一种实现自动标定激光雷达安装位置的方法及系统与流程
本发明属于智能机器人的自主定位与导航控制领域,具体涉及一种实现自动标定激光雷达安装位置的方法及系统。
背景技术:
1、激光雷达是机器人采用激光雷达slam定位方式实现自主导航的主传感器。激光雷达的安装角度对激光雷达的定位结果有很大影响。在激光雷达slam导航时,经常出现由于激光雷达安装角度没有标定,导致机器人在停车点控制精度不高,出现偏向一边的情况。目前,解决该问题的一般方法是手动对激光雷达的安装误差进行多次标定,观察导航控制精度是否改善。手动标定方式耗时太长,而且受导航控制参数影响,标定结果可能有偏差。
2、本发明提出的自动标定激光雷达安装位置的方法,有效解决了这个问题。
技术实现思路
1、要解决的技术问题:
2、为了避免现有技术的不足之处,本发明提供一种实现自动标定激光雷达安装位置的方法,通过上位机软件遥控机器人从a点到b点走一定长度的直线。a点到b点的路径方向是机器人行驶时的车头方向。上位机得到的一组实时车体角度值,是激光雷达的方向。激光雷达的方向和车头的方向之差,即为激光雷达在机器人上的安装角度。本发明解决了手动标定方式耗时太长,而且受导航控制参数影响,标定结果可能有偏差等问题。
3、本发明的技术方案是:一种实现自动标定激光雷达安装位置的方法,具体步骤如下:
4、通过激光雷达扫描得到三维点云地图;
5、通过导航计算机进行激光雷达定位算法,得到机器人当前在地图坐标系下的位置和角度;
6、通过上位机软件控制机器人走一段a点到b点的直线,得到的一组实时车体角度值,即得到实时激光雷达定位的角度;
7、对激光雷达定位的角度进行均值滤波;
8、将所得结果与a点到b的路径的方向进行比较,所得差值即为激光雷达的安装角度。
9、本发明的进一步技术方案是:所述激光雷达定位算法结合3d点云匹配算法和ukf数据融合算法,能够为移动机器人提供停车精度1cm的定位信息和精度1°的角度信息。
10、本发明的进一步技术方案是:所述机器人走a点到b点的直线的长度至少10米,速度不大于0.5m/s。
11、本发明的进一步技术方案是:所述上位机软件实时获取机器人的位置信息,获取频率不小于5hz。
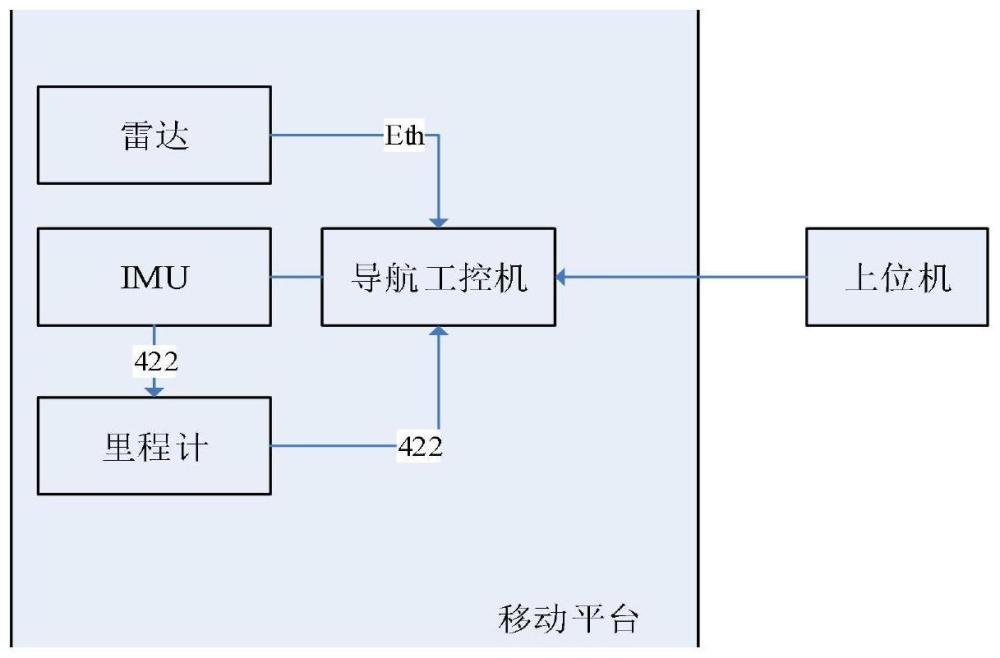
12、一种实现自动标定激光雷达安装位置的系统,包括三维激光雷达、导航计算机、imu、里程计、上位机,通过激光雷达扫描得到三维点云地图;通过导航计算机采集激光雷达点云数据、执行slam导航算法;通过imu测量实时车体角度值;通过里程计测量机器人行程;通过上位机采集导航计算机的定位信息,执行激光雷达安装位置自动标定算法。
13、本发明的进一步技术方案是:所述导航计算机,尺寸小于208mmx148mmx60mm,功耗小于30w,2.4ghz以上cpu主频,具备2个100m网络通信接口,具有rs232通信接口,工作温度范围-40°~65°,能够通过网口采集激光雷达点云数据,能够执行slam导航算法,能够执行导航控制算法,能够通过tcp/ip接口向运动控制器发送自动导航指令。
14、本发明的进一步技术方案是:所述上位机为2.4ghz以上cpu主频,具备2个100m网络通信接口,工作温度范围-20°~65°,能够通过网口采集导航计算机的定位信息,能够执行激光雷达安装位置自动标定算法。
15、本发明的进一步技术方案是:所述三维激光雷达为16线,水平视场角为360°,垂直视场角30°,即-15°—+15°,激光发散角为水平1.6mrad、垂直6.9mrad,水平角分辨率0.2°,垂直角分辨率为2°,测距能力为150m,精度为±2cm,盲区≤0.2m,帧率为10hz/20hz。
16、本发明的进一步技术方案是:所述imu的动态精度为0.5°,静态精度为0.01°,测量范围为俯仰±90°、横滚±180度,航向保持精度为0.3°/60s,分辨力为0.01°/sec,全温零偏稳定性:20°/h。
17、一种电子设备,包括至少一个处理器,以及所述至少一个处理器通信连接的存储器;其中,所述存储器存储有可被所述至少一个处理器执行的计算机程序,所述计算机程序被所述至少一个处理器执行,以使所述至少一个处理器能够执行所述实现自动标定激光雷达安装位置的方法。
18、有益效果
19、本发明的有益效果在于:本发明通过导航计算机进行激光雷达定位算法,得到机器人当前在地图坐标系下的位置和角度;再通过上位机软件控制机器人走一段a点到b点的直线,得到的一组实时车体角度值,即得到实时激光雷达定位的角度;再对激光雷达定位的角度进行均值滤波;将所得结果与a点到b的路径的方向进行比较,所得差值即为激光雷达的安装角度。实现了激光雷达安装位置的自动标定,且标定精度满足要求,能够改善导航控制精度。
技术特征:
1.一种实现自动标定激光雷达安装位置的方法,其特征在于具体步骤如下:
2.根据权利要求1所述一种实现自动标定激光雷达安装位置的方法,其特征在于:所述激光雷达定位算法结合3d点云匹配算法和ukf数据融合算法,能够为移动机器人提供停车精度1cm的定位信息和精度1°的角度信息。
3.根据权利要求1所述一种实现自动标定激光雷达安装位置的方法,其特征在于:所述机器人走a点到b点的直线的长度至少10米,速度不大于0.5m/s。
4.根据权利要求1所述一种实现自动标定激光雷达安装位置的方法,其特征在于:所述上位机软件实时获取机器人的位置信息,获取频率不小于5hz。
5.一种实现自动标定激光雷达安装位置的系统,其特征在于:用于实施权利要求1-4任一项所述实现自动标定激光雷达安装位置的系统;包括三维激光雷达、导航计算机、imu、里程计、上位机,通过激光雷达扫描得到三维点云地图;通过导航计算机采集激光雷达点云数据、执行slam导航算法;通过imu测量实时车体角度值;通过里程计测量机器人行程;通过上位机采集导航计算机的定位信息,执行激光雷达安装位置自动标定算法。
6.根据权利要求5所述一种实现自动标定激光雷达安装位置的系统,其特征在于:所述导航计算机,尺寸小于208mmx148mmx60mm,功耗小于30w,2.4ghz以上cpu主频,具备2个100m网络通信接口,具有rs232通信接口,工作温度范围-40°~65°,能够通过网口采集激光雷达点云数据,能够执行slam导航算法,能够执行导航控制算法,能够通过tcp/ip接口向运动控制器发送自动导航指令。
7.根据权利要求5所述一种实现自动标定激光雷达安装位置的系统,其特征在于:所述上位机为2.4ghz以上cpu主频,具备2个100m网络通信接口,工作温度范围-20°~65°,能够通过网口采集导航计算机的定位信息,能够执行激光雷达安装位置自动标定算法。
8.根据权利要求5所述一种实现自动标定激光雷达安装位置的系统,其特征在于:所述三维激光雷达为16线,水平视场角为360°,垂直视场角30°,即-15°—+15°,激光发散角为水平1.6mrad、垂直6.9mrad,水平角分辨率0.2°,垂直角分辨率为2°,测距能力为150m,精度为±2cm,盲区≤0.2m,帧率为10hz/20hz。
9.根据权利要求5所述一种实现自动标定激光雷达安装位置的系统,其特征在于:所述imu的动态精度为0.5°,静态精度为0.01°,测量范围为俯仰±90°、横滚±180度,航向保持精度为0.3°/60s,分辨力为0.01°/sec,全温零偏稳定性:20°/h。
10.一种电子设备,其特征在于:包括至少一个处理器,以及所述至少一个处理器通信连接的存储器;其中,所述存储器存储有可被所述至少一个处理器执行的计算机程序,所述计算机程序被所述至少一个处理器执行,以使所述至少一个处理器能够执行权利要求1-4任一项所述实现自动标定激光雷达安装位置的方法。
技术总结
本发明一种实现自动标定激光雷达安装位置的方法及系统,属于智能机器人的自主定位与导航控制领域;方法步骤为:通过激光雷达扫描得到三维点云地图;通过导航计算机进行激光雷达定位算法,得到机器人当前在地图坐标系下的位置和角度;通过上位机软件控制机器人走一段A点到B点的直线,得到的一组实时车体角度值,即得到实时激光雷达定位的角度;对激光雷达定位的角度进行均值滤波;将所得结果与A点到B的路径的方向进行比较,所得差值即为激光雷达的安装角度。本发明解决了手动标定方式耗时太长,而且受导航控制参数影响,标定结果可能有偏差等问题。
技术研发人员:徐颖,卢光旭,冯建威
受保护的技术使用者:中国航空工业集团公司洛阳电光设备研究所
技术研发日:
技术公布日:2024/1/25
- 还没有人留言评论。精彩留言会获得点赞!