一种分形结构体及分形自适应的抓握双模式夹爪
本发明涉及机械夹爪,尤其涉及一种分形结构体及分形自适应的抓握双模式夹爪。
背景技术:
1、目前的机械手主要应用于农业采摘、生产装配、制造业、物流仓储、汽车工业等领域,机械手夹爪需要适应不同形状和尺寸的物体,并具备辨识、定位和抓取的能力。
2、但是现有的机械手对于不同形状和尺寸的物体适应效果并不好,一般采用吸盘式结构或气囊式结构来实现,但是此类机械手臂的成本高,需要复杂的识别计算系统用于辅助;且其自适应之后对于抓取的物品相对较轻,数量取决于吸附口的设置;更进一步的,而传统的机械夹爪只具有夹持或握持中的一种效果,从而限制了机械夹爪的应用范围,为此,需要改变此现状。
技术实现思路
1、本部分的目的在于概述本发明的实施例的一些方面以及简要介绍一些较佳实施例。在本部分以及本申请的说明书摘要和发明名称中可能会做些简化或省略以避免使本部分、说明书摘要和发明名称的目的模糊,而这种简化或省略不能用于限制本发明的范围。
2、鉴于上述现有机械夹爪存在的问题,提出了本发明。
3、因此,本发明目的是提供一种分形自适应的抓握双模式夹爪,其用于解决现有机械夹爪的自适应结构复杂,成本高,自适应性不好的问题。
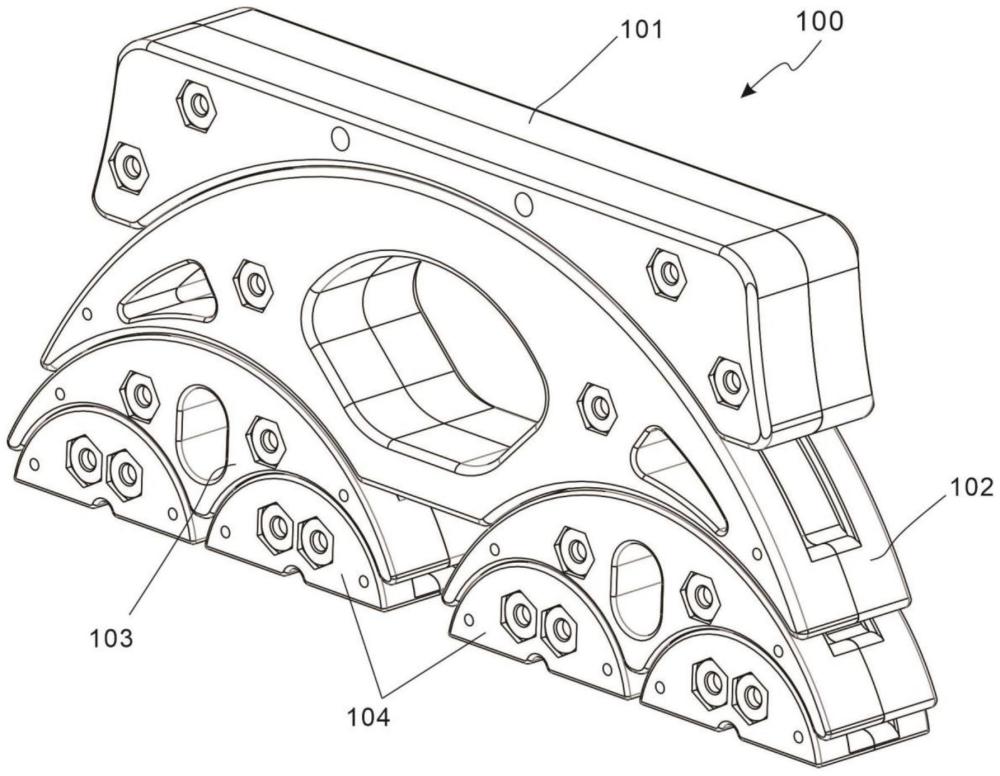
4、为解决上述技术问题,本发明提供如下技术方案:一种分形结构体,此结构体包括,分形单元,其包括顶部分形架、滑动设置于所述顶部分形架一端的一级分形板、滑动设置于所述一级分形板远离顶部分形架一端侧壁上的二级分形板,以及滑动设置于所述二级分形板远离一级分形板一端侧壁上的活动块。
5、作为本发明所述分形结构体的一种优选方案,其中:所述顶部分形架朝向所述一级分形板的一端具有内凹弧面,且于所述内凹弧面的中部设置有形限位块;所述一级分形板的弧形侧壁上开设有第一弧形滑槽,所述形限位块配合滑动于所述第一弧形滑槽内,且所述形限位块的弧度小于所述第一弧形滑槽的弧度。
6、作为本发明所述分形结构体的一种优选方案,其中:所述一级分形板远离所述顶部分形架的一端侧壁上设置有不少于2组的第一弧形凹面,且于所述第一弧形凹面的中部设置有一级形块;所述二级分形板的弧形侧壁上开设有第二弧形滑槽,所述一级形块配合滑动于所述第二弧形滑槽内,所述一级形块的弧度小于所述第二弧形滑槽的弧度;所述二级分形板远离所述一级分形板的一端侧壁上设置有不少于2组的第二弧形凹面,且于所述第二弧形凹面的中部设置有二级形块;所述活动块的弧形侧壁上开设有第三弧形滑槽,所述二级形块配合滑动于所述第三弧形滑槽内,所述二级形块的弧度小于所述第三弧形滑槽的弧度。
7、进一步的,本发明的另一个目的是提供一种分形自适应的抓握双模式夹爪,其用于解决现有机械夹爪自适应结构复杂,成本高,自适应性不好以及结构功能单一的问题。
8、为解决上述技术问题,本发明提供如下技术方案:一种分形自适应的抓握双模式夹爪,此机械夹爪具有上述所述的分形结构体,还包括,固定单元,其包括支撑盘和与之相连的保持架;变换单元,其包括设置于所述支撑盘上的变换驱动件和传动组件,所述变换驱动件驱动所述传动组件转动;驱动单元,其包括设置于所述保持架端部侧壁的位移组件,以及连接于所述位移组件输出端的开合组件。
9、作为本发明所述分形自适应的抓握双模式夹爪的一种优选方案,其中:所述支撑盘的中部开设有通孔,所述保持架的侧壁上沿其轴向对称开设有限位滑槽。
10、作为本发明所述分形自适应的抓握双模式夹爪的一种优选方案,其中:所述传动组件包括设置于所述变换驱动件输出端的主动齿轮、与所述主动齿轮啮合转动的中间从动齿轮,以及与所述中间从动齿轮啮合转动的齿轮转动座。
11、作为本发明所述分形自适应的抓握双模式夹爪的一种优选方案,其中:所述位移组件包括位移驱动件、通过联轴器连接于所述位移驱动件输出端的螺杆、固定于所述螺杆端部的螺杆支撑件、配合螺纹连接于所述螺杆外侧壁上移动螺母、固定于移动螺母端部侧壁的三角连接架,以及安装于所述三角连接架各角部侧壁的转动支撑座;所述位移驱动件通过支架安装于所述保持架的端部侧壁上;所述螺杆支撑件的两端分别滑动于所述限位滑槽内;所述移动螺母配合滑动于所述通孔内。
12、作为本发明所述分形自适应的抓握双模式夹爪的一种优选方案,其中:所述开合组件包括与所述三角连接架角部对应数量的摇杆拨叉和连接于所述摇杆拨叉侧壁上的摆动杆或游杆件;所述摇杆拨叉的一端固定连接于所述顶部分形架的侧壁上,另一端配合铰接于所述支撑盘的侧壁上或齿轮转动座的侧壁上;所述摆动杆和游杆件的一端铰接于所述摇杆拨叉中部侧壁上,另一端铰接于所述转动支撑座上。
13、作为本发明所述分形自适应的抓握双模式夹爪的一种优选方案,其中:所述游杆件包括游动杆和对应连接于所述游动杆两端的游动杆配件,所述游动杆的一端杆体滑动贯穿所述转动支撑座。
14、作为本发明所述分形自适应的抓握双模式夹爪的一种优选方案,其中:所述保持架侧壁上还固定连接有外接法兰盘。
15、本发明的有益效果:
16、本发明中通过采用设计了新型结构的分形结构体,从而通过机械结构之间的配合即可对各种形状的物体进行自适应接触;进一步的,通过在夹爪结构加入变换单元,使得三夹爪结构中的两夹爪可实现自由度的变化,进而从三方向的夹持状态,转变为两方向的握持状态。
技术特征:
1.一种分形结构体,其特征在于:包括,
2.根据权利要求1所述的分形结构体,其特征在于:所述顶部分形架(101)朝向所述一级分形板(102)的一端具有内凹弧面(101a),且于所述内凹弧面(101a)的中部设置有t形限位块(101b);
3.根据权利要求2所述的分形结构体,其特征在于:所述一级分形板(102)远离所述顶部分形架(101)的一端侧壁上设置有不少于2组的第一弧形凹面(102b),且于所述第一弧形凹面(102b)的中部设置有一级t形块(102c);
4.一种分形自适应的抓握双模式夹爪,其特征在于:具有如权利要求1~3任一所述的分形结构体,还包括,
5.根据权利要求4所述的分形自适应的抓握双模式夹爪,其特征在于:所述支撑盘(201)的中部开设有通孔(201a),所述保持架(202)的侧壁上沿其轴向对称开设有限位滑槽(202a)。
6.根据权利要求5所述的分形自适应的抓握双模式夹爪,其特征在于:所述传动组件(302)包括设置于所述变换驱动件(301)输出端的主动齿轮(302a)、与所述主动齿轮(302a)啮合转动的中间从动齿轮(302b),以及与所述中间从动齿轮(302b)啮合转动的齿轮转动座(302c)。
7.根据权利要求6所述的分形自适应的抓握双模式夹爪,其特征在于:所述位移组件(401)包括位移驱动件(401a)、通过联轴器连接于所述位移驱动件(401a)输出端的螺杆(401b)、固定于所述螺杆(401b)端部的螺杆支撑件(401c)、配合螺纹连接于所述螺杆(401b)外侧壁上移动螺母(401d)、固定于移动螺母(401d)端部侧壁的三角连接架(401e),以及安装于所述三角连接架(401e)各角部侧壁的转动支撑座(401f);
8.根据权利要求7所述的分形自适应的抓握双模式夹爪,其特征在于:所述开合组件(402)包括与所述三角连接架(401e)角部对应数量的摇杆拨叉(402a)和连接于所述摇杆拨叉(402a)侧壁上的摆动杆(402b)或游杆件(402c);
9.根据权利要求8所述的分形自适应的抓握双模式夹爪,其特征在于:所述游杆件(402c)包括游动杆(402c-1)和对应连接于所述游动杆(402c-1)两端的游动杆配件(402c-2),所述游动杆(402c-1)的一端杆体滑动贯穿所述转动支撑座(401f)。
10.根据权利要求4~9任一所述的分形自适应的抓握双模式夹爪,其特征在于:所述保持架(202)侧壁上还固定连接有外接法兰盘(202b)。
技术总结
本发明涉及机械夹爪技术领域,公开了一种分形结构体及分形自适应的抓握双模式夹爪,此分形结构体具有分形单元,其包括有顶部分形架、滑动设置于顶部分形架一端的一级分形板、滑动设置于一级分形板远离顶部分形架一端侧壁上的二级分形板,以及滑动设置于二级分形板远离一级分形板一端侧壁上的活动块;此分形夹爪除分形单元外,还包括了固定单元,变换单元和驱动单元等结构单元;本发明中通过采用设计了新型结构的分形结构体,从而通过机械结构之间的配合即可对各种形状的物体进行自适应接触;进一步的,通过在夹爪结构加入变换单元,使得三夹爪结构中的两夹爪可实现自由度的变化,进而从三方向的夹持状态,转变为两方向的握持状态。
技术研发人员:宋智功,黄嘉昕,沈健
受保护的技术使用者:江南大学
技术研发日:
技术公布日:2024/3/27
- 还没有人留言评论。精彩留言会获得点赞!