伸缩倒钩式避障爬网机器人及其爬网方法
本发明涉及机器人领域,尤其是涉及一种伸缩倒钩式避障爬网机器人以及该机器人的爬网方法。
背景技术:
1、现有的攀爬机器人常附着于光滑的镜面,以及金属面等光滑材质上进行攀爬,常采用吸盘吸附或粘性材质粘黏等方式进行吸附,但是,对于锚网表面上的攀爬,现有的吸附装置往往难以胜任。
2、现有的爬网机器人,如申请号cn201910697147.3的发明专利公开的“一种可避障的爬网机器人”,该技术方案采用四个机械手爪分别穿越网孔后,在网孔背侧张开进行挂网,然后四爪交替穿过网孔进行爬网行驶。
3、如申请号cn201510209264.2的发明专利公开的“一种蛇形爬网机器人及其爬网方法”,该技术方案公开了一种仿生机器人,依据倒钩进行挂网,仿照生物蛇的行驶方法在网上行驶。
4、但是,上述技术方案中,两种爬网机器人对网孔的大小、网孔之间的间隔要求较高,要求位置较精确。而实际应用场景中,爬网的网孔大小、网孔间隔均存在较大差异,从而导致现有的爬网机器人攀爬效果不佳。
技术实现思路
1、本发明的其中一个目的是提供一种伸缩倒钩式避障爬网机器人,从根本上解决上述问题。通过设置爬网机械臂爪,实现机器人在网上的攀爬与避障。
2、为实现上述目的,本次发明提供了如下技术方案:该伸缩倒钩式避障爬网机器人,包括刚性的机器人躯体、装配在同侧的三个以上的行驶机械臂以及一个以上的悬挂机械臂,其技术要点是:
3、行驶机械臂包括、用于驱动行驶机械爪组件绕第一传动轴旋转的第一驱动组件、用于驱动行驶机械爪组件绕第二传动轴旋转的第二驱动组件、用于驱动行驶机械爪组件绕第三传动轴旋转的第三驱动组件以及用于爬网的行驶机械爪组件;
4、第一驱动组件包括由第一驱动电机驱动的第一传动轴;
5、第二驱动组件包括由第二驱动电机驱动的并与第二传动轴同步旋转的伸缩装置;
6、第三驱动组件包括由第三驱动电机驱动的第三传动轴;
7、悬挂机械臂包括由第四驱动电机驱动旋转的悬挂机械爪组件;
8、悬挂机械爪组件或行驶机械爪组件包括与第四传动轴或第三传动轴同轴设置的同步动作的下爪盘组件和上爪盘组件,下爪盘组件或上爪盘组件各包括通过太阳轮轴承配合在第三传动轴上的设有速度传感器的行星架、通过太阳轮轴承或行星轮轴承配合在行星架上的行星轮组件、配合在行星轮组件外侧的外齿圈、一对相对固定在外齿圈上的伸缩抓钩、设有传感器的上爪盘壳体。
9、进一步的,下爪盘组件的下爪盘伸缩抓钩和上爪盘组件的上爪盘伸缩抓钩的倒钩沿同一周向设置,并且倒钩所在边围成矩形。
10、本发明的另一个目的是提供上述伸缩倒钩式避障爬网机器人的爬网方法,其技术要点是,包括以下步骤:
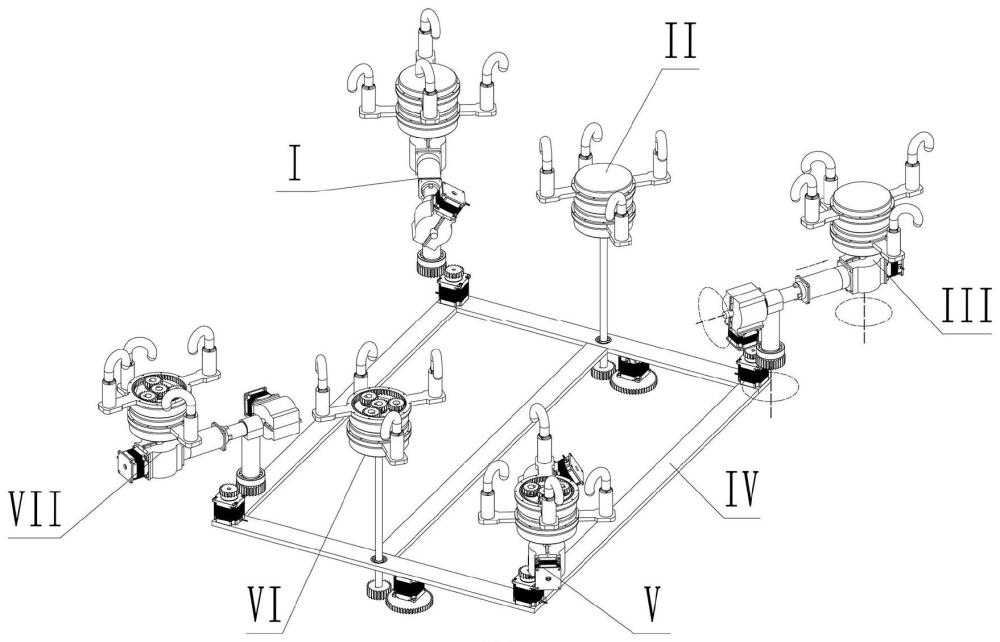
11、步骤s1,通过前端行驶机械臂ⅰ、ⅲ,后端行驶机械臂ⅴ、ⅶ,前、后端悬挂机械臂ⅱ、ⅵ将机器人各机械臂的伸缩抓钩穿过对应节点周围的四个网孔后,挂载在刚性丝网上,各行驶机械臂ⅰ、ⅲ、ⅴ、ⅶ的第二驱动组件朝向机器人躯体ⅳ外侧;
12、步骤s2,前端行驶机械臂ⅰ、ⅲ通过各自的伸缩装置向前伸长,带动相应的行驶机械爪组件向前延伸向前并抓网,同时,前、后端悬挂机械臂ⅱ、ⅳ脱网;
13、步骤s3,前端行驶机械臂ⅰ、ⅲ通过各自的伸缩装置向前缩短,后端行驶机械臂ⅴ、ⅶ通过各自的伸缩装置伸长,机器人躯体ⅳ向前移动,前、后端悬挂机械臂ⅱ、ⅵ重新爪网;
14、步骤s4,后端行驶机械臂ⅴ、ⅶ脱网,通过第一驱动电机驱动相应侧的行驶机械爪组件向外侧和前侧旋转并重新抓网,通过控制该后端行驶机械臂ⅴ、ⅶ的第二驱动组件的旋转角度即可实现机器人躯体ⅳ的旋转,悬挂机械臂ⅱ、ⅳ脱网;
15、步骤s5,通过前端行驶机械臂ⅰ、ⅲ和后端行驶机械臂ⅴ、ⅶ的第一驱动电机驱动相应侧的行驶机械爪组件配合伸缩装置的伸缩同时向外侧和后侧旋转,使机器人整体向前移动,悬挂机械臂ⅱ、ⅳ重新抓网;
16、步骤s6,前端行驶机械臂ⅰ、ⅲ脱网,通过第一驱动电机驱动相应侧的行驶机械爪组件向外侧和前侧旋转至前端行驶机械臂ⅰ、ⅲ的第二驱动组件处于步骤s或步骤s的初始位置并重新抓网,悬挂机械臂ⅱ、ⅳ脱网;
17、步骤s7,前端行驶机械臂ⅰ、ⅲ通过各自的伸缩装置向前缩短,后端行驶机械臂ⅴ、ⅶ通过各自的伸缩装置向前伸长,机器人躯体ⅳ向前移动,悬挂机械臂ⅱ、ⅳ重新抓网。
18、步骤s8,不断重复步骤s2~步骤s7,即可实现机器人在刚性丝网上不断向前移动。
19、进一步的,抓网时,将下爪盘伸缩抓钩和上爪盘伸缩抓钩前端的倒钩对准同一节点周围的四个网孔,通过可伸缩的倒钩伸长后穿越网孔,通过第三驱动电机或第四驱动电机驱动的下爪盘伸缩抓钩和上爪盘伸缩抓钩绕第三传动轴旋转,使机械抓钩倒钩反向贴近刚性丝网,然后通过收缩下爪盘伸缩抓钩或上爪盘伸缩抓钩,使倒钩挂在刚性丝网上,使网格节点的中心与上爪盘壳体中心接近或重合。
20、整体技术方案上,本发明的爬网机器人包括机器人躯体、设置在机器人躯体上的行驶机械臂和悬挂机械臂。其中,行驶机械臂由三个电机分别驱动,并使得第二传动轴分别与第一传动轴和第三传动轴相互垂直,从而使行驶机械爪组件获得多个自由度。通过在第二传动轴的轴线上设置伸缩装置,使得第三传动轴可相对于第一传动轴伸缩,使行驶机械爪组件获得另一个动作自由度。
21、行驶机械爪组件通过同轴设置的同步动作的下爪盘组件和上爪盘组件,实现下爪盘伸缩抓钩6或上爪盘伸缩抓钩的旋转锁定,从而实现机器人的挂网和脱网。再利用机械臂伸缩与旋转实现机器人在刚性丝网上的移动。通过在抓钩另一侧的机器人躯体上进一步设置摄像头或激光雷达、控制主板等元件,即可配合行驶机械臂实现避障功能。在爬网机器人的躯体外壳上还可安装摄像头、传感器、机械臂等部件,从而实现爬网机器人对不同环境的巡检、检测、爬网作业等功能。
技术特征:
1.一种伸缩倒钩式避障爬网机器人,包括刚性的机器人躯体、装配在同侧的三个以上的行驶机械臂以及一个以上的悬挂机械臂,其特征在于:
2.根据权利要求1所述的伸缩倒钩式避障爬网机器人,其特征在于:下爪盘组件(32)的下爪盘伸缩抓钩(326)和上爪盘组件(33)的上爪盘伸缩抓钩(336)的倒钩沿同一周向设置,并且倒钩所在边围成矩形。
3.一种权利要求1所述的伸缩倒钩式避障爬网机器人的爬网方法,其特征在于,包括以下步骤:
4.根据权利要求3所述的伸缩倒钩式避障爬网机器人的爬网方法,其特征在于:抓网时,将下爪盘伸缩抓钩(326)和上爪盘伸缩抓钩(336)前端的倒钩对准同一节点周围的四个网孔,通过可伸缩的倒钩伸长后穿越网孔,通过第三驱动电机(251)或第四驱动电机(41)驱动的下爪盘伸缩抓钩(326)和上爪盘伸缩抓钩(336)绕第三传动轴(31)旋转,使机械抓钩倒钩反向贴近刚性丝网,然后通过收缩下爪盘伸缩抓钩(326)或上爪盘伸缩抓钩(336),使倒钩挂在刚性丝网上,使网格节点的中心与上爪盘壳体(331)中心接近或重合。
技术总结
一种伸缩倒钩式避障爬网机器人及其爬网方法,包括刚性的机器人躯体、装配在同侧的三个以上的行驶机械臂以及一个以上的悬挂机械臂,其技术要点是:行驶机械臂包括、用于驱动行驶机械爪组件(3)绕第一传动轴(12)旋转的第一驱动组件(1)、用于驱动行驶机械爪组件(3)绕第二传动轴(22)旋转的第二驱动组件(2)、用于驱动行驶机械爪组件(3)绕第三传动轴(31)旋转的第三驱动组件(25)以及用于爬网的行驶机械爪组件(3)。通过设置爬网机械臂爪,实现机器人在网上的攀爬与避障。
技术研发人员:田立勇,李鸣昊,张海建,包佳豪,王泽,孙宏宇,董成,张体霖
受保护的技术使用者:辽宁工程技术大学
技术研发日:
技术公布日:2024/2/19
- 还没有人留言评论。精彩留言会获得点赞!