一种用于连续臂骨架内的可变刚度模块的制作方法
本发明涉及机器人相关,具体涉及一种用于连续臂骨架内的可变刚度模块。
背景技术:
1、传统刚性机器人经历了半个世纪的发展,已经十分成熟,并且随着科技的发展和生活水平的提高,如今机器人的应用不仅运用在工业领域,还可以进入生活,得到更加实际的运用,软体机器人与传统的刚性机器人相比,软体机器人具有超冗余自由度、灵活的运动和操作能力,能够适应复杂多变的各类应用环境和任务,正因为他们的适应性和安全操作,特别是涉及到人类,因此,软体机器人可以在非结构化地形的移动或导航中得到应用,并且成为精确定位的机械臂,但是,软体机器人也给设计、制造和控制带来了新的挑战,关键挑战之一是建模和控制软体机器人的运动和刚度,因为这一挑战,软体机器人一直无法在生活中得到广泛的应用,如何能够让软体机器人在不改变其高柔性和无限自由特点的同时可以快速的提高其刚度,是本发明需要解决的问题。
技术实现思路
1、针对现有技术的不足,本发明提供了一种用于连续臂骨架内的可变刚度模块,解决了背景技术中提到的问题。
2、为实现以上目的,本发明通过以下技术方案予以实现:
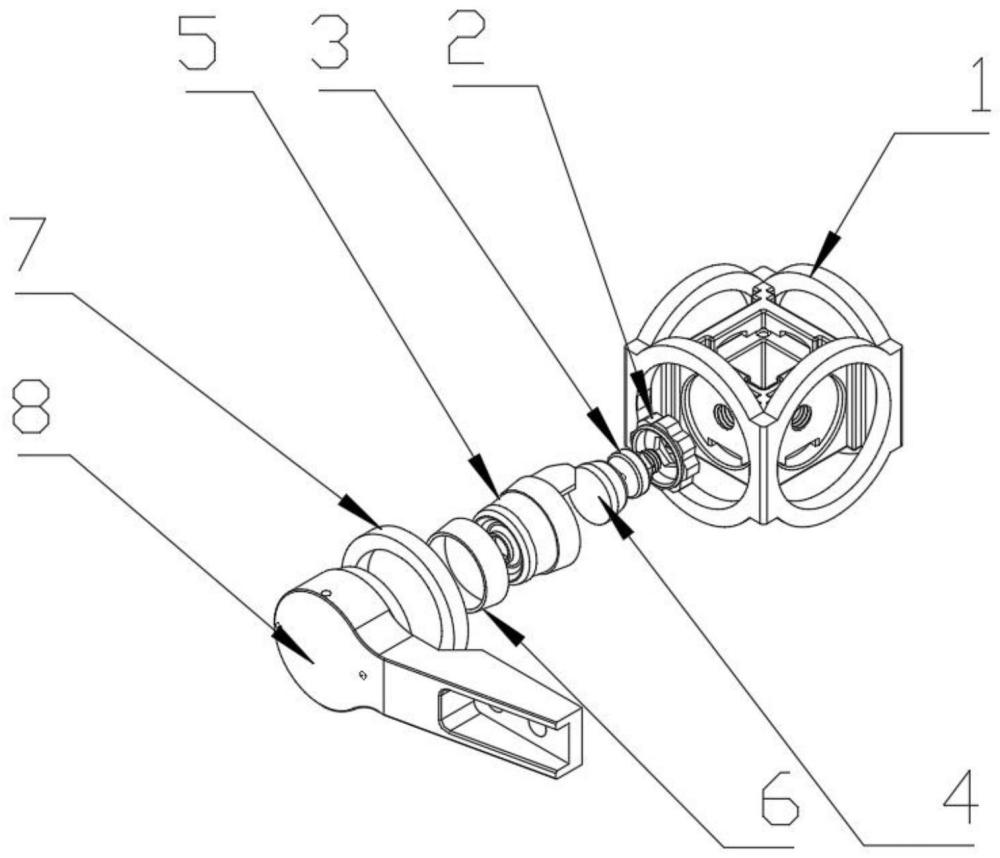
3、一种用于连续臂骨架内的可变刚度模块,包括十字轴承,所述十字轴承内开设有椭圆状的气道,所述气道内安装有气道管;
4、所述十字轴承上均匀开设有四个卡套接触槽,每个所述卡套接触槽的一侧皆设置有螺纹槽,每个所述卡套接触槽的另一侧皆设置有轴承安装槽,每个所述螺纹槽与对应的轴承安装槽皆贯穿开设在十字轴承上,且相邻的螺纹槽、轴承安装槽、卡套接触槽互相连通,每个所述轴承安装槽与对应的螺纹槽之间皆设置有可变刚度配合件。
5、进一步的,所述十字轴承上开设有上下两个气管通孔,位于上方的气管通孔与气源设备连通,位于下方的所述气管通孔密封设置,且所述气管通孔与气道管连通。
6、进一步的,所述可变刚度配合件包括气管卡套、轴承、骨架环锥,所述气管卡套设于卡套接触槽内并与卡套接触槽为接触设置,所述气管卡套上安装有气管套座,所述气管套座与螺纹槽螺纹连接并与气道管连接;
7、所述气管套座上套设有锥形硅胶气囊,所述锥形硅胶气囊的一侧设置有关节锁紧模块锥台,所述锥形硅胶气囊设于关节锁紧模块锥台内,所述轴承固定安装在轴承安装槽内,所述骨架环锥设于关节锁紧模块锥台的一侧,所述关节锁紧模块锥台上开设有锥台侧面槽,所述锥台侧面槽上套设有锥台摩擦垫,所述骨架环锥上开设有环锥锥面,所述锥台摩擦垫与环锥锥面相配合接触,且所述骨架环锥上开设有环锥-轴承配合面,所述环锥-轴承配合面与轴承内壁固定连接。
8、进一步的,所述气管套座包括气管座,所述气管座内固定安装有外六角安装块,所述外六角安装块远离气管座的一端连通固设有外螺纹气管,所述气管卡套上开设有与外六角安装块相配合的内六角槽,所述外螺纹气管螺纹旋入至螺纹槽内,且所述外螺纹气管上开设有气管套座气道,所述气管套座气道与气道管连通;
9、所述锥形硅胶气囊上开设有锥形硅胶气囊口,所述气管座位于锥形硅胶气囊口内。
10、进一步的,所述关节锁紧模块锥台内壁上固设有两个锥台安装块,所述螺纹槽的两侧皆设置有锥台配合槽,每个所述锥台安装块皆配合卡紧至对应的锥台配合槽内,且所述关节锁紧模块锥台的外表面位于卡套接触槽内,所述气管卡套位于关节锁紧模块锥台内。
11、进一步的,所述气管卡套的外表面圆周阵列开设有若干个外接卡口。
12、进一步的,所述锥形硅胶气囊与锥台摩擦垫皆由硅胶浇筑成型。
13、进一步的,所述骨架环锥上开设有若干个环锥通孔,所述环锥-轴承配合面的一侧设置有环锥气管接口,所述环锥气管接口开设在骨架环锥上。
14、进一步的,所述十字轴承的中部开设有管线走线槽。
15、本发明提供了一种用于连续臂骨架内的可变刚度模块。与现有技术相比,具备以下有益效果:
16、本发明设计的可变刚度模块主要依赖于关节锁紧模块锥台、锥台摩擦垫、骨架环锥、气管套座和锥形硅胶气囊等结构的相互配合,本发明设计的可变刚度模块是一种可以根据应用需求调整刚度的结构模块,它可以通过改变其物理属性来实现刚度的变化,当运用于连续臂骨架能够实现快速高效的改变软体机器人在运动中的刚度,运动到精确的位置并保证人类的安全性。
技术特征:
1.一种用于连续臂骨架内的可变刚度模块,包括十字轴承(1),其特征在于:所述十字轴承(1)内开设有椭圆状的气道,所述气道内安装有气道管(16);
2.根据权利要求1所述的一种用于连续臂骨架内的可变刚度模块,其特征在于:所述十字轴承(1)上开设有上下两个气管通孔(17),位于上方的气管通孔(17)与气源设备连通,位于下方的所述气管通孔(17)密封设置,且所述气管通孔(17)与气道管(16)连通。
3.根据权利要求1所述的一种用于连续臂骨架内的可变刚度模块,其特征在于:所述可变刚度配合件包括气管卡套(2)、轴承(7)、骨架环锥(8),所述气管卡套(2)设于卡套接触槽(11)内并与卡套接触槽(11)为接触设置,所述气管卡套(2)上安装有气管套座(3),所述气管套座(3)与螺纹槽(12)螺纹连接并与气道管(16)连接;
4.根据权利要求3所述的一种用于连续臂骨架内的可变刚度模块,其特征在于:所述气管套座(3)包括气管座(34),所述气管座(34)内固定安装有外六角安装块(33),所述外六角安装块(33)远离气管座(34)的一端连通固设有外螺纹气管(32),所述气管卡套(2)上开设有与外六角安装块(33)相配合的内六角槽(21),所述外螺纹气管(32)螺纹旋入至螺纹槽(12)内,且所述外螺纹气管(32)上开设有气管套座气道(31),所述气管套座气道(31)与气道管(16)连通;
5.根据权利要求3所述的一种用于连续臂骨架内的可变刚度模块,其特征在于:所述关节锁紧模块锥台(5)内壁上固设有两个锥台安装块(51),所述螺纹槽(12)的两侧皆设置有锥台配合槽(13),每个所述锥台安装块(51)皆配合卡紧至对应的锥台配合槽(13)内,且所述关节锁紧模块锥台(5)的外表面位于卡套接触槽(11)内,所述气管卡套(2)位于关节锁紧模块锥台(5)内。
6.根据权利要求5所述的一种用于连续臂骨架内的可变刚度模块,其特征在于:所述气管卡套(2)的外表面圆周阵列开设有若干个外接卡口(22)。
7.根据权利要求3所述的一种用于连续臂骨架内的可变刚度模块,其特征在于:所述锥形硅胶气囊(4)与锥台摩擦垫(6)皆由硅胶浇筑成型。
8.根据权利要求3所述的一种用于连续臂骨架内的可变刚度模块,其特征在于:所述骨架环锥(8)上开设有若干个环锥通孔(84),所述环锥-轴承配合面(83)的一侧设置有环锥气管接口(82),所述环锥气管接口(82)开设在骨架环锥(8)上。
9.根据权利要求1所述的一种用于连续臂骨架内的可变刚度模块,其特征在于:所述十字轴承(1)的中部开设有管线走线槽(15)。
技术总结
本发明提供了一种用于连续臂骨架内的可变刚度模块,包括十字轴承,十字轴承内开设有椭圆状的气道,气道内安装有气道管;十字轴承上均匀开设有四个卡套接触槽,每个卡套接触槽的一侧皆设置有螺纹槽,每个卡套接触槽的另一侧皆设置有轴承安装槽,每个螺纹槽与对应的轴承安装槽皆贯穿开设在十字轴承上,且相邻的螺纹槽、轴承安装槽、卡套接触槽互相连通,每个轴承安装槽与对应的螺纹槽之间皆设置有可变刚度配合件。本发明通过各结构之间的配合设置,可通过改变其物理属性来实现刚度的变化,当运用于连续臂骨架能够实现快速高效的改变软体机器人在运动中的刚度,运动到精确的位置并保证人类的安全性。
技术研发人员:鲍官军,梅洁,王文彪
受保护的技术使用者:杭州闻名智能科技有限公司
技术研发日:
技术公布日:2024/1/22
- 还没有人留言评论。精彩留言会获得点赞!