一种双定子驱动大扭矩机器人关节
本发明涉及机器人,尤其是指一种双定子驱动大扭矩机器人关节。
背景技术:
1、模块化关节作为机器人产业的核心部件,在工业生产以及仿生机器人等领域有着广泛的应用。模块化关节主要由直流无刷电机、高精度减速机、角度编码器以及电机驱动器组成,是一种高度集成的机械结构。
2、传统的模块化关节通常采用直流无刷电机+减速机+驱动器的串联式布局。直流无刷电机可根据其磁通量的方向可以分为两种类型:第一种是径向磁通电机,它的磁通线垂直于旋转轴;第二种是轴向磁通电机,也叫盘式电机,它的磁通线平行于旋转轴。常见的直流无刷电机多为径向直流无刷电机。而减速机又可分为行星齿轮减速机和摆线针轮减速机等。
3、径向磁通电机具有小体积、低噪音、高转速、高功率密度、散热性好等优点,但是电机功率比轴向电机低一些;而轴向电机虽然功率比较高、扭矩较大,但是因为其扁平的特点,径向尺寸大,导致转动惯量大,最高转速比不上径向电机。
4、常见的减速机有行星齿轮减速机和摆线针轮减速机两种,行星齿轮减速机虽然具有高传动效率、高精度等优点,但是接触齿数少、扭矩密度低、结构复杂、制造安装难度大;而摆线针轮减速器相较行星齿轮减速机有接触齿数多、力矩密度高等优点。
5、传统的一体化集成式关节通常采用径向直流无刷电机+行星齿轮减速器+驱动器或者是径向直流无刷电机+摆线针轮减速器+驱动器的布局。对于前一种布局,由于行星齿轮减速机扭矩密度低,想要获得更大的扭矩,关节整体体积也会变大;对于后一种布局,虽然,力矩密度高,但是电机功率成为瓶颈。而且传统布局的关节角度编码器等电气部件大多外露,结构复杂,集成度差。
技术实现思路
1、为此,本发明所要解决的技术问题在于克服现有技术中一体化集成式关节目前的结构设计不合理,存在体积大或者结构复杂等问题。
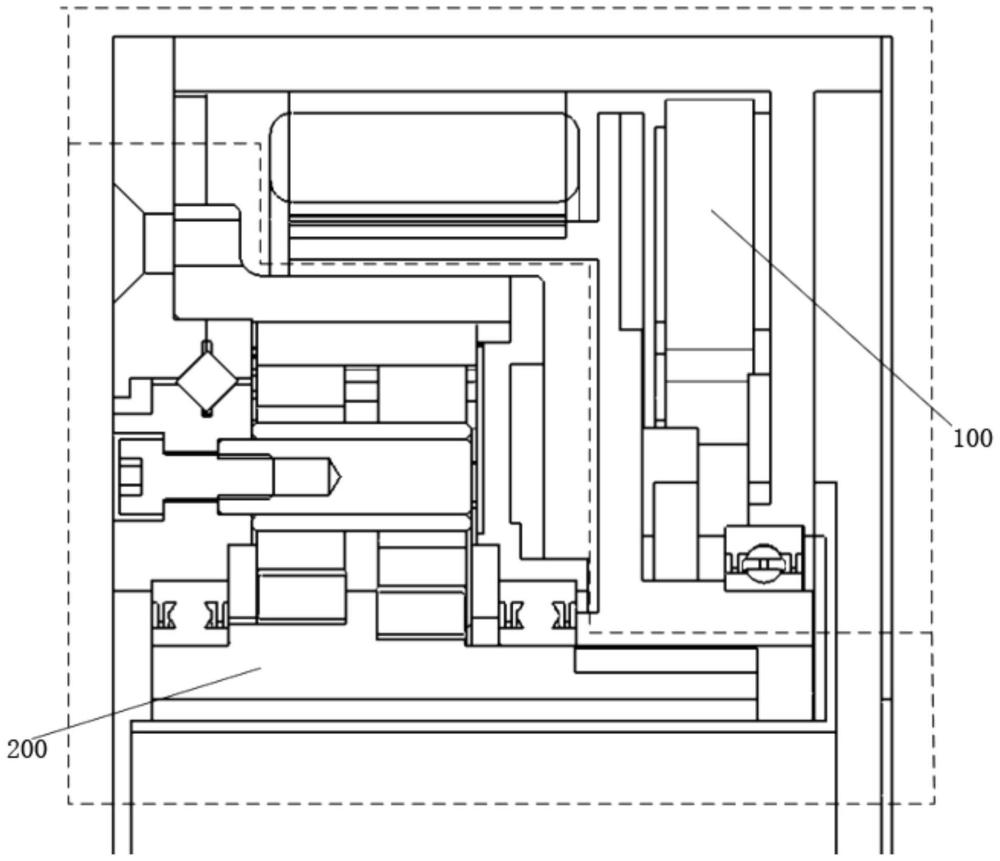
2、为解决上述技术问题,本发明提供了一种双定子驱动大扭矩机器人关节,包括:双定子驱动模块和摆线针轮减速机模块,所述双定子驱动模块和摆线针轮减速机模块装配在一起构成机器人关节;所述双定子驱动模块包括关节外壳、永磁体阵列一、永磁体阵列二、永磁体阵列三、径向铁芯、径向线圈、端部铁芯、端部线圈、输入轴、关节盖、走线管和轴承一,所述关节外壳为圆筒状,所述关节盖设置在关节外壳轴线方向的一端,所述输入轴设置在关节外壳内,并且输入轴和关节外壳同轴设置,所述走线管的一端与关节外壳连接,并且走线管贯穿输入轴,所述走线管位于输入轴的中心线位置处,所述径向铁芯设置在关节外壳的内壁上,所述径向线圈设置于径向铁芯上,所述永磁体阵列一设置在输入轴一端的圆周外壁上,并且永磁体阵列一磁化方向为径向,所述永磁体阵列二和永磁体阵列三同设在输入轴的径向端面上,并且永磁体阵列二和永磁体阵列三磁化方向均为轴向,所述永磁体阵列二所在圆周位于永磁体阵列三圆周的外侧,所述端部铁芯与关节外壳的径向端面连接,所述端部线圈套设在端部铁芯上,所述轴承一套设在输入轴上,并且输入轴通过轴承一与关节外壳连接;所述摆线针轮减速机模块包括曲柄轴、轴承钢套、圆柱销、摆线齿一、摆线齿二、内齿圈、后挡板、圆柱滚子和轴承二,所述曲柄轴的一端插入输入轴内,并且曲柄轴轴线方向的一端设有轴承二,所述摆线齿一和摆线齿二均与曲柄轴连接,并且曲柄轴驱动摆线齿一和摆线齿二进行圆周运动,所述后挡板通过轴承二和曲柄轴连接,所述轴承钢套套设在圆柱销上,并且圆柱销贯穿摆线齿一和摆线齿二,所述内齿圈通过圆柱滚子和摆线齿一、摆线齿二连接。本发明所述的双定子驱动大扭矩机器人关节,采用电机和减速器径向嵌套的布局方式,同时实现电气连接集成于结构内部,采用了中空走线的方式,集成式驱动板内置在关节外壳中,增加线的条理性、可靠性,同时缩小轴向空间,避免出线被拖拽扯断的风险。提出一种双定子驱动大扭矩机器人关节,通过圆周、端部双定子,增大驱动力矩和输出力矩,同时可减小力矩波动、拓宽关节转速范围,提高内部空间利用率。面向高动态足式机器人,适应其力矩大、冲击大、速度快等需求。
3、在本发明的一个实施例中,所述关节外壳上设有驱动电路板。
4、在本发明的一个实施例中,所述关节外壳上设有传感器。
5、在本发明的一个实施例中,所述曲柄轴轴线方向远离轴承二的一端设有轴承三。
6、在本发明的一个实施例中,所述轴承三的外圈上连接有输出盘,所述输出盘通过螺钉与圆柱销连接。
7、在本发明的一个实施例中,所述输出盘的外圆周上设有交叉滚子轴承。
8、在本发明的一个实施例中,所述机器人关节还包括关节外端盖,所述关节外端盖设置在关节外壳远离关节盖的一端,并且关节外端盖通过交叉滚子轴承和输出盘连接。
9、在本发明的一个实施例中,所述关节外端盖和输出盘之间的缝隙位置处设有密封环。
10、在本发明的一个实施例中,所述曲柄轴和走线管之间设有间隙。
11、在本发明的一个实施例中,所述传感器用于检测永磁体阵列三的转动角度信息。
12、本发明的上述技术方案相比现有技术具有以下优点:
13、1、关节前中部为摆线针轮减速机,径向外圈和后端部为输入轴,输入轴上布置有三组永磁体阵列,用于驱动关节和角度检测。
14、2、关节的外周和后端部设置有两套定子线圈,可独立控制用于产生电磁驱动力;
15、3、关节输入轴的圆周和后端面都设置有永磁体阵列。关节输入轴圆周永磁体阵列采用径向充磁,与关节外周的定子线圈产生电磁耦合力驱动曲柄轴转动。关节输入轴后端有两圈永磁体阵列采用轴向充磁,其中一圈与关节后端面的定子线圈产生电磁耦合力驱动曲柄轴,另一圈用于检测输入轴的角度信息,作为驱动器的位置反馈。三组永磁体阵列之间具有确定的相位关系。
技术特征:
1.一种双定子驱动大扭矩机器人关节,其特征在于,包括:双定子驱动模块和摆线针轮减速机模块,所述双定子驱动模块和摆线针轮减速机模块装配在一起构成机器人关节;
2.根据权利要求1所述的双定子驱动大扭矩机器人关节,其特征在于:所述关节外壳上设有驱动电路板。
3.根据权利要求1或2所述的双定子驱动大扭矩机器人关节,其特征在于:所述关节外壳上设有传感器。
4.根据权利要求1所述的双定子驱动大扭矩机器人关节,其特征在于:所述曲柄轴轴线方向远离轴承二的一端设有轴承三。
5.根据权利要求4所述的双定子驱动大扭矩机器人关节,其特征在于:所述轴承三的外圈上连接有输出盘,所述输出盘通过螺钉与圆柱销连接。
6.根据权利要求5所述的双定子驱动大扭矩机器人关节,其特征在于:所述输出盘的外圆周上设有交叉滚子轴承。
7.根据权利要求6所述的双定子驱动大扭矩机器人关节,其特征在于:所述机器人关节还包括关节外端盖,所述关节外端盖设置在关节外壳远离关节盖的一端,并且关节外端盖通过交叉滚子轴承和输出盘连接。
8.根据权利要求7所述的双定子驱动大扭矩机器人关节,其特征在于:所述关节外端盖和输出盘之间的缝隙位置处设有密封环。
9.根据权利要求1所述的双定子驱动大扭矩机器人关节,其特征在于:所述曲柄轴和走线管之间设有间隙。
10.根据权利要求3所述的双定子驱动大扭矩机器人关节,其特征在于:所述传感器用于检测永磁体阵列三的转动角度信息。
技术总结
本发明涉及一种双定子驱动大扭矩机器人关节,包括:双定子驱动模块和摆线针轮减速机模块;双定子驱动模块包括关节外壳、永磁体阵列一、永磁体阵列二、永磁体阵列三、径向铁芯、径向线圈、端部铁芯、端部线圈、输入轴、关节盖、走线管和轴承一;摆线针轮减速机模块包括曲柄轴、轴承钢套、圆柱销、摆线齿一、摆线齿二、内齿圈、后挡板、圆柱滚子和轴承二。本发明的双定子驱动大扭矩机器人关节,采用电机和减速器径向嵌套的布局方式,同时实现电气连接集成于结构内部,通过圆周、端部双定子,增大驱动力矩和输出力矩,同时可减小力矩波动、拓宽关节转速范围,提高内部空间利用率。
技术研发人员:李伟达,李娟,胡雪峰,黄剑斌
受保护的技术使用者:苏州大学
技术研发日:
技术公布日:2024/3/17
- 还没有人留言评论。精彩留言会获得点赞!