一种智能工业机器人的制作方法
本发明涉及工业机器人领域,更具体的说是一种智能工业机器人。
背景技术:
1、工业机器人是面向工业领域的多关节机械手或多自由度的机器装置,它能自动执行工作,是靠自身动力和控制能力来实现各种功能的一种机器,它可以接受人类指挥,也可以按照预先编排的程序运行,现代的工业机器人还可以根据人工智能技术制定的原则纲领行动,工业机器人在工业生产中能代替人做某些单调、频繁和重复的长时间作业,或是危险、恶劣环境下的作业,例如在冲压、压力铸造、热处理、焊接、涂装、塑料制品成形、机械加工和简单装配等工序上,以及在原子能工业等部门中,完成对人体有害物料的搬运或工艺操作,在发达国家中,工业机器人自动化生产线成套设备已成为自动化装备的主流及未来的发展方向。国外汽车行业、电子电器行业、工程机械等行业已经大量使用工业机器人自动化生产线,以保证产品质量,提高生产效率,同时避免了大量的工伤事故。
2、在抓取物件时,工业机器人不能够对物件进行分析,只是简单的对物件进行搬运,过于用力会损坏物体,不用力则难以保证物件在运输过程中的稳定性。因此需要设计一种智能工业机器人。
技术实现思路
1、本发明提供一种智能工业机器人,目的是可以高效牢固的抓取物体,并防止抓取过程中物体损坏。
2、上述目的通过以下技术方案来实现:
3、所述支撑板上固接有外壳,外壳内部固接有内壳;内壳内滑动连接有两个滑块ⅰ,滑块ⅰ上均固接有齿条ⅰ,滑块ⅰ上设有能够使齿条ⅰ的方形孔;内壳上转动连接有转轴,转轴穿过支撑板、外壳和内壳,转轴上固接有齿轮ⅰ,齿轮ⅰ分别与两个齿条ⅰ啮合连接。
4、所述外壳上固接有电机,电机的输出轴固接在转轴上。
5、所述滑块ⅰ上固接有安装板ⅰ,每个安装板ⅰ的前后两侧均固接有支撑块,支撑块紧贴内壳和外壳之间。
6、所述内壳上固接有两个齿条ⅱ,每个支撑块上均转动连接有螺杆ⅰ,每个螺杆ⅰ上固接有齿轮ⅱ,每个齿轮ⅱ与对应的齿条ⅱ啮合连接。
7、所述每个螺杆ⅰ上转动连接有方形管,每个方形管内滑动连接有滑块ⅱ,滑块ⅱ与对应的螺杆ⅰ螺纹连接。
8、所述位于左侧的两个滑块ⅱ和位于右侧的两个滑块ⅱ上分别固接有滑板,每个滑板上均固接有四个弹簧件ⅰ,弹簧件ⅰ上固接有胶垫ⅰ。
9、所述位于左侧的两个螺杆ⅰ和位于右侧的两个螺杆ⅰ下方分别转动连接有固定板,固定板的下方滑动连接有底板,每个底板上固接有两个齿条ⅲ,每个螺杆ⅰ下方固接有齿轮ⅲ,每个齿轮ⅲ与对应的齿条ⅲ啮合连接。
10、所述转轴的下方固接有螺杆ⅱ,螺杆ⅱ的下方螺纹连接有螺筒,螺筒的下方固接有安装板ⅱ。
11、所述安装板ⅱ上固接有四个滑杆,支撑板的下方固接有四个滑筒,每个滑杆滑动连接在对应的滑筒中。
12、所述安装板ⅱ的下方固接有四个弹簧件ⅱ,弹簧件ⅱ的下方固接有胶垫ⅱ。
13、本发明一种智能工业机器人的有益效果为:
14、相较于传统的工业机器人,本发明通过齿轮ⅰ驱动两个齿条ⅰ以及滑块ⅰ向内移动,进而驱动两侧的胶垫ⅰ向内移动,从而对物体的左右两侧进行夹持;滑块ⅰ向内移动能够带动齿轮ⅱ204向内移动,并在齿条ⅱ205的作用下使得齿轮ⅱ204发生转动,进而带动螺杆ⅰ转动,从而驱动滑块ⅱ和滑板以及胶垫ⅰ向上移动,从而带动抓取的物体向上移动;螺杆ⅰ转动还能够带动齿轮ⅲ转动,从而驱动齿条ⅲ以及底板向内移动,完成从下方对物体的限制;本发明上方还设有胶垫ⅱ,进而从上方对物体进行固定,加强对物体抓取的稳固性。
技术特征:
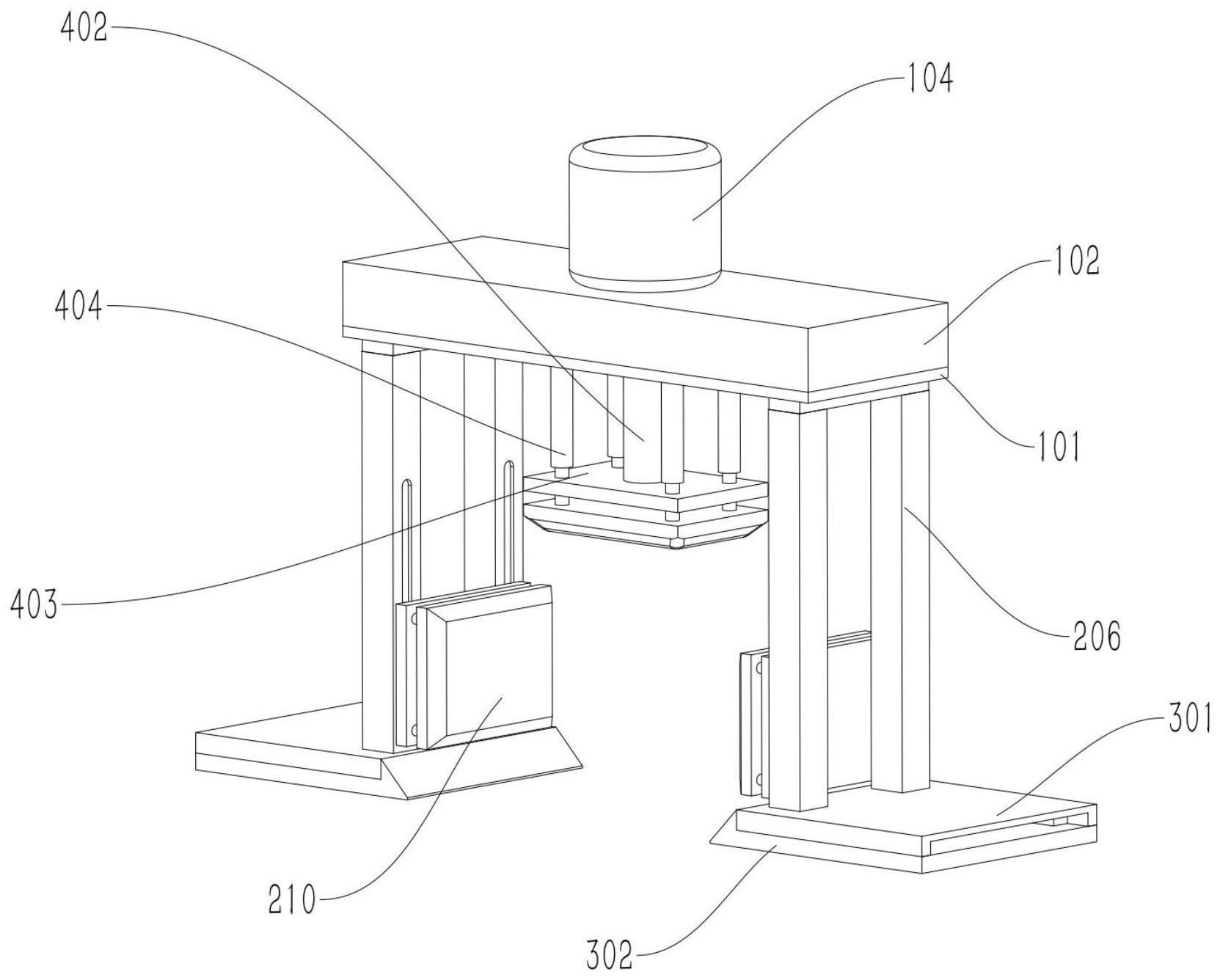
1.一种智能工业机器人,其特征在于,包括支撑板(101),所述支撑板(101)上固接有外壳(102),外壳(102)内部固接有内壳(103);内壳(103)内滑动连接有两个滑块ⅰ(105),每个滑块ⅰ(105)上均固接有齿条ⅰ(106),滑块ⅰ(105)上设有能够使齿条ⅰ(106)穿过的方形孔;内壳(103)上转动连接有转轴(107),转轴(107)穿过支撑板(101)、外壳(102)和内壳(103),转轴(107)上固接有齿轮ⅰ(108),齿轮ⅰ(108)分别与两个齿条ⅰ(106)啮合连接。
2.根据权利要求1所述的一种智能工业机器人,其特征在于,所述外壳(102)上固接有电机(104),电机(104)的输出轴固接在转轴(107)上。
3.根据权利要求1所述的一种智能工业机器人,其特征在于,所述滑块ⅰ(105)上固接有安装板ⅰ(201),每个安装板ⅰ(201)的前后两侧均固接有支撑块(202),支撑块(202)紧贴内壳(103)和外壳(102)之间。
4.根据权利要求3所述的一种智能工业机器人,其特征在于,所述内壳(103)上固接有两个齿条ⅱ(205),每个支撑块(202)上均转动连接有螺杆ⅰ(203),每个螺杆ⅰ(203)上固接有齿轮ⅱ(204),每个齿轮ⅱ(204)与对应的齿条ⅱ(205)啮合连接。
5.根据权利要求4所述的一种智能工业机器人,其特征在于,所述每个螺杆ⅰ(203)上转动连接有方形管(206),每个方形管(206)内滑动连接有滑块ⅱ(207),滑块ⅱ(207)与对应的螺杆ⅰ(203)螺纹连接。
6.根据权利要求5所述的一种智能工业机器人,其特征在于,所述位于左侧的两个滑块ⅱ(207)和位于右侧的两个滑块ⅱ(207)上分别固接有滑板(208),每个滑板(208)上均固接有四个弹簧件ⅰ(209),弹簧件ⅰ(209)上固接有胶垫ⅰ(210)。
7.根据权利要求6所述的一种智能工业机器人,其特征在于,所述位于左侧的两个螺杆ⅰ(203)和位于右侧的两个螺杆ⅰ(203)下方分别转动连接有固定板(301),固定板(301)的下方滑动连接有底板(302),每个底板(302)上固接有两个齿条ⅲ(304),每个螺杆ⅰ(203)下方固接有齿轮ⅲ(303),每个齿轮ⅲ(303)与对应的齿条ⅲ(304)啮合连接。
8.根据权利要求1所述的一种智能工业机器人,其特征在于,所述转轴(107)的下方固接有螺杆ⅱ(401),螺杆ⅱ(401)的下方螺纹连接有螺筒(402),螺筒(402)的下方固接有安装板ⅱ(403)。
9.根据权利要求8所述的一种智能工业机器人,其特征在于,所述安装板ⅱ(403)上固接有四个滑杆(405),支撑板(101)的下方固接有四个滑筒(404),每个滑杆(405)滑动连接在对应的滑筒(404)中。
10.根据权利要求9所述的一种智能工业机器人,其特征在于,所述安装板ⅱ(403)的下方固接有四个弹簧件ⅱ(406),弹簧件ⅱ(406)的下方固接有胶垫ⅱ(407)。
技术总结
本发明涉及工业机器人领域,更具体的说是一种智能工业机器人。相较于传统的工业机器人,本发明通过齿轮Ⅰ驱动两个齿条Ⅰ以及滑块Ⅰ向内移动,进而驱动两侧的胶垫Ⅰ向内移动,从而对物体的左右两侧进行夹持;滑块Ⅰ向内移动能够带动齿轮Ⅱ204向内移动,并在齿条Ⅱ205的作用下使得齿轮Ⅱ204发生转动,进而带动螺杆Ⅰ转动,从而驱动滑块Ⅱ和滑板以及胶垫Ⅰ向上移动,从而带动抓取的物体向上移动;螺杆Ⅰ转动还能够带动齿轮Ⅲ转动,从而驱动齿条Ⅲ以及底板向内移动,完成从下方对物体的限制;本发明上方还设有胶垫Ⅱ,进而从上方对物体进行固定,加强对物体抓取的稳固性。
技术研发人员:丁志成
受保护的技术使用者:丁志成
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!