一种机械臂抓取零件方法、装置、设备及存储介质与流程
本发明涉及自动控制,尤其涉及一种机械臂抓取零件方法、装置、设备及存储介质。
背景技术:
1、多轴机械臂机器人的出现,大大提高了生产效率和产品质量,同时也降低了生产成本。由于它们具有很高的自由度,因此可以完成许多复杂的任务。
2、然而,现有多轴机械臂机器人通过视觉图像确定位置,但相机部署位置与多轴机械臂所在位置不同,造成通过视觉图像控制移动多轴机械臂,致使的自动化程度较低,无法根据实际场景进行自动化控制机械臂移动,致使机械臂工作效率降低,移动至目标位置的精确度较差,无法满足实际情况需要。
技术实现思路
1、本发明提供了一种机械臂抓取零件方法、装置、设备及存储介质,以合并机械臂坐标系和相机坐标系,实现通过视觉图像控制多轴机械臂,进而提高多轴机械臂的自动化程度,提升使用体验。
2、根据本发明的一方面,提供了一种机械臂抓取零件方法,该方法包括:
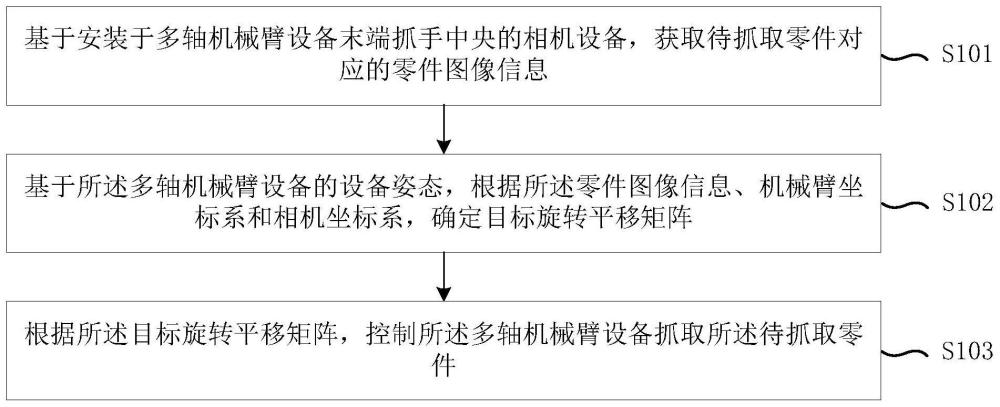
3、基于安装于多轴机械臂设备末端抓手中央的相机设备,获取待抓取零件对应的零件图像信息;
4、基于所述多轴机械臂设备的设备姿态,根据所述零件图像信息、机械臂坐标系和相机坐标系,确定目标旋转平移矩阵,其中,所述设备姿态包括初始姿态和其他姿态;
5、根据所述目标旋转平移矩阵,控制所述多轴机械臂设备抓取所述待抓取零件。
6、根据本发明的另一方面,提供了一种机械臂抓取零件装置,该装置包括:
7、零件图像信息获取模块,用于基于安装于多轴机械臂设备末端抓手中央的相机设备,获取待抓取零件对应的零件图像信息;
8、旋转平移矩阵确定单元,用于基于所述多轴机械臂设备的设备姿态,根据所述零件图像信息、机械臂坐标系和相机坐标系,确定目标旋转平移矩阵,其中,所述设备姿态包括初始姿态和其他姿态;
9、机械臂抓取执行模块,用于根据所述目标旋转平移矩阵,控制所述多轴机械臂设备抓取所述待抓取零件。
10、根据本发明的另一方面,提供了一种电子设备,所述电子设备包括:
11、至少一个处理器;以及
12、与所述至少一个处理器通信连接的存储器;其中,
13、所述存储器存储有可被所述至少一个处理器执行的计算机程序,所述计算机程序被所述至少一个处理器执行,以使所述至少一个处理器能够执行本发明任一实施例所述的机械臂抓取零件方法。
14、根据本发明的另一方面,提供了一种计算机可读存储介质,所述计算机可读存储介质存储有计算机指令,所述计算机指令用于使处理器执行时实现本发明任一实施例所述的机械臂抓取零件方法。
15、本发明实施例的技术方案,通过基于安装于多轴机械臂设备末端抓手中央的相机设备,获取待抓取零件对应的零件图像信息。基于所述多轴机械臂设备的设备姿态,根据所述零件图像信息、机械臂坐标系和相机坐标系,确定目标旋转平移矩阵,其中,所述设备姿态包括初始姿态和其他姿态;根据所述目标旋转平移矩阵,控制所述多轴机械臂设备抓取所述待抓取零件,从而可以合并机械臂坐标系和相机坐标系,实现通过视觉图像控制多轴机械臂,进而提高多轴机械臂的自动化程度,提升使用体验。
16、应当理解,本部分所描述的内容并非旨在标识本发明的实施例的关键或重要特征,也不用于限制本发明的范围。本发明的其它特征将通过以下的说明书而变得容易理解。
技术特征:
1.一种机械臂抓取零件方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,所述机械臂坐标系和所述相机坐标系,通过如下方式构建:
3.根据权利要求1所述的方法,其特征在于,在所述设备姿态为初始姿态的情况下,所述根据所述零件图像信息、机械臂坐标系和相机坐标系,确定目标旋转平移矩阵,包括:
4.根据权利要求3所述的方法,其特征在于,所述根据所述零件图像信息,确定所述多轴机械臂设备的首端底座与所述相机设备之间的设备相对位置信息,包括:
5.根据权利要求1所述的方法,其特征在于,在所述设备姿态为其他姿态的情况下,所述根据所述零件图像信息、机械臂坐标系和相机坐标系,确定目标旋转平移矩阵,包括:
6.根据权利要求5所述的方法,其特征在于,所述确定所述多轴机械臂设备的轴臂移动信息,包括:
7.根据权利要求6所述的方法,其特征在于,所述根据所述轴臂移动信息和所述零件图像信息,确定所述机械臂坐标系与所述相机坐标系之间的第二旋转矩阵,包括:
8.一种机械臂抓取零件装置,其特征在于,包括:
9.一种电子设备,其特征在于,所述电子设备包括:
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质存储有计算机指令,所述计算机指令用于使处理器执行时实现权利要求1-7中任一项所述的机械臂抓取零件方法。
技术总结
本发明公开了一种机械臂抓取零件方法、装置、设备及存储介质。该方法包括:基于安装于多轴机械臂设备末端抓手中央的相机设备,获取待抓取零件对应的零件图像信息;基于所述多轴机械臂设备的设备姿态,根据所述零件图像信息、机械臂坐标系和相机坐标系,确定目标旋转平移矩阵,其中,所述设备姿态包括初始姿态和其他姿态;根据所述目标旋转平移矩阵,控制所述多轴机械臂设备抓取所述待抓取零件,可以合并机械臂坐标系和相机坐标系,实现通过视觉图像控制多轴机械臂,进而提高多轴机械臂的自动化程度,提升使用体验。
技术研发人员:郭希义,徐铂裕,黄立,黄佳明,姚文锋,刘永兴,邱树立,张帆,郭国强,饶育平,韩竞魁,王育青,张金粟,林冬钿
受保护的技术使用者:广东电网有限责任公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!