一种多用途机械爪
本发明属于机械爪,尤其涉及一种多用途机械爪。
背景技术:
1、随着时代的发展和科技的创新,绿色环保便捷实用的物品越来越受到各行各业的青睐,机械爪便是其中之一。机械爪的应用越来越广泛,列如应用于建筑工程、塔吊、无人机/有人机、和等其他行业领域,能够有效提高工作效率和安全性。
2、目前普遍认知的机械手爪是由执行机构、驱动系统、控制系统、位置检测装置组成。市面上大部分抓手只有简单的执行机构和驱动系统,其中最典型的是夹持手爪(机构抓取)和吸附手爪(真空或磁力吸取)。
3、夹持式手爪由手指和驱动机构组成,手指与抓取物体直接接触,分成平移型和回转型。手指的具体结构取决于抓取物品表面的形状、尺寸、抓取部位以及重量。常用指型有平面、圆面、曲面、槽型;夹持方式有外持和内撑;指数有单指、双指、多指。而手爪的驱动机构常见的有滑槽式、连杆式、斜面式、齿轮齿条式、丝杆式、重力式等。常见的驱动系统有电机和气缸。
4、吸附式手爪主要由吸盘组成,靠负气压或者电磁磁场吸附物品。负气压手爪常用于吸附薄片状、光滑表面、轻小的材料;电磁手爪常用于吸附可磁化金属或表面有网口的物品。
5、由于不同物品有不同的外形,通常手爪只能抓取特定的或者同一类型的物品,导致抓手的适应性单一,无法灵活应对多变的应用需求。
6、现有设计由于是一个电机驱动三个手爪,致使每个手指不能独立运动,所有手指都要同步运动且所有手指的运动轨迹具有对称性。所以抓手只能抓取形状比较对称的物体,当抓手抓取的物体形状多变,如半径递增的阶梯状传动轴或者是锥状物体,甚至是螃蟹一类的海产,现有的手指运动方式就无法准确和稳定地抓取物品。
技术实现思路
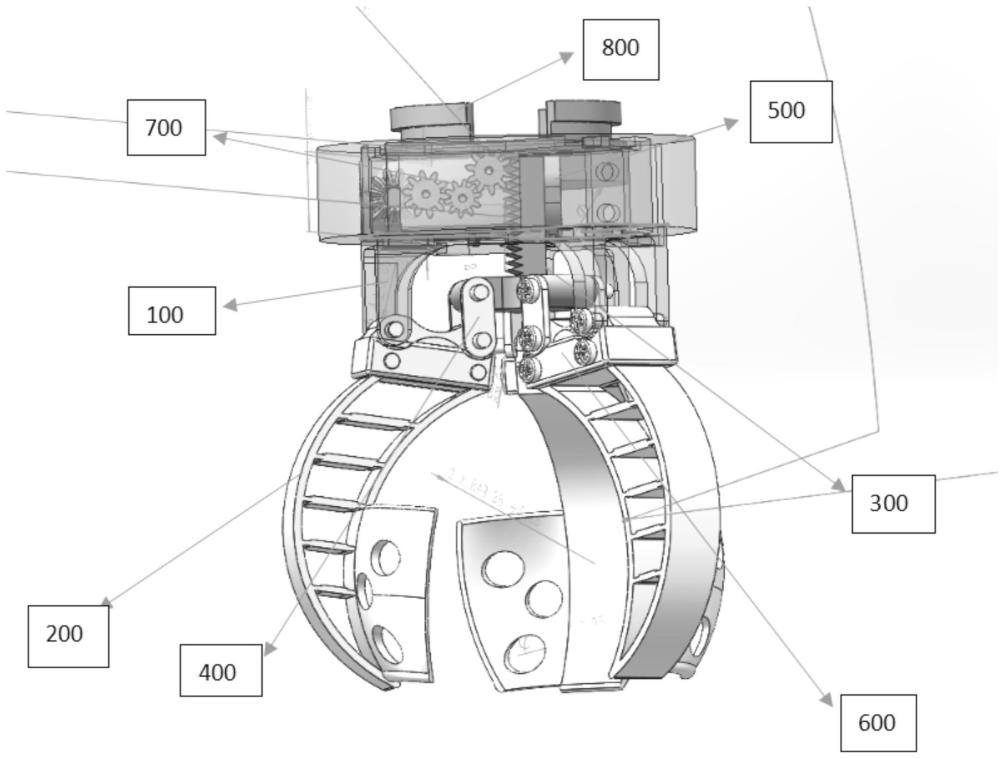
1、为了解决上述背景技术中存在的至少一项技术问题,本发明的第一个方面提供一种多用途机械爪,包括:机械爪上固定座、爪钩、运动平台、连接件、电机、齿轮传动结构、爪钩固定座、连接器a和连接器b;
2、机械爪上固定座与电机和齿轮传动结构连接,机械爪上固定座用于固定电机和齿轮传动结构;爪钩和运动平台连接,爪钩用于安装在运动平台;运动平台和爪钩连接,运动平台带动爪钩完成张开和闭和;电机和齿轮传动结构连接,电机机带齿轮传动结构进行左右转动;齿轮传动结构与运动平台连接;连接件与爪钩和运动平台连接,爪钩固定座与爪钩连接;连接器a与连接器b连接,所述连接器a安装在机械爪上固定座上;所述连接器b安装在机械臂或遥控设备上。
3、进一步的,所述固定座为圆形壳体,固定座顶面设有连接器a,连接器a为四个环状凸起结构,四个环状凸起结构能够配合安装至机械臂端部。
4、进一步的,固定座的下表面设有三个圆周阵列式排布的支架,支架为两个平行布设的矩形凸起,支架端部设有安装孔,两个矩形凸起之间设置抓钩固定座的一端,通过安装孔内设置转轴使得抓钩固定座可以绕支架转动设定角度,抓钩固定座的另一端安装在运动平台的输出端。
5、进一步的,运动平台采用齿轮传动结构,齿轮传动结构包括齿轮和齿条,齿条与齿轮配合,通过齿轮转动从而带动齿条上下移动,齿条的端部安装运动环,运动环的四周铰接连杆的一端,连杆的另一端与抓钩固定座铰接,通过齿轮带动齿条上下移动,进而带动连杆上下移动。
6、本发明的有益效果是:
7、本发明采用齿轮传动结构,齿轮传动结构包括齿轮和齿条,齿条与齿轮配合,通过齿轮转动从而带动齿条上下移动,齿条的端部安装运动环,运动环的四周铰接连杆的一端,连杆的另一端与抓钩固定座铰接,通过齿轮带动齿条上下移动,进而带动连杆上下移动,机械爪可设置航空转换连接器,吊钩挂载连接器,通用连接器,齿轮传动机构,5种抓钩拆卸替换结构,能够以适应更为复杂和高效的航空器设备需求,安全可靠、结构简单、安装方便。
8、本发明附加方面的优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
技术特征:
1.一种多用途机械爪,其特征在于,包括:机械爪上固定座、爪钩、运动平台、连接件、电机、齿轮传动结构、爪钩固定座、连接器a和连接器b;
2.如权利要求1所述的多用途机械爪,其特征在于,所述固定座为圆形壳体,固定座顶面设有连接器a,连接器a为四个环状凸起结构,四个环状凸起结构能够配合安装至机械臂端部。
3.如权利要求2所述的多用途机械爪,其特征在于,固定座的下表面设有三个圆周阵列式排布的支架,支架为两个平行布设的矩形凸起,支架端部设有安装孔,两个矩形凸起之间设置抓钩固定座的一端,通过安装孔内设置转轴使得抓钩固定座可以绕支架转动设定角度,抓钩固定座的另一端安装在运动平台的输出端。
4.如权利要求1所述的多用途机械爪,其特征在于,运动平台采用齿轮传动结构,齿轮传动结构包括齿轮和齿条,齿条与齿轮配合,通过齿轮转动从而带动齿条上下移动,齿条的端部安装运动环,运动环的四周铰接连杆的一端,连杆的另一端与抓钩固定座铰接,通过齿轮带动齿条上下移动,进而带动连杆上下移动。
技术总结
本发明属于机械爪技术领域领域,提供了一种多用途机械爪,包括:机械爪上固定座、爪钩、运动平台、连接件、电机、齿轮传动结构、爪钩固定座、连接器A和连接器B;机械爪上固定座与电机和齿轮传动结构连接,机械爪上固定座用于固定电机和齿轮传动结构;机械爪可设置航空转换连接器,吊钩挂载连接器,通用连接器,齿轮传动机构,5种抓钩拆卸替换结构,能够以适应更为复杂和高效的航空器设备需求,安全可靠、结构简单、安装方便。
技术研发人员:杜迎,张继凯,王征,李易城,杨雪,赵腾
受保护的技术使用者:山东现代物业管理专修学院有限公司
技术研发日:
技术公布日:2024/2/8
- 还没有人留言评论。精彩留言会获得点赞!