一种输电铁塔塔脚机器人焊接轨迹规划装置及方法与流程
本发明涉及工业焊接设备,具体地说,涉及一种输电铁塔塔脚机器人焊接轨迹规划装置及方法。
背景技术:
1、输电铁塔的塔脚为整个输导线路铁塔结构的支撑部件,其结构的稳定性直接决定了输导线路铁塔的结构稳定性和使用寿命,输导线路铁塔塔脚为焊接组合件,由于焊接人员的焊接水平、焊接经验的不同,会导致塔脚的产量与质量无法保证,不同规格的塔脚在焊接时路径的选择也不同,因此需要一种输电铁塔塔脚机器人焊接轨迹规划装置。
2、授权公告号为cn114515924b的实用新型专利公开一种基于焊缝识别的塔脚工件自动焊接系统及方法,包括相互配合的上位机、机器人控制柜、焊接机器人、二轴变位机和三维结构光相机;上位机用于接收三维结构光相机拍摄的工件表面点云信息,进行点云拼接和工件表面重建,完成焊缝提取和焊接机器人的焊接路径规划;机器人控制柜用于控制焊接机器人的焊接和二轴变位机的运动;所述的二轴变位机用于固定焊接工件,并调整焊接工件的角度;三维结构光相机用于拍摄焊接工件的表面点云信息。通过提取焊接工件焊接部位的所有焊缝三维坐标信息,可直接指导焊接机器人的焊接路径规划,能提高塔脚工件的焊接效率和焊接精度,对不同规格的塔脚工件具有通用性。
3、虽然上述发明专利具有焊接和焊接轨迹规划的功能,但是装置需要完成焊接与轨迹规划这一动作所需的装置太多,扫描架结构庞大,经济性差,难以保证对塔脚露出表面的扫描,鉴于此,我们提出一种输电铁塔塔脚机器人焊接轨迹规划装置及方法。
技术实现思路
1、鉴于现有技术中的上述缺陷或不足,期望提供一种输电铁塔塔脚机器人焊接轨迹规划装置及方法。
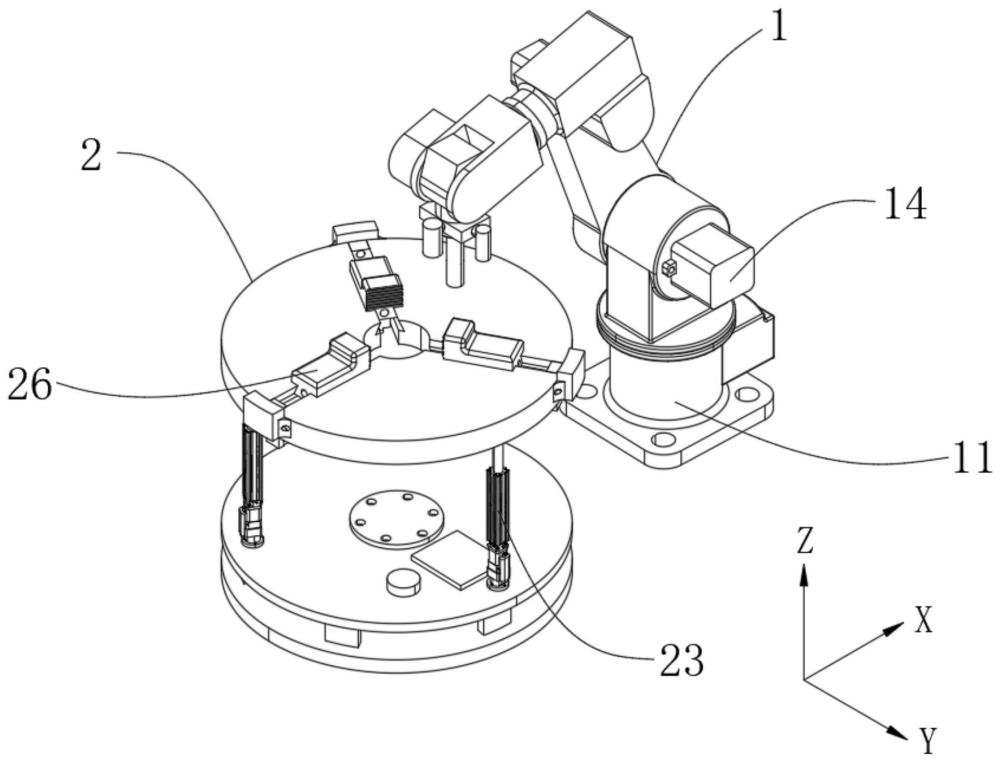
2、一方面,本申请提供了一种输电铁塔塔脚机器人焊接轨迹规划装置,包括包括机械臂,所述机械臂包括用于识别塔脚外观的感应焊接工作装置,所述机械臂旁设有安装定位装置,所述安装定位装置包括传动板,所述传动板正上方转动连接有等大的安装转动板,所述安装转动板顶端通过螺栓连接有若干个圆周分布的伸缩电机,所述伸缩电机顶端铰接有限位块,若干个所述限位块顶端铰接在同一个顶板上,所述顶板上呈辐射状滑动插接有若干个用于与塔脚接触的滑块,所述顶板外圆侧壁上通过螺栓连接有与所述滑块数量相同且位置一一对应的抵块,所述顶板底端设有若干个分别与所述滑块一一对应铰接并且用于驱动对应所述滑块滑动的电动伸缩杆。
3、根据本申请实施例提供的技术方案,所述机械臂包括支撑座,所述支撑座顶端转动连接有安装座,所述安装座沿y轴反向的一端转动连接有衔接柱,所述安装座沿y轴正向的一端通过螺栓连接有输出轴穿过所述安装座并且用于所述衔接柱动作的电机一,所述衔接柱靠近所述安装座的一端面上侧转动连接有限位座,所述衔接柱沿y轴反向的一端通过螺栓连接有输出轴穿过所述衔接柱并且用于所述限位座动作的电机二,所述限位座顶端与所述感应焊接工作装置焊接固定。
4、根据本申请实施例提供的技术方案,所述支撑座顶端设有矩阵分布的若干个用于与地面铆接固定的通孔,所述电机一、所述电机二规格尺寸不同且动作时互不干涉。
5、根据本申请实施例提供的技术方案,所述感应焊接工作装置包括连接杆,所述连接杆沿x轴反向的一端转动连接有安装块,所述连接杆沿y轴反向的一端通过螺栓连接有用于驱动所述安装块动作的步进电机,所述安装块底端设有焊枪,所述安装块底端于所述焊枪旁的两侧端面处分别设有信号传输处理器、视觉传感器,所述信号传输处理器与所述视觉传感器通过导线电性连接。
6、根据本申请实施例提供的技术方案,所述传动板顶端几何中心处通过螺栓连接有用于驱动所述安装转动板动作的电机三,所述传动板顶端靠近外圆轮廓线处焊接有若干个圆周分布的传动支撑块,所述传动支撑块顶端转动连接有若干个用于与所述安装转动板滚动连接的滚轮。
7、根据本申请实施例提供的技术方案,所述安装转动板顶面一侧设有显示处理器,所述安装转动板顶面于所述显示处理器旁设有与信号传输处理器配套的信号传输装置,所述安装转动板底端开设有用于容纳若干所述滚轮滚动连接的滑槽,所述安装转动板顶面几何中心处通过螺栓连接有盖板。
8、根据本申请实施例提供的技术方案,所述显示处理器分别与所述电机三、所述信号传输装置、所述伸缩电机通过导线电性连接,所述盖板底端与所述电机三的输出轴键连接。
9、根据本申请实施例提供的技术方案,所述伸缩电机与所述电动伸缩杆不接触,所述伸缩电机与所述顶板底面相平行。
10、根据本申请实施例提供的技术方案,所述滑块靠近所述顶板圆心的一端设有若干个线性分布且用于与塔脚接触的摩擦块,所述滑块底端设有竖直向下且用于与所述电动伸缩杆铰接的传动连接块。
11、另一方面,本申请提供了一种输电铁塔塔脚机器人焊接轨迹规划方法,包括上述的输电铁塔塔脚机器人焊接轨迹规划装置,具体包括如下步骤:
12、s1、使用人员先通过电动伸缩杆将塔脚夹持固定,视觉传感器会识别塔脚外观,并通过信号传输处理器将数据传递给显示处理器;
13、s2、显示处理器控制电机三、伸缩电机实现塔脚与机械臂相对位置的改变,从而完成塔脚所有露出表面的结构的识别;
14、s3、通过视觉传感器识别出所有需要焊接的位置,并通过信号传输处理器传递给信号传输装置,信号传输装置会接受信号并传输给显示处理器;
15、s4、显示处理器完成规划后再通过信号传输装置返回给信号传输处理器,信号传输处理器会将数据传输给电机一、电机二、步进电机从而完成塔脚的焊接。
16、综上所述,本技术方案具体公开了一种输电铁塔塔脚机器人焊接轨迹规划装置及方法,其包括机械臂,机械臂包括用于识别塔脚外观的感应焊接工作装置,机械臂旁设有安装定位装置。通过设有信号传输处理器、视觉传感器等,即视觉传感器将识别塔脚的外观,通过设有信号传输处理器、视觉传感器等,即视觉传感器将识别塔脚的外观,通过信号传输处理器将数据传递给显示处理器,显示处理器控制电机三、伸缩电机实现塔脚与机械臂相对位置的改变,从而完成塔脚所有露出表面的识别,视觉传感器会自动识别需要焊接的位置,通过信号传输处理器传递给显示处理器,显示处理器会完成规划,并返回给信号传输处理器,信号传输处理器会将数据传输给电机一、电机二、步进电机从而完成塔脚的焊接,该设计结构简单、经济性好。
技术特征:
1.一种输电铁塔塔脚机器人焊接轨迹规划装置,其特征在于:包括机械臂(1),所述机械臂(1)包括用于识别塔脚外观的感应焊接工作装置(17),所述机械臂(1)旁设有安装定位装置(2),所述安装定位装置(2)包括传动板(21),所述传动板(21)正上方转动连接有等大的安装转动板(22),所述安装转动板(22)顶端通过螺栓连接有若干个圆周分布的伸缩电机(23),所述伸缩电机(23)顶端铰接有限位块(24),若干个所述限位块(24)顶端铰接在同一个顶板(25)上,所述顶板(25)上呈辐射状滑动插接有若干个用于与塔脚接触的滑块(26),所述顶板(25)外圆侧壁上通过螺栓连接有与所述滑块(26)数量相同且位置一一对应的抵块(27),所述顶板(25)底端设有若干个分别与所述滑块(26)一一对应铰接并且用于驱动对应所述滑块(26)滑动的电动伸缩杆(28)。
2.根据权利要求1所述的输电铁塔塔脚机器人焊接轨迹规划装置,其特征在于:所述机械臂(1)包括支撑座(11),所述支撑座(11)顶端转动连接有安装座(12),所述安装座(12)沿y轴反向的一端转动连接有衔接柱(13),所述安装座(12)沿y轴正向的一端通过螺栓连接有输出轴穿过所述安装座(12)并且用于所述衔接柱(13)动作的电机一(14),所述衔接柱(13)靠近所述安装座(12)的一端面上侧转动连接有限位座(15),所述衔接柱(13)沿y轴反向的一端通过螺栓连接有输出轴穿过所述衔接柱(13)并且用于所述限位座(15)动作的电机二(16),所述限位座(15)顶端与所述感应焊接工作装置(17)焊接固定。
3.根据权利要求2所述的输电铁塔塔脚机器人焊接轨迹规划装置,其特征在于:所述支撑座(11)顶端设有矩阵分布的若干个用于与地面铆接固定的通孔(111),所述电机一(14)、所述电机二(16)规格尺寸不同且动作时互不干涉。
4.根据权利要求1所述的输电铁塔塔脚机器人焊接轨迹规划装置,其特征在于:所述感应焊接工作装置(17)包括连接杆(171),所述连接杆(171)沿x轴反向的一端转动连接有安装块(172),所述连接杆(171)沿y轴反向的一端通过螺栓连接有用于驱动所述安装块(172)动作的步进电机(173),所述安装块(172)底端设有焊枪(174),所述安装块(172)底端于所述焊枪(174)旁的两侧端面处分别设有信号传输处理器(175)、视觉传感器(176),所述信号传输处理器(175)与所述视觉传感器(176)通过导线电性连接。
5.根据权利要求1所述的输电铁塔塔脚机器人焊接轨迹规划装置,其特征在于:所述传动板(21)顶端几何中心处通过螺栓连接有用于驱动所述安装转动板(22)动作的电机三(210),所述传动板(21)顶端靠近外圆轮廓线处焊接有若干个圆周分布的传动支撑块(211),所述传动支撑块(211)顶端转动连接有若干个用于与所述安装转动板(22)滚动连接的滚轮(212)。
6.根据权利要求5所述的输电铁塔塔脚机器人焊接轨迹规划装置,其特征在于:所述安装转动板(22)顶面一侧设有显示处理器(221),所述安装转动板(22)顶面于所述显示处理器(221)旁设有与信号传输处理器(175)配套的信号传输装置(222),所述安装转动板(22)底端开设有用于容纳若干所述滚轮(212)滚动连接的滑槽(223),所述安装转动板(22)顶面几何中心处通过螺栓连接有盖板(224)。
7.根据权利要求6所述的输电铁塔塔脚机器人焊接轨迹规划装置,其特征在于:所述显示处理器(221)分别与所述电机三(210)、所述信号传输装置(222)、所述伸缩电机(23)通过导线电性连接,所述盖板(224)底端与所述电机三(210)的输出轴键连接。
8.根据权利要求1所述的输电铁塔塔脚机器人焊接轨迹规划装置,其特征在于:所述伸缩电机(23)与所述电动伸缩杆(28)不接触,所述伸缩电机(23)与所述顶板(25)底面相平行。
9.根据权利要求1所述的输电铁塔塔脚机器人焊接轨迹规划装置,其特征在于:所述滑块(26)靠近所述顶板(25)圆心的一端设有若干个线性分布且用于与塔脚接触的摩擦块(261),所述滑块(26)底端设有竖直向下且用于与所述电动伸缩杆(28)铰接的传动连接块(262)。
10.一种输电铁塔塔脚机器人焊接轨迹规划方法,包括权利要求1-9任一所述的输电铁塔塔脚机器人焊接轨迹规划装置,其特征在于,具体包括如下步骤:
技术总结
本发明公开了一种输电铁塔塔脚机器人焊接轨迹规划装置及方法,属于工业焊接设备技术领域,包括机械臂,机械臂包括用于识别塔脚外观的感应焊接工作装置,机械臂旁设有安装定位装置。该设计通过设有信号传输处理器、视觉传感器等,即视觉传感器将识别塔脚的外观,通过信号传输处理器将数据传递给显示处理器,显示处理器控制电机三、伸缩电机实现塔脚与机械臂相对位置的改变,从而完成塔脚所有露出表面的识别,视觉传感器会自动识别需要焊接的位置,通过信号传输处理器传递给显示处理器,显示处理器会完成规划,并返回给信号传输处理器,信号传输处理器会将数据传输给电机一、电机二、步进电机从而完成塔脚的焊接,该设计结构简单、经济性好。
技术研发人员:洪敏,叶秋鹏,陈威,巴军,郭琪
受保护的技术使用者:重庆广仁能源装备股份有限公司
技术研发日:
技术公布日:2024/3/21
- 还没有人留言评论。精彩留言会获得点赞!