一种机械手臂路线自动修正方法与流程
本发明涉及机械手臂控制,尤其涉及一种机械手臂路线自动修正方法。
背景技术:
1、机械手臂用于对产品进行取、放等操作,应用时机械手臂将原料从料盘中取出,进一步的放入设备的卡槽中进行加工,加工完成后,再将成品取出,放回原料盘。在整个过程中执行的目标位置是人为示教出来的固定点位(即机械手臂移动到设定的位置)。当加工设备存在精度问题、目标点位示教存在偏差或者产品摆放不正时,机械手臂运行至目标点位后夹、放产品会出现夹偏、夹漏或者放置产品时出现位置不当、放不进加工卡槽等问题。
2、出现这种问题后,系统因某些机制检测可能会报警停机,再手动下将机械手臂调至安全区域,再将原料重新摆放或者跳过当前原料,重新启动进行生产;或者将夹取不正的原料放入到加工设备中进行加工,上述动作会导致成品率下降。无论是报警停机,还是产生不良品,都会降低效率,浪费成本。
技术实现思路
1、本发明提供了一种机械手臂路线自动修正方法,用以解决现有技术中出现的上述问题。
2、为了解决上述问题,本发明提供了一种机械手臂路线自动修正方法,包括:
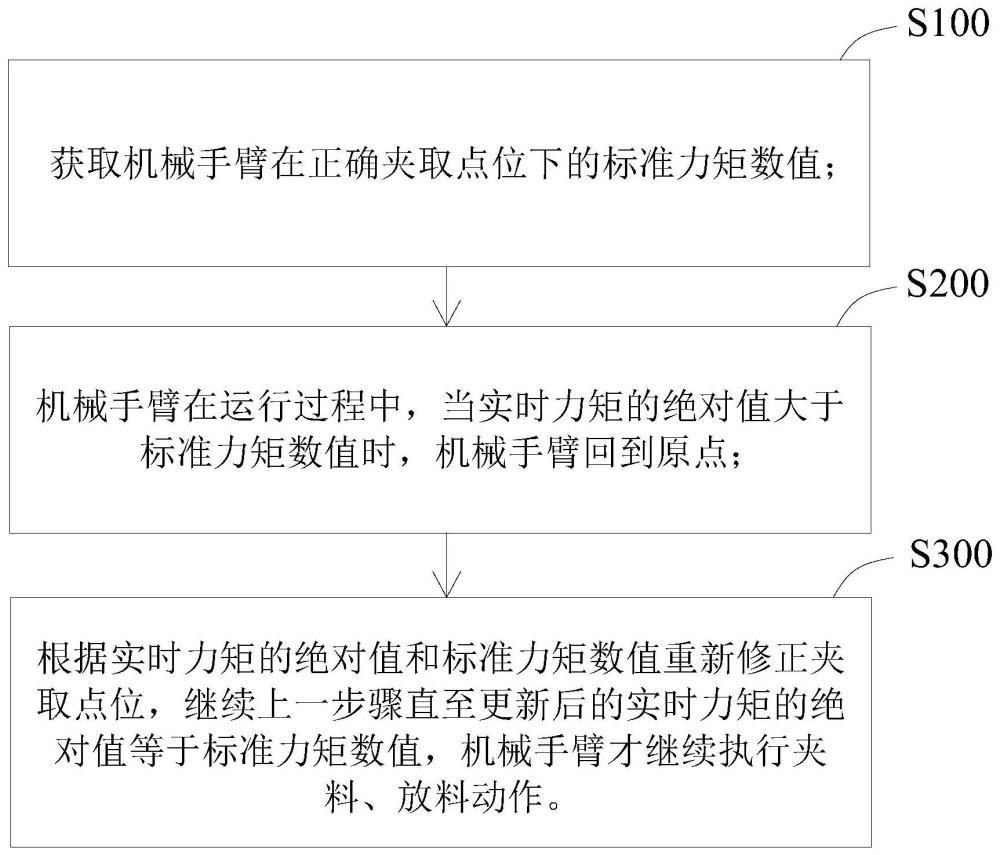
3、获取机械手臂在正确夹取点位下的标准力矩数值;
4、机械手臂在运行过程中,当实时力矩的绝对值大于标准力矩数值时,机械手臂回到原点;
5、根据实时力矩的绝对值和标准力矩数值重新修正夹取点位,继续上一步骤直至更新后的实时力矩的绝对值等于标准力矩数值,机械手臂才继续执行夹料、放料动作。
6、在一种优选的实施方式中,所述根据实时力矩的绝对值和标准力矩数值重新修正夹取点位包括:
7、采集机械手臂的多个标准力矩数值,取平均值;
8、当实时力矩的绝对值大于标准力矩数值时,对实时力矩的进行多次读取,取平均值;
9、设定单位修正量,将适配比例的修正量追加到实时力矩中,直至更新后的实时力矩的绝对值等于标准力矩数值,机械手臂才继续执行夹料、放料动作。
10、在一种优选的实施方式中,在所述设定单位修正量之前,判断实时力矩的方向,实时力矩的方向设定为正方向1和负方向-1。
11、在一种优选的实施方式中,当实时力矩的方向为正方向时,所述适配的修正量等于第一差值与标准力矩数值的比值乘以单位修正量,再乘以负方向-1,所述第一差值为实时力矩的绝对值与标准力矩数值的差值。
12、在一种优选的实施方式中,当实时力矩的方向为负方向时,所述适配的修正量等于第二差值与标准力矩数值的比值乘以单位修正量,再乘以正方向1,所述第二差值为实时力矩的绝对值与标准力矩数值的差值。
13、本发明的有益效果是:本发明提出一种机械手臂路线自动修正方法,该方法能够根据产品位置实时更新机械手臂的夹取点位,进而能够适配产品的实时位置,能够有效的避免机械手臂出现夹偏、夹漏或者放置产品时出现位置不当、产品放不进加工卡槽等问题,极大的提升了机械手臂作业的精度和效率。
技术特征:
1.一种机械手臂路线自动修正方法,其特征在于,包括:
2.根据权利要求1所述的机械手臂路线自动修正方法,其特征在于,所述根据实时力矩的绝对值和标准力矩数值重新修正夹取点位包括:
3.根据权利要求2所述的机械手臂路线自动修正方法,其特征在于,在所述设定单位修正量之前,判断实时力矩的方向,实时力矩的方向设定为正方向1和负方向-1。
4.根据权利要求3所述的机械手臂路线自动修正方法,其特征在于,当实时力矩的方向为正方向时,所述适配的修正量等于第一差值与标准力矩数值的比值乘以单位修正量,再乘以负方向-1,所述第一差值为实时力矩的绝对值与标准力矩数值的差值。
5.根据权利要求3所述的机械手臂路线自动修正方法,其特征在于,当实时力矩的方向为负方向时,所述适配的修正量等于第二差值与标准力矩数值的比值乘以单位修正量,再乘以正方向1,所述第二差值为实时力矩的绝对值与标准力矩数值的差值。
技术总结
本发明涉及机械手臂控制技术领域,尤其涉及一种机械手臂路线自动修正方法。该方法包括获取机械手臂在正确夹取点位下的标准力矩数值;机械手臂在运行过程中,当实时力矩的绝对值大于标准力矩数值时,机械手臂回到动作起始原点;根据实时力矩的绝对值和标准力矩数值重新修正夹取点位。使得能够实时更新机械手臂的夹取点位以满足与产品位置之间的匹配,进而能够有效避免机械手臂出现夹偏、夹漏或者放置产品时出现位置不当、产品放不进加工卡槽等问题,极大的提升了机械手臂作业的精度和效率。
技术研发人员:邓进锋,章林,何倩倩,宋鹏程
受保护的技术使用者:朗宇芯科技(佛山)有限公司
技术研发日:
技术公布日:2024/2/1
- 还没有人留言评论。精彩留言会获得点赞!