一种具有自动巡检功能的机器人的制作方法
本发明涉及机器人,更具体地说,涉及一种具有自动巡检功能的机器人。
背景技术:
1、目前,在国内的实验动物房屏障区的饲养间,针对ivc系统,饲养员需要进行的工作通常有巡检、换笼、换饮水瓶、添加饲料等,其中以巡检环节最为繁琐。
2、巡检工作存在着性质单一、重复性大的特点,易使人产生疲劳感,工作效果受饲养员的责任心、工作方法、情绪等影响较大。巡检工作重复性高,以使巡检人员容易忽视细节,对于细致末梢的问题难以发现,巡检人员频繁进出屏障区会对屏障区内的实验动物带来风险,笼盒过多导致巡视检查劳动量大,巡视检查速度慢,巡视检查过程巡检人员难免带入主观情绪,可能会影响实验动物的实验结果。
3、因此,如何解决人工巡视检查笼盒效率低的问题,是目前本领域技术人员亟待解决的问题。
技术实现思路
1、有鉴于此,本发明的目的是提供一种具有自动巡检功能的机器人,该机器人可以代替饲养员进行巡检工作,巡检完毕后可自动生成巡检报告,可以节约劳动力,提高工作效率;当实验人员有观察某个笼盒小鼠状态的需求时,可以使用该机器人的手动巡检功能巡视指定笼盒,减少了实验人员进出屏障区的复杂流程,为实验人员带来便捷。
2、为了实现上述目的,本发明提供如下技术方案:
3、一种具有自动巡检功能的机器人,包括:
4、可移动底盘,可移动底盘的顶部设有支座,可移动底盘设有控制自身移动的控制器和驱动器;
5、二次开发平台,通过紧固件固定于支座;
6、主体框架,通过紧固件与二次开发平台连接,主体框架设有固定板,固定板上设有固定角铁,固定角铁用于固定工控机;
7、升降机构,固定于固定板,升降机构设有滑块,滑块用于固定摄像头安装组焊;
8、摄像装置,通过肘节连接板与角度调节组件连接,角度调节组件与电缸连接,电缸固定于摄像头安装组焊。
9、优选的,可移动底盘包括:
10、底板,底板设有支座,控制器和驱动器设于底板;
11、电源,设于底板;
12、雷达,设有两个,两个雷达设于底板的斜对角;
13、脚轮,设有两个,两个脚轮对称设于底板的两侧;
14、辅助脚轮,设有四个,四个脚轮均匀设于底板的两侧,以使底板同一侧的辅助脚轮设于脚轮的两端。
15、优选的,支座设有四个,四个支座设于底板的四个拐角,四个支座均设有第一螺纹孔,第一螺纹孔通过紧固件固定二次开发平台。
16、优选的,二次开发平台包括:
17、固定方钢,固定方钢上设有圆孔和长条孔,固定方钢通过紧固件固定支座;
18、第一外罩固定方钢,设有多个,多个第一外罩固定方钢设于固定方钢的侧面,第一外罩固定方钢用于固定外罩;
19、安装板,固定于固定方钢的顶部,安装板与第一外罩固定方钢平行设置。
20、优选的,安装板设有第二螺纹孔和第三螺纹孔,第二螺纹孔通过紧固件与主体框架连接,第三螺纹孔用于固定开关电源。
21、优选的,主体框架包括:
22、架体,架体设有通孔,通孔通过紧固件将架体固定于安装板,架体设有固定板,架体设有第四螺纹孔,第四螺纹孔通过螺栓与直线滑轨连接,架体设有元件板;
23、第二外罩固定方钢,设有多个,多个第二外罩固定方钢设于架体的一侧,第二外罩固定方钢用于固定外罩。
24、优选的,直线滑轨包括:
25、导轨,固定于架体;
26、导轨滑块,与导轨配合设置,导轨滑块沿导轨移动,导轨滑块与升降机构连接。
27、优选的,升降机构包括:
28、壳体,壳体内设有螺杆,螺杆带动滑块移动;
29、电机,设于壳体的端部,电机与控制装置连接,电机的输出端与螺杆连接;
30、限位开关,设于壳体的两端,限位开关与控制装置连接。
31、优选的,摄像装置包括:
32、摄像头安装板,通过肘节连接板与角度调节组件连接,摄像头安装板包括直线轴承和四个板体,四个板体通过直线轴承与轴转动连接,四个板体沿直线轴承的高度方向设置;
33、补光灯,设有四根,四根补光灯呈口字型固定于板体的四周,以使补光灯围设于摄像头的周向,摄像头固定于板体。
34、优选的,角度调节组件包括:
35、调节件,设有多个,多个调节件与对应的肘节连接板转动连接,调节件与肘节连接板件有空隙;
36、调节杆,与调节件连接,调节件沿调节杆的高度方向设置,调节杆与电缸连接。
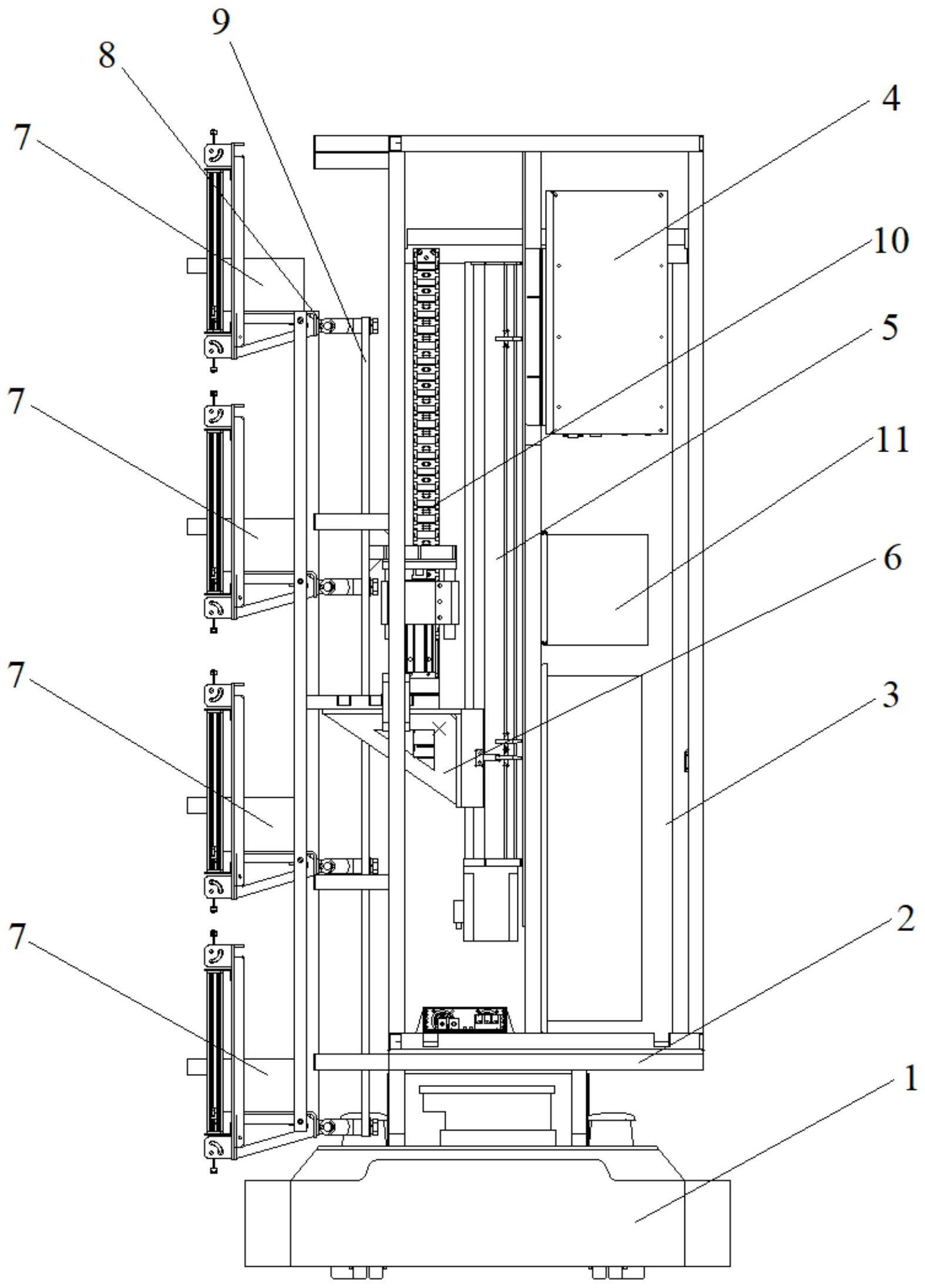
37、本发明提供的具有自动巡检功能的机器人,包括可移动底盘、二次开发平台、主体框架、升降机构和摄像装置;具体来说,可移动底盘的顶部设有支座,二次开发平台通过紧固件固定在支座上,可移动底盘设有控制自身移动的控制器和驱动器,以实现机器人的移动,主体框架通过紧固件与二次开发平台连接,主体框架设有固定升降机构的固定板和固定工控机的固定角铁,固定角铁固定在固定板上,升降机构设有用于固定摄像头安装组焊的滑块,摄像头安装组焊上固定有电缸,电缸与角度调节组件连接,角度调节组件通过肘节连接板与摄像装置连接,通过升降机构实现摄像头安装组焊的移动,从而带动角度调节组件的移动,以实现摄像装置的升降和俯仰角度的变换,通过摄像装置采集图像,通过工控机识别和处理图像并自动生成巡检报告;采用上述方式设置的具有自动巡检功能的机器人,可以替饲养员进行巡检工作,以节约劳动力,从而提高工作效率。
技术特征:
1.一种具有自动巡检功能的机器人,其特征在于,包括:
2.根据权利要求1所述的具有自动巡检功能的机器人,其特征在于,所述可移动底盘(1)包括:
3.根据权利要求2所述的具有自动巡检功能的机器人,其特征在于,所述支座(101)设有四个,四个所述支座(101)设于所述底板(102)的四个拐角,四个所述支座(101)均设有第一螺纹孔,所述第一螺纹孔通过所述紧固件固定所述二次开发平台(2)。
4.根据权利要求3所述的具有自动巡检功能的机器人,其特征在于,所述二次开发平台(2)包括:
5.根据权利要求4所述的具有自动巡检功能的机器人,其特征在于,所述安装板(203)设有第二螺纹孔和第三螺纹孔,所述第二螺纹孔通过所述紧固件与所述主体框架(3)连接,所述第三螺纹孔用于固定开关电源。
6.根据权利要求5所述的具有自动巡检功能的机器人,其特征在于,所述主体框架(3)包括:
7.根据权利要求6所述的具有自动巡检功能的机器人,其特征在于,所述直线滑轨(10)包括:
8.根据权利要求7所述的具有自动巡检功能的机器人,其特征在于,所述升降机构(5)包括:
9.根据权利要求1-8任意一项所述的具有自动巡检功能的机器人,其特征在于,所述摄像装置(7)包括:
10.根据权利要求9所述的具有自动巡检功能的机器人,其特征在于,所述角度调节组件(9)包括:
技术总结
本发明公开一种具有自动巡检功能的机器人,涉及机器人技术领域,以解决人工巡检笼盒效率低的问题,可移动底盘的顶部设有固定二次开发平台的支座,还设有控制自身移动的控制器和驱动器,以实现机器人的移动,主体框架通过紧固件与二次开发平台连接,主体框架设有固定升降机构的固定板和固定工控机的固定角铁,升降机构设有用于固定摄像头安装组焊的滑块,摄像头安装组焊上固定有电缸,电缸与角度调节组件连接,角度调节组件通过肘节连接板与摄像装置连接,通过升降机构实现摄像头安装组焊的移动,以带动角度调节组件的移动,实现摄像装置的升降和俯仰角度的变换,通过摄像装置采集图像,通过工控机识别和处理图像并自动生成巡检报告。
技术研发人员:郑亚鹏,赵国强,赵强,龙国辉,孙传虎,刘扬
受保护的技术使用者:山东新华医疗器械股份有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!