一种机器狗校准架及校准方法
本发明涉及机器人,具体涉及一种机器狗校准架及校准方法。
背景技术:
1、随着机器人技术的不断发展,越来越多的机器人出现在人们的日常生活中,例如四足机器人,或者说机器狗越来越普遍。为了保证机器人的使用精度,需要对其进行校正,例如,在进行更换电机或机械系统零部件之后,超越机械极限位置之后,或者进行出厂设置时,都需要对机器人进行校准。
2、以微型四足机器人bittle为例,其主要运动部分为大腿和小腿等,分别由相应伺服舵机进行驱动,但齿轮传动可能导致大腿和小腿应在零点位置时而不在,进而导致执行后续动作时,步态和姿势的稳定性降低。目前对类似四足机器人的校准方法主要为,使大腿和小腿等部分复位,二者形成l形结构,然后用一个l形工具作为参考,通过人眼观察偏转角度,最后基于该偏转角度对大腿和小腿的驱动电机进行角度调节,以实现校准,但是这种方法不仅耗时较长,且精度较低。
技术实现思路
1、针对现有技术的不足,本发明提供一种机器狗校准架及校准方法。
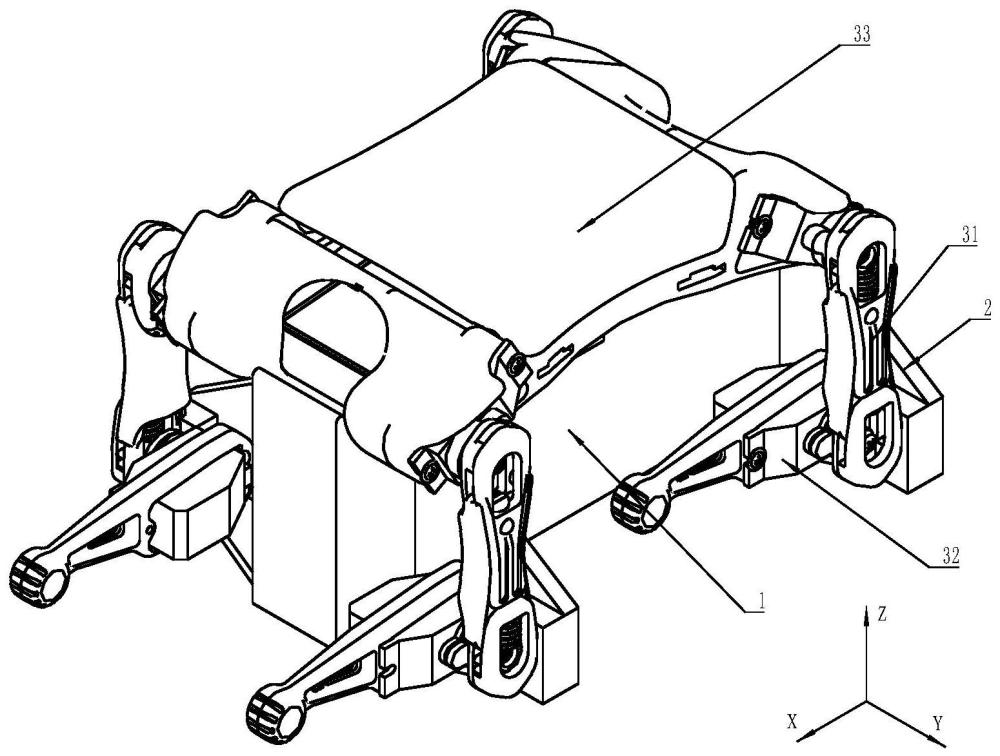
2、第一方面,本发明提供了一种机器狗校准架,其包括躯干支撑部和腿部支撑部,所述腿部支撑部包括相互连接的大腿支撑板和小腿支撑板,所述小腿支撑板垂直连接于所述躯干支撑部的侧面并与所述躯干支撑部的顶面平行,所述大腿支撑板垂直连接于所述躯干支撑部的侧面并与所述躯干支撑部的顶面垂直,所述躯干支撑部的顶面用于与机器狗的躯干的底面接触,所述大腿支撑板用于与所述机器狗的大腿的后面接触,所述小腿支撑板用于与所述机器狗的小腿的底面接触。
3、进一步,所述躯干支撑部包括躯干支撑本体、躯干纵向限位结构和躯干横向限位结构,两个所述躯干纵向限位结构分别设置于所述躯干支撑本体的顶面的纵向两端,两个所述躯干纵向限位结构的间距与所述机器狗的底面纵向尺寸相匹配,两个所述躯干横向限位结构分别设置于所述躯干支撑本体的顶面的横向两端,两个所述躯干横向限位结构的间距与所述机器狗的底面横向尺寸相匹配。
4、进一步,所述躯干纵向限位结构与所述躯干支撑本体平滑过渡连接,和/或,所述躯干横向限位结构与所述躯干支撑本体平滑过渡连接。
5、进一步,所述腿部支撑部还包括腿部横向限位结构,所述腿部横向限位结构与所述大腿支撑板和/或所述小腿支撑板连接,且位于所述腿部支撑部远离所述躯干支撑部的一端。
6、第二方面,本发明提供了一种机器狗校准方法,基于如上所述的机器狗校准架,所述机器狗校准方法包括:
7、当机器狗匹配放置于所述机器狗校准架上时,控制所述机器狗的大腿沿第一方向转动第一设定角度,其中,所述第一设定角度大于预设最大偏转角度;
8、控制所述机器狗的大腿沿第二方向逐次转动预设分度角,其中,所述第二方向与所述第一方向相反,所述预设分度角小于所述第一设定角度,并获取每转动一次所述预设分度角时所述机器狗的角速度信息;
9、根据所述角速度信息确定所述机器狗的大腿是否与所述机器狗校准架的大腿支撑板发生碰撞;
10、当确定发生碰撞时,根据所述第一设定角度和发生碰撞时所转动的所述预设分度角的次数确定所述机器狗的大腿偏转角度;
11、根据所述大腿偏转角度对所述机器狗的大腿进行校准。
12、进一步,所述根据所述角速度信息确定所述机器狗的大腿是否与所述机器狗校准架的大腿支撑板发生碰撞包括:
13、当执行转动所述预设分度角的动作时,获取转动前的前次角速度信息,并获取转动后的后次角速度信息;
14、根据所述前次角速度信息和所述后次角速度信息确定是否发生碰撞。
15、进一步,所述角速度信息包括横向角速度、纵向角速度和竖向角速度中的至少一者;当所述角速度信息包括横向角速度和纵向角速度时,所述根据所述前次角速度信息和所述后次角速度信息确定是否发生碰撞包括:
16、确定后次横向角速度与前次横向角速度的第一差值,以及后次纵向角速度与前次纵向角速度的第二差值,确定所述第一差值与所述第二差值的平方和的开方值;
17、当所述开方值大于或等于预设阈值时,确定发生碰撞。
18、进一步,所述根据所述第一设定角度和发生碰撞时所转动的所述预设分度角的次数确定所述机器狗的大腿偏转角度包括:
19、当转动所述预设分度角达到所述第一预设角度且还未发生碰撞时,继续执行转动所述预设分度角的动作并记录第一转动次数,直至发生碰撞,根据所述第一转动次数与所述预设分度角确定所述大腿偏转角度。
20、进一步,所述根据所述第一设定角度和发生碰撞时所转动的所述预设分度角的次数确定所述机器狗的大腿偏转角度还包括:
21、当转动所述预设分度角还未达到所述第一预设角度就发生碰撞时,确定发生碰撞时执行转动所述预设分度角的动作的第二转动次数,根据所述第二转动次数、所述预设分度角与所述第一设定角度确定所述大腿偏转角度。
22、进一步,该方法还包括:
23、当控制所述机器狗的大腿沿所述第一方向转动所述第一设定角度时,控制所述机器狗的小腿沿所述第一方向转动第二设定角度,其中,所述第二设定角度大于所述预设最大偏转角度;
24、控制所述机器狗的小腿沿所述第二方向逐次转动所述预设分度角,其中,所述预设分度角小于所述第二设定角度,并获取每转动一次所述预设分度角时所述机器狗的角速度信息;
25、根据所述角速度信息确定所述机器狗的小腿是否与所述机器狗校准架的小腿支撑板发生碰撞;
26、当确定发生碰撞时,根据所述第二设定角度和发生碰撞时所转动的所述预设分度角的次数确定所述机器狗的小腿偏转角度;
27、根据所述小腿偏转角度对所述机器狗的小腿进行校准。
28、本发明的机器狗校准架及校准方法的有益效果包括:由于需要校准的机器狗的大腿和小腿通常存在一定角度偏差,可将其分别调整设定角度后,放置于校准架,使机器狗的躯干贴合于躯干支撑部,但大腿、小腿不与校准架接触,然后控制大腿或小腿朝向大腿支撑板或小腿支撑板运动,直至发生碰撞,通过前述设定角度以及此时大腿或小腿的转动角度便可确定其偏转角度,进而基于偏转角度进行校准。只需将机器狗放置于校准架上,其他操作可自动完成,且不受人为操作误差影响,校准精度较高,可以实现对机器狗大、小腿驱动电机的高效、准确校准,以确保机器狗精准执行步态动作。
技术特征:
1.一种机器狗校准架,其特征在于,包括躯干支撑部(1)和腿部支撑部(2),所述腿部支撑部(2)包括相互连接的大腿支撑板(21)和小腿支撑板(22),所述小腿支撑板(22)垂直连接于所述躯干支撑部(1)的侧面并与所述躯干支撑部(1)的顶面平行,所述大腿支撑板(21)垂直连接于所述躯干支撑部(1)的侧面并与所述躯干支撑部(1)的顶面垂直,所述躯干支撑部(1)的顶面用于与机器狗的躯干(33)的底面(331)接触,所述大腿支撑板(21)用于与所述机器狗的大腿(31)的后面(311)接触,所述小腿支撑板(22)用于与所述机器狗的小腿(32)的底面(321)接触。
2.根据权利要求1所述的机器狗校准架,其特征在于,所述躯干支撑部(1)包括躯干支撑本体、躯干纵向限位结构(11)和躯干横向限位结构(12),两个所述躯干纵向限位结构(11)分别设置于所述躯干支撑本体的顶面的纵向两端,两个所述躯干纵向限位结构(11)的间距与所述机器狗的底面纵向尺寸相匹配,两个所述躯干横向限位结构(12)分别设置于所述躯干支撑本体的顶面的横向两端,两个所述躯干横向限位结构(12)的间距与所述机器狗的底面横向尺寸相匹配。
3.根据权利要求2所述的机器狗校准架,其特征在于,所述躯干纵向限位结构(11)与所述躯干支撑本体平滑过渡连接,和/或,所述躯干横向限位结构(12)与所述躯干支撑本体平滑过渡连接。
4.根据权利要求1所述的机器狗校准架,其特征在于,所述腿部支撑部(2)还包括腿部横向限位结构(23),所述腿部横向限位结构(23)与所述大腿支撑板(21)和/或所述小腿支撑板(22)连接,且位于所述腿部支撑部(2)远离所述躯干支撑部(1)的一端。
5.一种机器狗校准方法,其特征在于,基于如权利要求1至4任一项所述的机器狗校准架,所述机器狗校准方法包括:
6.根据权利要求5所述的机器狗校准方法,其特征在于,所述根据所述角速度信息确定所述机器狗的大腿(31)是否与所述机器狗校准架的大腿支撑板(21)发生碰撞包括:
7.根据权利要求6所述的机器狗校准方法,其特征在于,所述角速度信息包括横向角速度、纵向角速度和竖向角速度中的至少一者;当所述角速度信息包括横向角速度和纵向角速度时,所述根据所述前次角速度信息和所述后次角速度信息确定是否发生碰撞包括:
8.根据权利要求5所述的机器狗校准方法,其特征在于,所述根据所述第一设定角度和发生碰撞时所转动的所述预设分度角的次数确定所述机器狗的大腿偏转角度包括:
9.根据权利要求8所述的机器狗校准方法,其特征在于,所述根据所述第一设定角度和发生碰撞时所转动的所述预设分度角的次数确定所述机器狗的大腿偏转角度还包括:
10.根据权利要求5至9任一项所述的机器狗校准方法,其特征在于,还包括:
技术总结
本发明涉及一种机器狗校准架及校准方法,属于机器人技术领域,该校准架包括躯干支撑部和腿部支撑部,所述腿部支撑部包括相互连接的大腿支撑板和小腿支撑板,所述小腿支撑板垂直连接于所述躯干支撑部的侧面并与所述躯干支撑部的顶面平行,所述大腿支撑板垂直连接于所述躯干支撑部的侧面并与所述躯干支撑部的顶面垂直,所述躯干支撑部的顶面用于与机器狗的躯干的底面接触,所述大腿支撑板用于与所述机器狗的大腿的后面接触,所述小腿支撑板用于与所述机器狗的小腿的底面接触。本发明提供的技术方案可以实现对机器狗大、小腿驱动电机的高效、准确校准,以确保机器狗精准执行步态动作。
技术研发人员:何凤琴,程轲,李荣仲
受保护的技术使用者:上海师范大学
技术研发日:
技术公布日:2024/4/29
- 还没有人留言评论。精彩留言会获得点赞!