一种机器人关节摩擦辨识方法、机器人系统及操作方法与流程
本发明涉及工业机器人,尤其涉及一种机器人关节摩擦辨识方法、机器人系统及操作方法。
背景技术:
1、在机器人应用广泛的工业制造领域,现有的工业机器人的机械臂通常工作在结构化的环境中,重复执行指定的运动任务。为了提高生产任务的效率和质量,工业机械臂具备高精度,高速以及高负载的特性。
2、然而,在机器人的使用过程中,由于工业机器人的机械臂的关节数量很多,在使用过程中,关节存在摩擦阻碍问题,会降低机器人的运行精度,并且随着机器人运行时间的延长,关节的摩擦会更加严重,严重降低了机器人对指令轨迹的跟踪精度。
技术实现思路
1、(一)发明目的
2、本发明的目的是提供一种机器人关节摩擦辨识方法、机器人系统及操作方法,以解决现有的机器人的关节存在摩擦阻碍,严重降低机器人对指令轨迹的跟踪精度的问题。
3、(二)技术方案
4、为解决上述问题,本发明提供了一种机器人关节摩擦辨识方法,包括:
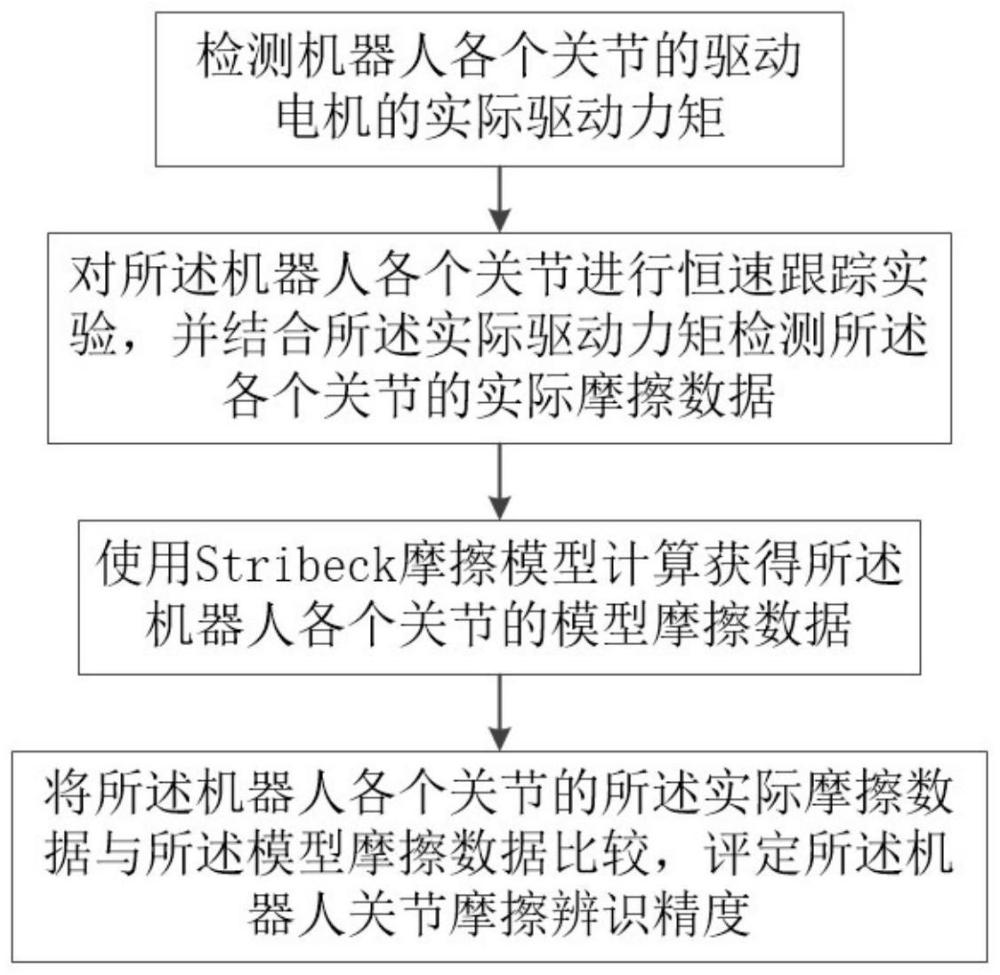
5、检测机器人各个关节的驱动电机的实际驱动力矩;
6、对所述机器人各个关节进行恒速跟踪实验,并结合所述实际驱动力矩检测所述各个关节的实际摩擦数据;
7、使用stribeck摩擦模型计算获得所述机器人各个关节的模型摩擦数据;
8、将所述机器人各个关节的所述实际摩擦数据与所述模型摩擦数据比较,评定所述机器人关节摩擦辨识精度。
9、可选地,检测机器人各个关节的驱动电机的实际驱动力矩包括:
10、采样所述机器人各个关节的驱动电机的伺服驱动器的电流环的电流信号;
11、根据所述驱动电机的伺服驱动器的电流环的电流信号和所述驱动电机的扭矩系数获得所述驱动电机的实际驱动力矩。
12、可选地,对所述机器人各个关节进行恒速跟踪实验,并结合所述实际驱动力矩检测所述各个关节的实际摩擦数据包括:
13、对多个第一类关节逐个进行单向恒速跟踪实验,并根据对应的所述实际驱动力矩获得所述第一类关节的轴线与重力方向平行状态下的实际摩擦数据;
14、对多个第二类关节逐个进行正反向恒速跟踪实验,并根据对应的所述实际驱动力矩获得所述第二类关节的实际摩擦数据;
15、其中,所述第一类关节为其轴线可以转动到与重力方向平行的状态,所述第二类关节为其轴线不能转动到与重力方向平行的状态。
16、可选地,对多个第二类关节逐个进行正反向恒速跟踪实验,并根据对应的所述实际驱动力矩获得所述第二类关节的实际摩擦数据包括:
17、使用第一公式:获得所述第二类关节的实际摩擦数据;
18、其中,为所述第二类关节的摩擦力矩,u1为所述第二类关节正向恒速跟踪实验时的所述实际驱动力矩,u2为所述第二类关节反向恒速跟踪实验时的所述实际驱动力矩,所述第二类关节的实际摩擦数据包括所述第二类关节的摩擦力矩。
19、可选地,使用stribeck摩擦模型计算获得所述机器人各个关节的模型摩擦数据包括:
20、使用最小二乘法将所述各个关节的实际摩擦数据拟合stribeck摩擦模型,所述stribeck摩擦模型公式为:
21、
22、其中,fc为库仑摩擦力,fs为最大静摩擦力,vs为stribeck速度,ξ为经验参数,sgn(·)为符号函数,v为关节的两接触表面的相对运动速度,σ为粘性摩擦系数,fe为外加力,fc,fs,vs和σ为需要辨识的参数。
23、可选地,所述机器人的关节为rv驱动关节,经验参数ξ取值为1;
24、所述机器人的关节为谐波驱动关节,经验参数ξ取值为2。
25、另外,本发明还提供了一种机器人系统,所述系统包括多关节机器人和计算机可读存储介质,所述多关节机器人与所述计算机可读存储介质连接,
26、所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器读取并运行时,实现如所述机器人关节摩擦辨识方法。
27、另外,本发明还提供了一种操作方法,用于操控所述的机器人系统,所述操作方法包括:
28、对机器人的指定关节标定指定的限位点;
29、将机器人运动到所述指定的限位点;
30、使处理器读取并运行计算机程序;
31、在所述计算机程序运行结束后,检测所述计算机程序运行过程中是否有暂停,若有暂停,将所述机器人手动移动到暂停行起始点位,继续运行所述计算机程序。
32、(三)有益效果
33、检测机器人各个关节的驱动电机的实际驱动力矩,并结合所述实际驱动力矩检测所述各个关节的实际摩擦数据,这里充分利用了驱动电机的实际驱动力矩与实际摩擦力紧密关联的特点,从而保证检测到的实际摩擦数据的准确性。而stribeck摩擦模型作为静态摩擦模型的典型代表,能够描述低速时摩擦力的变化趋势,采用stribeck模型进行参数辨识,并依此作为依据来添加补偿项,完全可以满足机器人系统的需要,因此使用stribeck摩擦模型计算获得所述机器人各个关节的模型摩擦数据可以保证模型摩擦数据的准确性和适用性。然后再将所述机器人各个关节的所述实际摩擦数据与所述模型摩擦数据比较,评定所述机器人关节摩擦辨识精度。从而实现对机器人关节摩擦进行前馈补偿,保证机器人关节摩擦辨识的精确性,提高机器人系统对指令轨迹的跟踪精度。
技术特征:
1.一种机器人关节摩擦辨识方法,其特征在于:包括:
2.根据权利要求1所述的机器人关节摩擦辨识方法,其特征在于,
3.根据权利要求1所述的机器人关节摩擦辨识方法,其特征在于,
4.根据权利要求3所述的机器人关节摩擦辨识方法,其特征在于,
5.根据权利要求3所述的机器人关节摩擦辨识方法,其特征在于,
6.根据权利要求5所述的机器人关节摩擦辨识方法,其特征在于,
7.一种机器人系统,其特征在于,所述系统包括多关节机器人和计算机可读存储介质,所述多关节机器人与所述计算机可读存储介质连接,
8.一种操作方法,其特征在于,用于操控权利要求7所述的机器人系统,所述操作方法包括:
技术总结
本发明公开了一种机器人关节摩擦辨识方法、机器人系统及操作方法,涉及工业机器人技术领域。所述摩擦辨识方法,包括:检测机器人各个关节的驱动电机的实际驱动力矩;对所述机器人各个关节进行恒速跟踪实验,并结合所述实际驱动力矩检测所述各个关节的实际摩擦数据;使用Stribeck摩擦模型计算获得所述机器人各个关节的模型摩擦数据;将所述机器人各个关节的所述实际摩擦数据与所述模型摩擦数据比较,评定所述机器人关节摩擦辨识精度。使用Stribeck摩擦模型计算获得所述机器人各个关节的模型摩擦数据可以保证模型摩擦数据的准确性和适用性。然后再将所述机器人各个关节的所述实际摩擦数据与所述模型摩擦数据比较,评定所述机器人关节摩擦辨识精度。
技术研发人员:徐金龙,季晨,罗小群,张福胜
受保护的技术使用者:宣城云万斛科技有限公司
技术研发日:
技术公布日:2024/2/1
- 还没有人留言评论。精彩留言会获得点赞!