色,尤其在复杂和恶劣环境下的工作场景中具有不可替代的作用。工业机器人的技术水平直接反映了国家的工业制造能力,而运行高速和加工高精度是衡量工业机器人性能的重要标准,也是市场所看重的关键要素。
2、现有的基于运动学的轨迹规划方法未充分考虑工业机器人在不同位形、不同负载下的动力学特性的差异。运动学轨迹规划仅仅关注工业机器人的运动学限制,这在低速和轻载情况下通常可以满足要求,但在工业机器人运行于高速重载状态下,可能存在较大的跟踪误差,因此,现有技术中存在运动精度和平滑性不足的问题。
技术实现思路
1、本发明实施例的主要目的在于提出一种工业机器人在线前瞻轨迹规划方法、电子设备及存储介质,能够对工业机器人运行精度、空间位置平滑度以及运行的安全性和平稳性有很大提高作用。
2、为实现上述目的,本发明实施例的第一方面提出了一种工业机器人在线前瞻轨迹规划方法,所述方法包括:
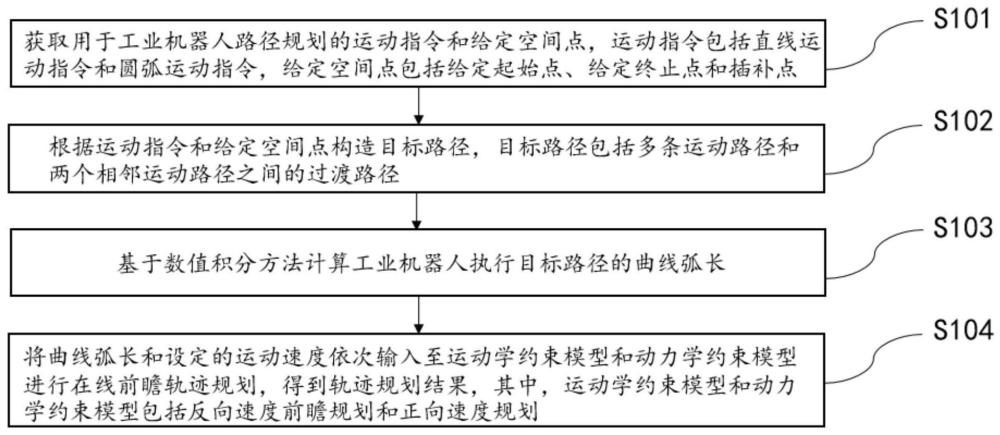
3、获取用于工业机器人路径规划的运动指令和给定空间点,所述运动指令包括直线运动指令和圆弧运动指令,所述给定空间点包括给定起始点、给定终止点和插补点;
4、根据所述运动指令和所述给定空间点构造目标路径,所述目标路径包括多条运动路径和两个相邻所述运动路径之间的过渡路径;
5、基于数值积分方法计算所述工业机器人执行所述目标路径的曲线弧长;
6、将所述曲线弧长和设定的运动速度依次输入至运动学约束模型和动力学约束模型进行在线前瞻轨迹规划,得到轨迹规划结果,其中,所述运动学约束模型和所述动力学约束模型包括反向速度前瞻规划和正向速度规划。
7、在一些实施例,所述运动路径包括直线路径和圆弧路径,所述过渡路径包括所述直线路径之间的过渡、所述圆弧路径之间的过渡、所述直线路径与所述圆弧路径之间的过渡。
8、在一些实施例,所述过渡路径的弧长的计算步骤如下:
9、根据所述过渡路径的过渡半径或过渡区大小确定过渡点和支持点;
10、根据所述过渡点和所述支持点构造hermite路径曲线;
11、基于数值积分方法计算所述hermite路径曲线的弧长,得到所述过渡路径的弧长。
12、在一些实施例,所述运动学约束模型中的反向速度前瞻规划具体为:假设所有所述运动指令的过渡区为不为零,则需构造n条直线或圆弧路径以及n-1条过渡路径,依次共组成最多有2n-1个元素的位置路径链表,每一段的最大速度是vmax,最大加速度是amax,1≤i≤n;首先从第m段开始,其末速度ve=0,以加速amax反向加速,能达到的最高速度为速度vmax,m,以ve=min(vm,vmax,m)作为第m-1段的末速度,如果ve≥vm-1,则第m-1段不需要处理,否则继续以加速amax反向加速,然后再取ve=min(vm-1,vmax,m-1),一直到第二段路径才结束,从而得到第一段路径的最大允许末速度为ve=min(v2,vmax,2),其中,第i段的最大可达速度的计算公式如下:
13、在一些实施例,所述运动学约束模型中的正向速度规划具体为:通过反向速度前瞻已经可以确保vm能降速到0,完成反向速度前瞻后,进而可对第一段进行正向的轨迹规划,令首速度为vs,末速度为ve,计算能达到的临界最大速度
14、在一些实施例,所述工业机器人的关节转矩和所述动力学约束模型、运动状态间的映射关系公式如下:
15、
16、其中,m(θ)是关节空间惯量矩阵,代表的是离心力和哥氏力矢量,g(θ)是重力矢量,jt(θ)是工业机器人末端雅可比的转置矩阵,是外部负载作用在机械臂末端的广义矢量,并且有以笛卡尔路径点相对于路径起始点的路径长度s为变量,将公式(1)转换成如下公式(2):
17、
18、由公式(2)转换成如下公式(3),得到工业机器人关节空间加速度公式:
19、
20、在一些实施例,所述动力学约束模型中的反向速度前瞻规划具体为:
21、步骤s1:已知n个离散笛卡尔路径点以及各路径点的速度值,令k:=n-1;
22、步骤s2:计算第k段路径始末点在关节转矩约束下的线加速度范围,并取交集部分作为第k段路径的加速度允许范围
23、步骤s3:以第k段路径始末点速度可达为前提计算相应的加速度ai,若ai在范围内,转至步骤s5:否则,执行下一步;
24、步骤s4:若令若则令计算式并更新首点速度
25、步骤s5:若k:=1,反向速度规划完毕;否则,令k:=k-1,并转至步骤s2。
26、在一些实施例,所述动力学约束模型中的正向速度规划具体为:
27、步骤k1:已知n个离散笛卡尔路径点以及各路径点的速度值,令k:=1;
28、步骤k2:计算第k段路径在关节转矩约束下的线加速度允许范围
29、步骤k3:若令若则令计算式求关节转矩约束下路径段末点的允许速度
30、步骤k4:若更新末点速度若更新末点速度
31、步骤k5:若k:=n-1,停止规划:否则,令k:=k+1,并转至步骤k2。
32、为实现上述目的,本发明实施例的第二方面提出了一种电子设备,所述电子设备包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时实现上述第一方面所述的方法。
33、为实现上述目的,本发明实施例的第三方面提出了一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现上述第一方面所述的方法。
34、本发明提出的工业机器人在线前瞻轨迹规划方法、电子设备及存储介质,通过获取用于工业机器人路径规划的运动指令和给定空间点,运动指令包括直线运动指令和圆弧运动指令,给定空间点包括给定起始点、给定终止点和插补点;根据运动指令和给定空间点构造目标路径,目标路径包括多条运动路径和两个相邻运动路径之间的过渡路径;基于数值积分方法计算工业机器人执行目标路径的曲线弧长;将曲线弧长和设定的运动速度依次输入至运动学约束模型和动力学约束模型进行在线前瞻轨迹规划,得到轨迹规划结果,其中,运动学约束模型和动力学约束模型包括反向速度前瞻规划和正向速度规划。基于此,本发明实施例的基于运动学约束和动力学约束的在线工业机器人在线前瞻轨迹规划方法,经运动学约束后再一次经动力学反馈约束,满足工业机器人力矩限制规划轨迹,进一步提高工业机器人的稳定性和可靠性,能够对工业机器人运行精度、空间位置平滑度以及运行的安全性和平稳性有很大提高作用,实现工业机器人运动的优化和控制,提升工业机器人的整体性能。
技术特征:
1.一种工业机器人在线前瞻轨迹规划方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述运动路径包括直线路径和圆弧路径,所述过渡路径包括所述直线路径之间的过渡、所述圆弧路径之间的过渡、所述直线路径与所述圆弧路径之间的过渡。
3.根据权利要求2所述的方法,其特征在于,所述过渡路径的弧长的计算步骤如下:
4.根据权利要求1所述的方法,其特征在于,所述运动学约束模型中的反向速度前瞻规划具体为:假设所有所述运动指令的过渡区为不为零,则需构造n条直线或圆弧路径以及n-1条过渡路径,依次共组成最多有2n-1个元素的位置路径链表,每一段的最大速度是vmax,最大加速度是amax,1≤i≤n;首先从第m段开始,其末速度ve=0,以加速amax反向加速,能达到的最高速度为速度vmax,m,以ve=min(vm,vmax,m)作为第m-1段的末速度,如果ve≥vm-1,则第m-1段不需要处理,否则继续以加速amax反向加速,然后再取ve=min(vm-1,vmax,m-1),一直到第二段路径才结束,从而得到第一段路径的最大允许末速度为ve=min(v2,vmax,2),其中,第i段的最大可达速度的计算公式如下:
5.根据权利要求1所述的方法,其特征在于,所述运动学约束模型中的正向速度规划具体为:通过反向速度前瞻已经可以确保vm能降速到0,完成反向速度前瞻后,进而可对第一段进行正向的轨迹规划,令首速度为vs,末速度为ve,计算能达到的临界最大速度
6.根据权利要求1所述的方法,其特征在于,所述工业机器人的关节转矩和所述动力学约束模型、运动状态间的映射关系公式如下:
7.根据权利要求1所述的方法,其特征在于,所述动力学约束模型中的反向速度前瞻规划具体为:
8.根据权利要求1所述的方法,其特征在于,所述动力学约束模型中的正向速度规划具体为:
9.一种电子设备,其特征在于,所述电子设备包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时实现权利要求1至8任一项所述的工业机器人在线前瞻轨迹规划方法。
10.一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现权利要求1至8中任一项所述的工业机器人在线前瞻轨迹规划方法。
技术总结
本发明实施例提供了一种工业机器人在线前瞻轨迹规划方法、电子设备及存储介质。该方法包括获取用于工业机器人路径规划的运动指令和给定空间点,运动指令包括直线运动指令和圆弧运动指令,给定空间点包括给定起始点、给定终止点和插补点;根据运动指令和给定空间点构造目标路径,目标路径包括多条运动路径和两个相邻运动路径之间的过渡路径;基于数值积分方法计算工业机器人执行目标路径的曲线弧长;将曲线弧长和设定的运动速度依次输入至运动学约束模型和动力学约束模型进行在线前瞻轨迹规划,得到轨迹规划结果,其中,运动学约束模型和动力学约束模型包括反向速度前瞻规划和正向速度规划。基于此,本发明实施例能够提高工业机器人的运行精度和运行平滑度。
技术研发人员:梁艳阳,石峰,孙伟霖,黄子健,钟铭溪,于子竣,黄永伟,吕洪妃,谢文轩
受保护的技术使用者:五邑大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!