一种多节嵌套式软体机械臂及使用方法
本发明涉及机械臂,具体涉及一种多节嵌套式软体机械及使用方法。
背景技术:
1、传统的刚性机械臂占据着机器人市场的主流,这些刚性机械臂存在着结构密度大,与工作环境交互的安全性等问题;随着机器人的应用逐渐增多,其面临的操作环境也越来越复杂。
2、相较于传统的刚性机械臂,软体机械臂具有较轻的重量、更好的抗冲击能力、更强的环境适应性以及更安全的人机交互环境。软体机械臂主要使用具有大变形特性的柔性材料加工而成,用这类材料制成的机械臂,具有较大的可变形性和弹性,可以在复杂的环境中实现变形,更加灵活,即使和外界物体发生碰撞,自身的柔顺性也会起到一定的缓冲作用,从而能够在有限的环境中进行安全地交互和平稳地运动。
3、目前,软体机械臂主要采用的驱动方式包括流体驱动、绳系驱动、磁场驱动、智能材料电驱等。流体驱动是利用气压或液压变化驱动囊体变形运动,绳系驱动是通过电机带动绳索提供驱动力,两种驱动方式均具有响应快、作用力矩大等优点,但现有的气压/液压及绳索控制等配套系统复杂,结构较大,无法在狭窄环境中进行操作。磁场驱动一般需要提供外部可控磁场,同样需要复杂的外部设备支持。智能材料电驱是指通过电压或电流变化带动智能材料或结构自身变形,实现运动驱动,具有结构简单、可小型化等诸多优点,其虽然能够在狭窄的环境中进行操作,但同时面临着作用力矩小、控制精度不高等缺点。
技术实现思路
1、本发明的目的在于提供一种多节嵌套式软体机械臂及使用方法,以解决现有软体机械臂结构复杂、体积较大无法在狭窄环境中工作的问题。
2、本发明解决上述技术问题的技术方案如下:
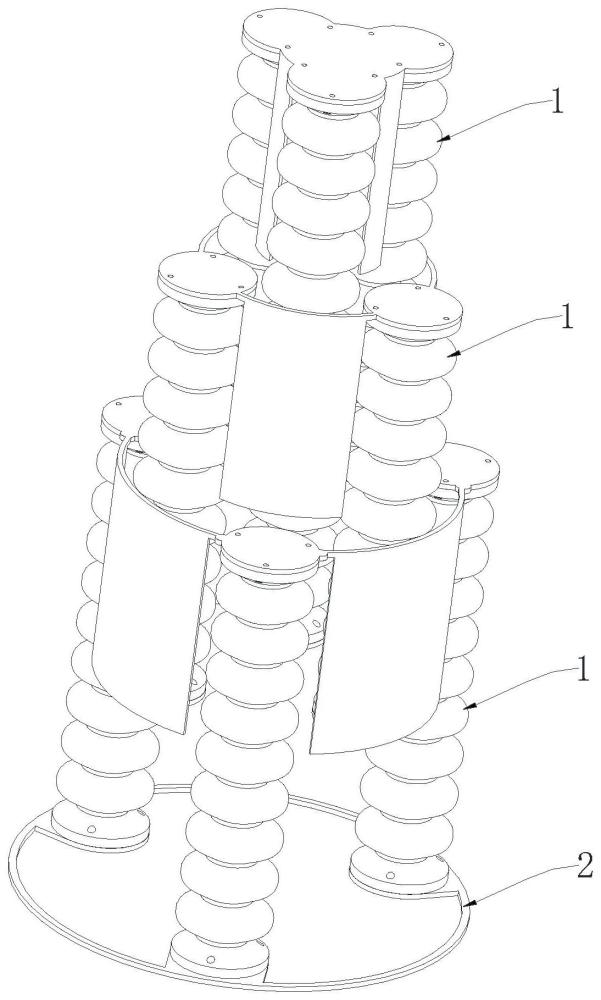
3、一种多节嵌套式软体机械臂,包括:至少两组由外至内依次套设的机械臂单元;
4、机械臂单元包括多个周向均匀间隔分布的波纹管、位于相邻波纹管之间的弧形限位板、以及与波纹管的顶部连接的连接板,弧形限位板的顶端侧壁与相邻连接板的边缘连接;
5、相邻机械臂单元之间,位置在内的机械臂单元的波纹管与位置在外的机械臂单元的弧形限位板一一对应连接;通过调节波纹管内的气压,使机械臂伸缩和弯曲。
6、本发明通过机械臂单元,且每个机械臂单元的波纹管分别外接气源和气压传感器,从而能进行独立气动控制;通过调节波纹管内的气压,实现机械臂的伸缩和弯曲;波纹管伸长时,会使得软体机械臂完全伸展后的长度增加,内外套设的方式使得收缩时不会增加软体机械臂的整体长度,只会增加软体机械臂的半径,故而结构更简单,且达到小型化设计的目的,进而能够在狭窄的环境中进行操作,且能承受一定负载,可精准控制不同的气动模块进行伸缩和弯曲,控制精度高,操作便捷。
7、进一步地,相邻机械臂单元之间,位置在内的机械臂单元的波纹管收缩时,位置在内的机械臂单元的连接板的顶部不高于位置在外的机械臂单元的连接板的顶部。
8、本发明的设置方式,使得相邻机械臂单元在收缩时,位置在内的机械臂单元可以收缩至位置在外的机械臂单元中,从而不会增加机械臂的整体长度,使用更方便。
9、进一步地,相邻机械臂单元之间,位置在外的机械臂单元的弧形限位板的底端内壁设置有与位置在内的机械臂单元的波纹管的底部连接的第一固定板。
10、通过设置第一固定板,可限制波纹管向下的移动位置,从而使得不同的机械臂单元实现阶梯式伸缩,能控制机械臂处于不同的姿态。
11、进一步地,在同一机械臂单元内,弧形限位板与波纹管之间具有间隙。
12、进一步地,位于最内侧的机械臂单元的所有连接板一体成型。
13、进一步地,位于最外侧的机械臂单元的波纹管的底部设有基板。
14、进一步地,基板包括连接环、以及周向设置在连接环的内侧且分别与最外侧的机械臂单元的波纹管的底部一一对应连接的多个第二固定板。
15、进一步地,所有第二固定板沿连接环均匀分布。
16、进一步地,相邻机械臂单元的波纹管呈交错分布。
17、相邻的机械臂单元上的波纹管交错分布,故而可以最大化利用机械臂单元内的空间,使得相同体积下能够设置更多的机械臂单元。
18、本发明还提供一种多节嵌套式软体机械臂的使用方法,包括以下调节方式:
19、伸缩调节:同一机械臂单元的波纹管同步伸长或缩短,实现机械臂的整体伸长或缩短;
20、弯曲调节:同一机械臂单元的波纹管非同步伸长或缩短,实现机械臂的弯曲。
21、本发明具有以下有益效果:
22、1、本发明通过机械臂单元,且机械臂单元的波纹管分别外接气源和气压传感器,从而能进行独立气动控制;通过调节波纹管内的气压,实现机械臂的伸缩和弯曲;波纹管伸长时,会使得软体机械臂完全伸展后的长度增加,实现机械臂呈现出不同的姿态。
23、2、本发明的波纹管采用弹性材料制成,通过外接气源充气,能使波纹管膨胀伸长;当波纹管内部施加的气压不同时,会使机械臂呈现出不同的姿态,通过主动调控波纹管内的气压,就能实现控制机械臂的伸缩和弯曲,进而能够在狭窄的环境中进行操作,且能承受一定负载,可精准控制不同的气动模块进行伸缩和弯曲,控制精度高。
24、3、本发明设置至少两组机械臂单元,且相邻机械臂单元以内外套设的布设方式,使得相邻的机械臂单元在收缩时不会增加机械臂的整体长度,只会增加机械臂的半径,故而结构更简单,且达到小型化设计的目的。
25、4、本发明通过设置至少两组机械臂单元,可以根据使用需要控制不同的机械臂单元伸长,进而可使机械臂伸展不同的长度,从而能根据实际使用需求控制不同的机械臂单元伸长和弯曲;因此本发明的机械臂可以进入传统机械臂不能进入的场景,适应范围广。
技术特征:
1.一种多节嵌套式软体机械臂,其特征在于,包括:至少两组由外至内依次套设的机械臂单元(1);
2.根据权利要求1所述的多节嵌套式软体机械臂,其特征在于,相邻所述机械臂单元(1)之间,位置在内的所述机械臂单元(1)的波纹管(11)收缩时,位置在内的所述机械臂单元(1)的连接板(13)的顶部不高于位置在外的所述机械臂单元(1)的连接板(13)的顶部。
3.根据权利要求2所述的多节嵌套式软体机械臂,其特征在于,相邻所述机械臂单元(1)之间,位置在外的所述机械臂单元(1)的弧形限位板(12)的底端内壁设置有与位置在内的所述机械臂单元(1)的波纹管(11)的底部连接的第一固定板(14)。
4.根据权利要求1所述的多节嵌套式软体机械臂,其特征在于,在同一所述机械臂单元(1)内,所述弧形限位板(12)与所述波纹管(11)之间具有间隙。
5.根据权利要求1所述的多节嵌套式软体机械臂,其特征在于,位于最内侧的所述机械臂单元(1)的所有连接板(13)一体成型。
6.根据权利要求1至5任一项所述的多节嵌套式软体机械臂,其特征在于,位于最外侧的所述机械臂单元(1)的波纹管(11)的底部设有基板(2)。
7.根据权利要求6所述的多节嵌套式软体机械臂,其特征在于,所述基板(2)包括连接环(21)、以及周向设置在所述连接环(21)的内侧且分别与最外侧的所述机械臂单元(1)的波纹管(11)的底部一一对应连接的多个第二固定板(22)。
8.根据权利要求7所述的多节嵌套式软体机械臂,其特征在于,所有所述第二固定板(22)沿所述连接环(21)均匀分布。
9.根据权利要求6所述的多节嵌套式软体机械臂,其特征在于,相邻所述机械臂单元(1)的波纹管(11)呈交错分布。
10.一种多节嵌套式软体机械臂的使用方法,其特征在于,使用权利要求1至9任一项所述的多节嵌套式软体机械臂,包括以下调节方式:
技术总结
本发明公开了一种多节嵌套式软体机械臂及使用方法,包括:至少两组由外至内依次套设的机械臂单元;机械臂单元包括多个周向均匀间隔分布的波纹管、位于相邻波纹管之间的弧形限位板、以及与波纹管的顶部连接的连接板;相邻机械臂单元之间,位置在内的机械臂单元的波纹管与位置在外的机械臂单元的弧形限位板一一对应连接。本发明通过调节波纹管内的气压,实现机械臂的伸缩和弯曲;内外套设的方式使得机械臂单元收缩时不会增加机械臂的整体长度,故而结构更简单,达到小型化设计目的;伸长后的机械臂能在狭窄的环境中进行操作,且能承受一定负载,可精准控制不同的机械臂单元进行伸缩和弯曲,控制精度高。
技术研发人员:蒲伟,谢雨鑫,张印,白佳骆
受保护的技术使用者:四川大学
技术研发日:
技术公布日:2024/2/6
- 还没有人留言评论。精彩留言会获得点赞!