一种机器人关节密封方法与流程
本发明属于机器人关节密封,具体涉及一种机器人关节密封方法。
背景技术:
1、随着机器人广泛应用于各行各业中,在打磨、喷漆、清洗、焊接等工作环境恶劣的应用场景中,机器人均可以代替人工,从而有效节约人工成本,但这对于机器人的防护性和密封性提出了很高的要求,若密封性或防护性不达标,喷涂的粉尘、打磨的金属屑等杂质有可能会进入到机器人内部,进而损坏机器人关节的运动功能,同时由于rv减速机部分结构与外界环境接触,也会生锈被腐蚀,而且由于rv减速机自身密封性能并不能完全保证内部润滑脂不泄露,漏油现象时有发生,为了提高机器人关节的防护性和密封性,目前采用的方法通常是涂胶密封,但涂胶密封只能保证外界不污染机器人关节内部且只适用于静态密封,对于减速机的漏油并没有对应的方案,因此亟需一种机器人关节密封方法用于解决上述问题。
技术实现思路
1、针对上述背景技术所提出的问题,本发明的目的是:旨在提供一种机器人关节密封方法。
2、为实现上述技术目的,本发明采用的技术方案如下:
3、一种机器人关节密封方法,其特征在于:包括以下步骤:
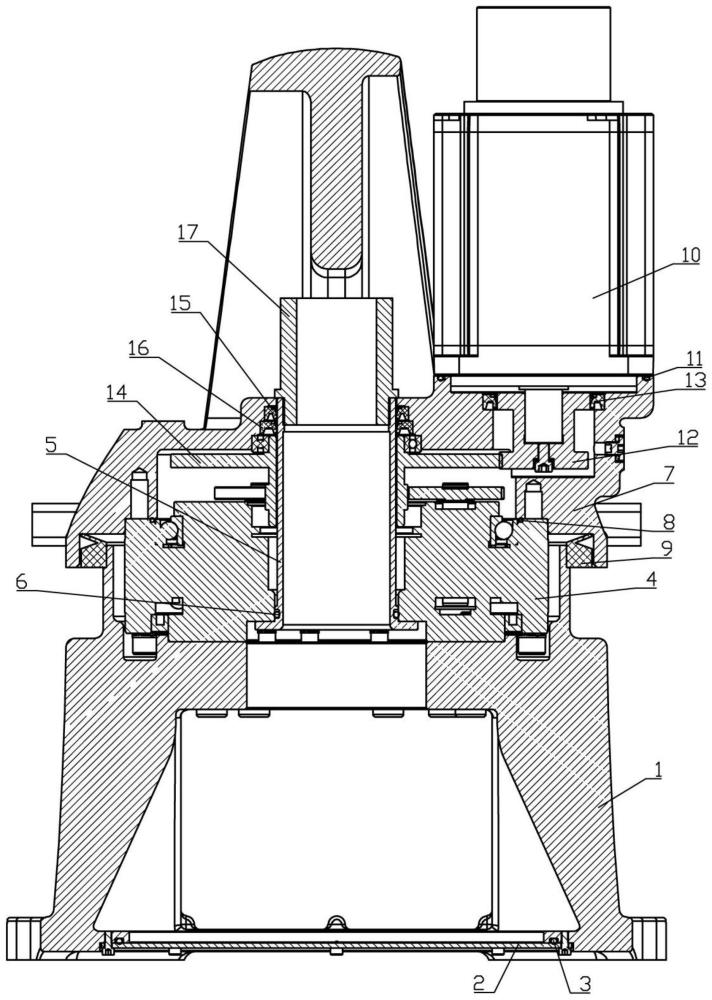
4、s1:准备第一关节件,第一关节件的底部设有保护腔,并在第一关节件的底部安装底板,并在底板和第一关节件之间设置第一o型圈,从而使底板上部腔体的底面形成密封;
5、s2:在第一关节件的顶部内侧安装减速机,减速机内安装中心管,中心管与减速机之间设置第二o型圈;
6、s3:在减速机的顶部安装第二关节件,减速机与第二关节件的安装面设置有第三o型圈;
7、s4:在第一关节件与第二关节件之间设置第一油封,通过第一关节件和第二关节件搭配第一油封,能够将减速机保护在内部;
8、s5:在第二关节件的顶部一侧安装电机,第二关节件与电机之间设置第四o型圈,电机的动力输出端连接有主动齿轮,第二关节件在对应主动齿轮处安装有第二油封,主动齿轮啮合连接有被动齿轮,被动齿轮安装在中心管上;
9、s6:在中心管与第二关节件之间设置了第三油封和第四油封;
10、s7:中心管的顶部设有螺纹连接,与波纹管接头之间通过螺纹紧固。
11、进一步限定,在s2和s3中,减速机的输出轴与第一关节件通过螺栓锁紧固定,减速机的壳体通过螺栓锁紧固定在第二关节件内。
12、进一步限定,在s2中,中心管与减速机输出轴通过螺栓锁紧固定。
13、进一步限定,在s5中,电机与第二关节件通过螺栓锁紧固定。
14、进一步限定,第一油封与第一关节件之间为过盈配合,其唇口与第二关节件之间滑动形成动密封,第二油封、第三油封和第四油封的安装均如上述所示。
15、进一步限定,在s5中,主动齿轮设有特殊结构型式,其第二油封的油封唇口位尺寸大于齿顶圆直径。
16、本发明的有益效果为:本发明解决了以下技术问题:
17、1、提高机器人关节防护等级;
18、2、提高对机器人关节处所用零部件的保护,譬如减速机、轴承、螺钉、电缆及接头等;
19、3、使机器人适用更加恶劣的工作环境;
20、4、解决了机器人润滑油泄漏问题;
21、5、主动齿轮的设计,既满足密封需求,又满足传动需求;
22、6、中心管的设计,解决了传统的本体线与中心孔之间间隙,漏水、漏尘的问题。
技术特征:
1.一种机器人关节密封方法,其特征在于:包括以下步骤:
2.根据权利要求1所述的一种机器人关节密封方法,其特征在于:在s2和s3中,减速机(4)的输出轴与第一关节件(1)通过螺栓锁紧固定,减速机(4)的壳体通过螺栓锁紧固定在第二关节件(7)内。
3.根据权利要求2所述的一种机器人关节密封方法,其特征在于:在s2中,中心管(5)与减速机(4)输出轴通过螺栓锁紧固定。
4.根据权利要求3所述的一种机器人关节密封方法,其特征在于:在s5中,电机(10)与第二关节件(7)通过螺栓锁紧固定。
5.根据权利要求4所述的一种机器人关节密封方法,其特征在于:第一油封(9)与第一关节件(1)之间为过盈配合,其唇口与第二关节件(7)之间滑动形成动密封,第二油封(13)、第三油封(15)和第四油封(16)的安装均如上述所示。
6.根据权利要求5所述的一种机器人关节密封方法,其特征在于:在s5中,主动齿轮(12)设有特殊结构型式,其第二油封(13)的油封唇口位尺寸大于齿顶圆直径。
技术总结
本发明公开了一种机器人关节密封方法,其特征在于:包括以下步骤:S1:准备第一关节件,在第一关节件底部安装底板,在底板和第一关节件之间设置第一O型圈;S2:第一关节件安装减速机,减速机内安装中心管,中心管与减速机之间设置第二O型圈;S3:减速机的顶部安装第二关节件,减速机与第二关节件之间设置有第三O型圈;S4:第一关节件与第二关节件之间设置第一油封;S5:第二关节件安装电机,第二关节件与电机之间设置第四O型圈,电机的连接有主动齿轮,第二关节件在主动齿轮处安装有第二油封,主动齿轮连接有被动齿轮,被动齿轮安装在中心管上;S6:在中心管与第二关节件之间设置了第三油封和第四油封;S7:中心管与波纹管接头通过螺纹紧固。
技术研发人员:董泽锋,罗涛,杨裕才,夏荣康,伍英泉,黄争生,黄明玉,廖世亮
受保护的技术使用者:芜湖藦卡机器人科技有限公司
技术研发日:
技术公布日:2024/1/25
- 还没有人留言评论。精彩留言会获得点赞!