数据处理方法、装置、设备及计算机介质与流程
本公开属于智能控制领域,尤其涉及一种数据处理方法、装置、设备及计算机介质。
背景技术:
1、相关技术中,随着智能机器人的相关技术的发展,智能机器人的应用越来越广泛,抓取能力是智能机器人的一项重要能力。相关技术中,智能机器人在实现对物品的抓取时,无法准确根据用户的指令识别相应的目标物品,抓取效率较低。
技术实现思路
1、本公开实施例提供一种与相关技术不同的实现方案,以解决相关技术中的智能机器人无法准确根据用户的指令识别相应的目标物品,抓取效率较低的技术问题。
2、第一方面,本公开提供一种数据处理方法,所述方法包括:
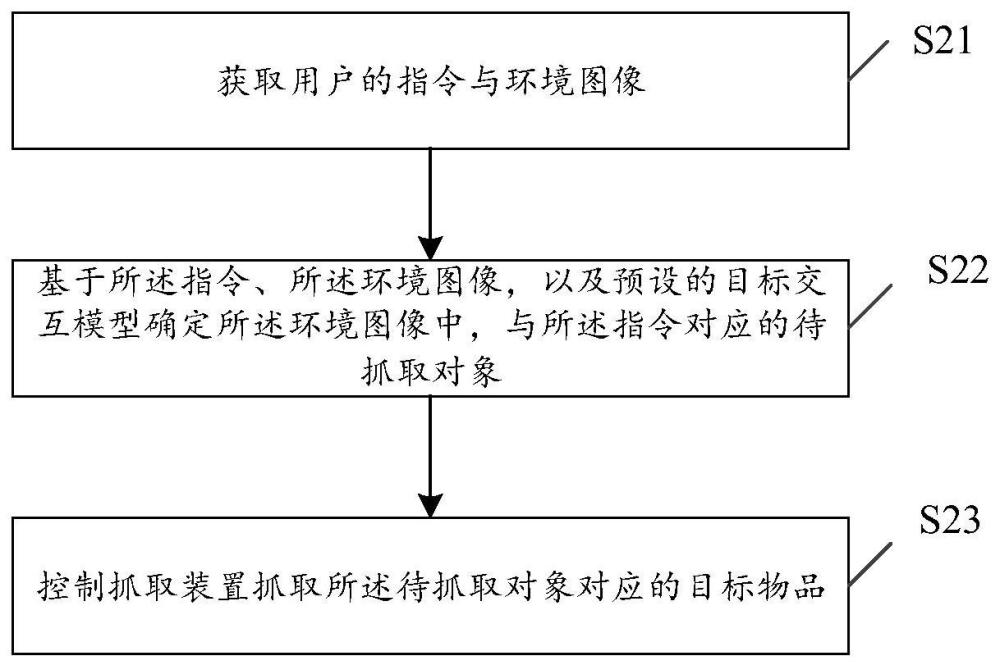
3、获取用户的指令与环境图像;
4、基于所述指令、所述环境图像,以及预设的目标交互模型确定所述环境图像中,与所述指令对应的待抓取对象;
5、控制抓取装置抓取所述待抓取对象对应的目标物品。
6、第二方面,本公开提供一种数据处理装置,包括:
7、获取单元,用于获取用户的指令与环境图像;
8、确定单元,用于基于所述指令、所述环境图像,以及预设的目标交互模型确定所述环境图像中,与所述指令对应的待抓取对象;
9、控制单元,用于控制抓取装置抓取所述待抓取对象对应的目标物品。
10、第三方面,本公开提供一种电子设备,包括:
11、处理器;以及
12、存储器,用于存储所述处理器的可执行指令;
13、其中,所述处理器配置为经由执行所述可执行指令来执行第一方面、或第一方面各可能的实施方式中的任一方法。
14、第四方面,本公开实施例提供一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现第一方面、或第一方面各可能的实施方式中的任一方法。
15、本公开提供的获取用户的指令与环境图像;基于所述指令、所述环境图像,以及预设的目标交互模型确定所述环境图像中,与所述指令对应的待抓取对象;控制抓取装置抓取所述待抓取对象对应的目标物品的方案,可通过预设的目标交互模型实时对环境图像与指令进行分析,引入了新的算法,即目标交互模型,以及对环境图像的分析,可使得智能机器人在实现对物品的抓取时,可准确根据用户的指令识别相应的目标物品,抓取效率较高。
技术特征:
1.一种数据处理方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,控制抓取装置抓取所述待抓取对象对应的目标物品,包括:
3.根据权利要求1所述的方法,其特征在于,所述用户的指令为与所述用户的第一交互内容,基于所述指令、所述环境图像,以及预设的目标交互模型确定所述环境图像中,与所述指令对应的待抓取对象,包括:
4.根据权利要求3所述的方法,其特征在于,根据所述任务执行结果确定所述环境图像中,与所述指令对应的待抓取对象,包括:
5.根据权利要求3所述的方法,其特征在于,所述方法还包括:
6.根据权利要求3所述的方法,其特征在于,所述方法还包括:
7.根据权利要求3所述的方法,其特征在于,所述方法还包括:
8.根据权利要求4所述的方法,其特征在于,所述方法还包括:
9.根据权利要求1所述的方法,所述方法还包括:
10.一种数据处理装置,其特征在于,包括:
11.一种电子设备,其特征在于,包括:
12.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现权利要求1-9任一项所述的方法。
技术总结
本公开公开了一种数据处理方法、装置、设备及计算机介质,方法包括:获取用户的指令与环境图像;基于所述指令、所述环境图像,以及预设的目标交互模型确定所述环境图像中,与所述指令对应的待抓取对象;控制抓取装置抓取所述待抓取对象对应的目标物品,可起到提高智能机器人的抓取效率的作用。
技术研发人员:黎意枫,张翰博,许杰,孔涛
受保护的技术使用者:北京有竹居网络技术有限公司
技术研发日:
技术公布日:2024/2/6
- 还没有人留言评论。精彩留言会获得点赞!