一种应用于机器人回工作站时的行为驱动方法与流程
本发明涉及智能机器人,具体是一种应用于机器人回工作站时的行为驱动方法。
背景技术:
1、随着科技的发展,家用清扫设备经历了手持吸尘器、洗拖一体机、有牵引力的洗拖一体机、洗拖一体机器人;商用清扫经历了手动洗拖一体机、半自动洗拖一体机和全自动洗拖一体机。清洁机器人的“独立”能力越来越强,现阶段的清洁机器人几乎不需要人工干预,便能完成7x24小时无人值守定时清洁任务。可以自主加水、自主排污、自主充电、自主唤醒,自动完成清洁任务。而自主回站充电、加水、排污是是否能完成真无人值守的重要一环。
2、对于自主回站功能,目前市面上采用的是地图导航+图像识别+工作站交互方式,先地图导航机器人到工作站正前方,再图像识别到工作站,然后驱动电机缓慢进站,在机器人接触到充电站时,通过接触点完成信息交互,锁住电机,完成回站功能。
3、机器人回桩依赖最初建图时所标注的工作站位置,(初始点标为a点),若工作站被左右移动了(移动后的点标为b点),那么再回工作站时,机器人还是会回到最初工作站(a点)的正前方,而非现在位置(b点)的正前方。这样会对下一步对桩操作造成影响,因为机器人不在工作站的中轴线上,再对桩时会产生一个角度,机器人回站时是斜着驶向工作站的,而非正面对着过去,导致工作站上外凸的加水和排水槽和机器人加排水孔会有斜向的作用力,此力会使工作站侧倾甚至被推起,反作用力最终作用到轮毂电机上,若此时机器人和工作站完成握手,锁住轮毂电机,则轮毂电机上的负载增加,此负载会使电机温度增加,甚至产生超温保护,频繁如此会有电机消磁或烧毁电机的可能。当电机过温保护后,机器在反作用力的作用下,会被工作站“推出”,而此时正在充电和加排水,加水和排水水路无法立即关闭,造成水流溅到机器人和充电站电级片上,造成潜在危险。轮毂电机和充电级片寿命大大减少,无形中增加了售后成本。此外工作站中和机器人通信的主板失灵,将可能导致机器死怼工作站,造成破坏。上述多重原因会造成回站成功率降低,影响工作效率,发生任何一种都必然影响客户对产品的信任度。
4、因此,我们提出了一种应用于机器人回工作站时的行为驱动方法来解决上述所提到的问题。
技术实现思路
1、本发明的目的在于提供一种应用于机器人回工作站时的行为驱动方法,以解决上述背景技术中提出的问题。
2、为实现上述目的,本发明提供如下技术方案:
3、一种应用于机器人回工作站时的行为驱动方法,包括以下步骤:
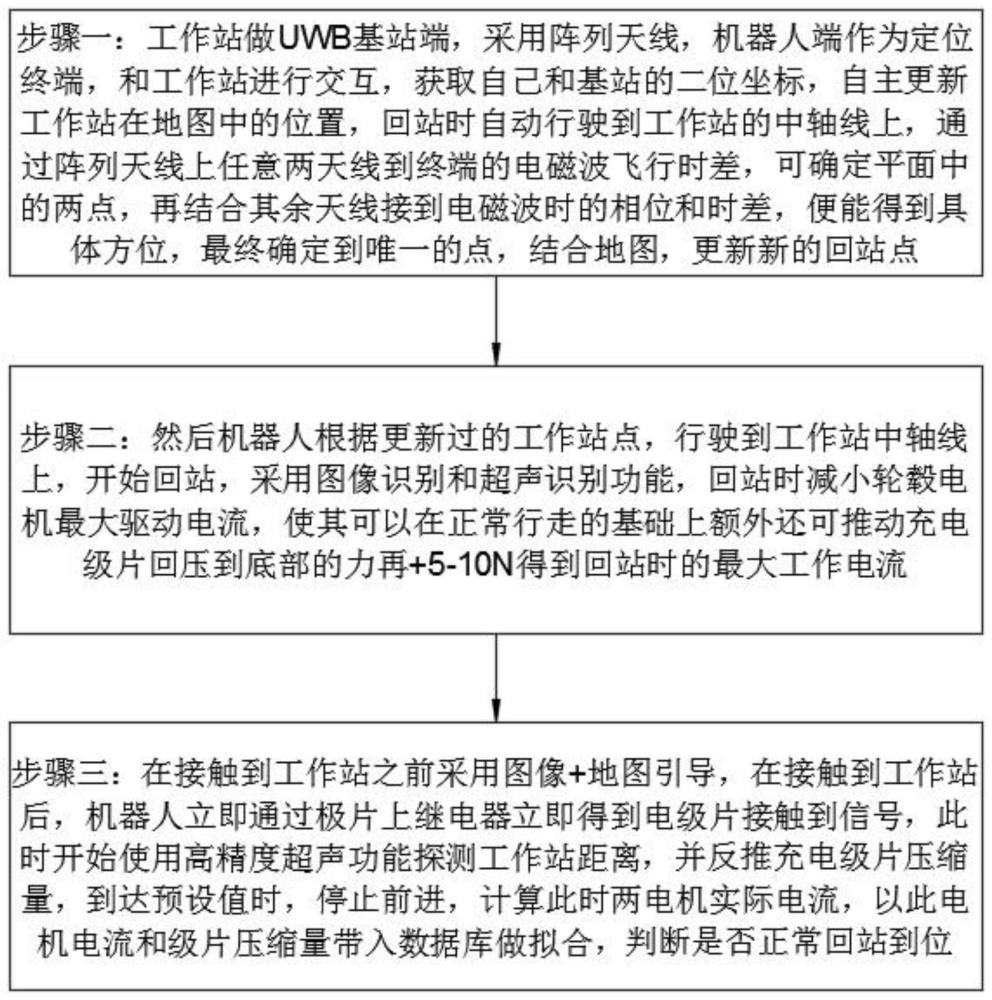
4、步骤一:工作站做uwb基站端,采用阵列天线,机器人端作为定位终端,和工作站进行交互,获取自己和基站的二位坐标,自主更新工作站在地图中的位置,回站时自动行驶到工作站的中轴线上,通过阵列天线上任意两天线到终端的电磁波飞行时差,可确定平面中的两点,再结合其余天线接到电磁波时的相位和时差,便能得到具体方位,最终确定到唯一的点,结合地图,更新新的回站点;
5、步骤二:然后机器人根据更新过的工作站点,行驶到工作站中轴线上,开始回站,采用图像识别和超声识别功能,回站时减小轮毂电机最大驱动电流,使其可以在正常行走的基础上额外还可推动充电级片回压到底部的力再+5-10n得到回站时的最大工作电流;
6、步骤三:在接触到工作站之前采用图像+地图引导,在接触到工作站后,机器人立即通过极片上继电器立即得到电级片接触到信号,此时开始使用高精度超声功能探测工作站距离,并反推充电级片压缩量,到达预设值时,停止前进,计算此时两电机实际电流,以此电机电流和级片压缩量带入数据库做拟合,判断是否正常回站到位。
7、作为本发明进一步的方案:所述数据库为前期大量实验数据做的数据库。
8、作为本发明进一步的方案:所述图像识别功能通过图像识别模型进行图像识别,所述图像识别模型的训练方法包括:获取初始训练图像,对初始训练图像进行图像信号处理的增广处理,得到处理后的训练图像;基于处理后的训练图像来训练图像识别模型。
9、作为本发明进一步的方案:所述对初始训练图像进行图像信号处理的增广处理,包括:对初始训练图像进行以下处理中的至少一项:rgb域增广处理、hsv域增广处理以及yuv域增广处理。
10、作为本发明进一步的方案:所述rgb域增广处理包括色彩信息调整、伽马变换以及随机直方图均衡化中的至少一项;其中,色彩信息调整中采用的色彩校正矩阵和偏置矩阵中的参数均是根据随机变量对预设参数进行微调而得到的;伽马变换中采用的伽马系数是根据随机变量对预设参数进行微调而得到的;随机直方图均衡化是指基于随机变量确定是否进行直方图均衡化。
11、作为本发明进一步的方案:所述当rgb域增广处理包括色彩信息调整、伽马变换以及随机直方图均衡化中的至少两项时,色彩信息调整在伽马变换之前执行,伽马变换在随机直方图均衡化之前执行。
12、作为本发明进一步的方案:所述hsv域增广处理包括饱和度调整和/或对比度调整;其中,饱和度调整中采用的饱和度参数是根据随机变量对预设参数进行微调而得到的,对比度调整中采用的对比度参数是根据随机变量对预设参数进行微调而得到的。
13、作为本发明进一步的方案:所述yuv域增广处理包括yuv域降噪和/或边缘增强;其中,yuv域降噪中采用的低通滤波器的参数是根据随机变量对预设参数进行微调而得到的,边缘增强中采用的参数是根据随机变量对预设参数进行微调而得到的。
14、作为本发明进一步的方案:所述超声识别功能在识别时包括获取超声检测信号。
15、作为本发明再进一步的方案:所述超声检测信号为对超声传感器感测的超声信号进行声电转换后得到的电信号,在将超声检测信号分解为指定数量的等带宽的信号分量之前还包括:对超声检测信号进行滤波处理,得到滤波后的超声检测信号;相应的,将超声检测信号分解为指定数量的等带宽的信号分量为:将滤波后的超声检测信号分解为指定数量的等带宽的信号分量。
16、与现有技术相比,本发明的有益效果是:
17、1、杜绝怼坏工作站可能。
18、2、延长电机、充电电极寿命,减少加排水槽\孔寿磨损。
19、3、降低工作站待机功耗。
20、4、增加回站成功率和可靠性。
技术特征:
1.一种应用于机器人回工作站时的行为驱动方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的一种应用于机器人回工作站时的行为驱动方法,其特征在于,所述数据库为前期大量实验数据做的数据库。
3.根据权利要求1所述的一种应用于机器人回工作站时的行为驱动方法,其特征在于,所述图像识别功能通过图像识别模型进行图像识别,所述图像识别模型的训练方法包括:获取初始训练图像,对初始训练图像进行图像信号处理的增广处理,得到处理后的训练图像;基于处理后的训练图像来训练图像识别模型。
4.根据权利要求3所述的一种应用于机器人回工作站时的行为驱动方法,其特征在于,所述对初始训练图像进行图像信号处理的增广处理,包括:对初始训练图像进行以下处理中的至少一项:rgb域增广处理、hsv域增广处理以及yuv域增广处理。
5.根据权利要求4所述的一种应用于机器人回工作站时的行为驱动方法,其特征在于,所述rgb域增广处理包括色彩信息调整、伽马变换以及随机直方图均衡化中的至少一项;其中,色彩信息调整中采用的色彩校正矩阵和偏置矩阵中的参数均是根据随机变量对预设参数进行微调而得到的;伽马变换中采用的伽马系数是根据随机变量对预设参数进行微调而得到的;随机直方图均衡化是指基于随机变量确定是否进行直方图均衡化。
6.根据权利要求5所述的一种应用于机器人回工作站时的行为驱动方法,其特征在于,所述当rgb域增广处理包括色彩信息调整、伽马变换以及随机直方图均衡化中的至少两项时,色彩信息调整在伽马变换之前执行,伽马变换在随机直方图均衡化之前执行。
7.根据权利要求4所述的一种应用于机器人回工作站时的行为驱动方法,其特征在于,所述hsv域增广处理包括饱和度调整和/或对比度调整;其中,饱和度调整中采用的饱和度参数是根据随机变量对预设参数进行微调而得到的,对比度调整中采用的对比度参数是根据随机变量对预设参数进行微调而得到的。
8.根据权利要求4所述的一种应用于机器人回工作站时的行为驱动方法,其特征在于,所述yuv域增广处理包括yuv域降噪和/或边缘增强;其中,yuv域降噪中采用的低通滤波器的参数是根据随机变量对预设参数进行微调而得到的,边缘增强中采用的参数是根据随机变量对预设参数进行微调而得到的。
9.根据权利要求1所述的一种应用于机器人回工作站时的行为驱动方法,其特征在于,所述超声识别功能在识别时包括获取超声检测信号。
10.根据权利要求9所述的一种应用于机器人回工作站时的行为驱动方法,其特征在于,所述超声检测信号为对超声传感器感测的超声信号进行声电转换后得到的电信号,在将超声检测信号分解为指定数量的等带宽的信号分量之前还包括:对超声检测信号进行滤波处理,得到滤波后的超声检测信号;相应的,将超声检测信号分解为指定数量的等带宽的信号分量为:将滤波后的超声检测信号分解为指定数量的等带宽的信号分量。
技术总结
本发明公开了一种应用于机器人回工作站时的行为驱动方法,包括以下步骤:机器人端作为定位终端,和工作站进行交互,获取自己和基站的二位坐标,自主更新工作站在地图中的位置,结合地图,更新新的回站点;然后机器人根据更新过的工作站点,开始回站;在接触到工作站后,机器人立即通过极片上继电器立即得到电级片接触到信号,此时开始使用高精度超声功能探测工作站距离,并反推充电级片压缩量,到达预设值时,计算此时两电机实际电流,以此电机电流和级片压缩量带入数据库做拟合,判断是否正常回站到位;杜绝怼坏工作站可能;延长电机、充电电极寿命,减少加排水槽\孔寿磨损;降低工作站待机功耗;增加回站成功率和可靠性。
技术研发人员:徐礼勤,季明清
受保护的技术使用者:霞智科技有限公司
技术研发日:
技术公布日:2024/2/21
- 还没有人留言评论。精彩留言会获得点赞!