一种焊接机器人用减震机构的制作方法
本发明涉及机器人加工,具体涉及一种焊接机器人用减震机构。
背景技术:
1、当前在对机器人进行焊接加工时,需要先将机器人工件底盘固定,再将上面的零件放好进行焊接,在焊接时如果产生震动会导致焊点不精确,且机器人上面的工件往往比较长,更加容易产生晃动,为此,现提出一种焊接机器人用减震机构。
技术实现思路
1、本发明的目的在于针对现有技术的缺陷和不足,提出一种焊接机器人用减震机构,能够将工件的底盘进行固定,在焊接时保持下部的稳定,避免工件在焊接时震动;使得上部的工件稳定,避免上部的工件在焊接时震动。
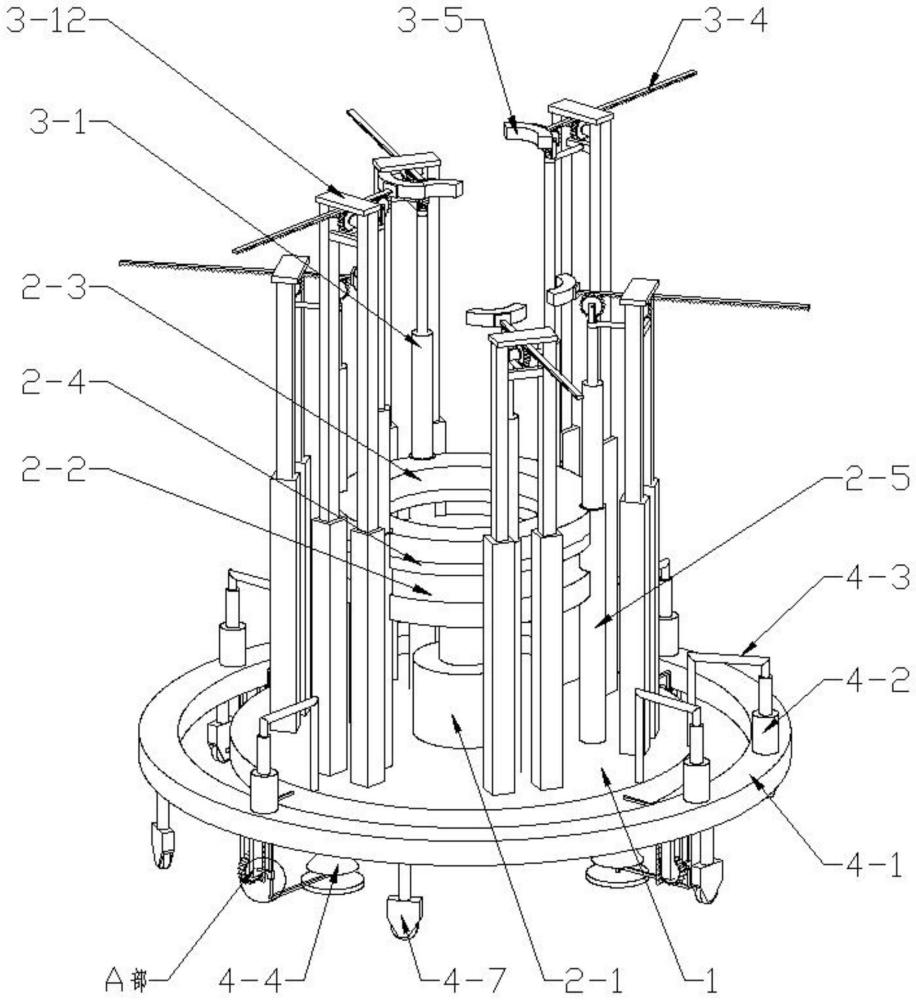
2、为实现上述目的,本发明采用的技术方案是:它包含底座;
3、它还包含:
4、固定机构,所述的固定机构设于底座上;
5、减震机构,所述的减震机构的数量为数个,且分别设于固定机构上;
6、定位机构,所述的定位机构设于底座上;
7、通过上述技术方案设计,利用固定机构将待焊接工件的底盘进行固定,减震机构将工件稳定,避免工件在焊接时震动,定位机构在底座移动后能够将底座与地面保持稳定,避免底座晃动。
8、优选地,所述的固定机构包含:
9、一号液压杆,所述的一号液压杆固定在底座上,一号液压杆与外部电源连接;一号液压杆的活动端固定有压盘;
10、固定环,所述的固定环设于压盘上方;
11、支撑杆,所述的支撑杆的数量为数个,且分别以一号液压杆为圆心;呈环形分布固定在底座上;支撑杆的顶部与固定环嵌设固定,支撑杆的环壁活动嵌设在压盘的环壁上;
12、通过上述技术方案设计,将待焊接工件的底盘放置在压盘上,启动一号液压杆上升,使得压盘上升,待焊接工件的底盘被压在固定环和压环之间。
13、优选地,固定环的底部固定有橡胶圈
14、通过上述技术方案设计,橡胶圈避免工件被压坏。
15、优选地,减震机构与支撑杆一一对应设置,所述的减震机构均包含:
16、电动伸缩杆,所述的电动伸缩杆固定在支撑杆上,电动伸缩杆与外部电源连接;电动伸缩杆的活动端固定有安装块;
17、一号齿轮,所述的一号齿轮设于安装块上方,一号齿轮的两侧壁均通过轴和轴承旋接有一号安装板,一号安装板固定在安装块上;一号齿轮上啮合设有一号齿条;
18、橡胶弧垫,所述的橡胶弧垫设于一号齿条的内端,橡胶弧垫的外侧壁上固定有二号安装板,二号安装板与一号齿条的内端固定;
19、二号齿轮,所述的二号齿轮设于一号齿轮外侧,二号齿轮啮合设于一号齿条下方,二号齿轮的一侧设有电机,电机与外部电源连接;
20、插板,所述的插板的数量为两个,且分别设于二号齿轮的两侧,电机固定在一侧的插板上,电机的输出轴上连接有连接轴,连接轴穿设固定在二号齿轮上,连接轴的另一端通过轴承旋接在另一侧插板上;两个插板的底部活动插设在插管内,插管固定在底座上;两个插板上端之间连接板;
21、一号固定杆,所述的一号固定杆固定在两个插板之间,一号固定杆的内侧壁上固定有一号连接杆,一号连接杆的另一端与安装块固定;
22、通过上述技术方案设计,将待焊接工件的底盘固定好后,启动各个电动伸缩杆,使得安装块上下移动,带动一号齿轮和一号连接杆上下移动,使得一号齿条上下移动,插板在插管内移动,使得各个橡胶弧垫上下移动;启动各个电机,使得二号齿轮转动,带动一号齿条内外移动,使得橡胶弧垫内外移动,各个橡胶弧垫能够抵设在工件的各个位置,使得工件稳定,避免工件在焊接时震动。
23、优选地,所述的定位机构包含:
24、外环,所述的外环套设在底座上;外环的底部呈环形分布有数个万向轮;
25、二号液压杆,所述的二号液压杆的数量为数个,且分别固定在外环上,二号液压杆与外部电源连接;二号液压杆的活动端固定有二号连接杆,二号连接杆的另一端与底座固定;
26、吸盘,所述的吸盘的数量为数个,且分别呈环形分布设于底座的底部,吸盘的上端固定有三号连接杆,三号连接杆的上端与底座的下表面固定;
27、清洁机构,所述的清洁机构设于外环的底部,清洁机构与吸盘一一对应设置;
28、通过上述技术方案设计,利用外环底部的万向轮移动底座到合适的位置,利用清洁机构清理吸盘的下方,启动二号液压杆将吸盘下降压在地面,使得底座稳定在地面上,避免焊接时底座偏移。
29、优选地,所述的清洁机构均包含:
30、二号齿条,所述的二号齿条设于底座外侧,齿轮的上端通过四号连接杆与底座固定;二号齿条的外侧啮合设有三号齿轮,三号齿轮内插设固定有一号转轴,三号齿轮的两侧壁上设有三号安装板,三号安装板的上端与外环底部固定;连接轴的一端与一侧的三号安装板通过轴承旋接,连接轴的另一端通过轴承旋接穿过另一侧的三号安装板后,与转向器连接;转向器的上端通过二号固定杆与外环的底部固定;
31、二号转轴,所述的二号转轴与转向器的下连接段连接,二号转轴的底部固定有五号连接杆,五号连接杆为“l”形结构;
32、海绵擦,所述的海绵擦设于五号连接杆的底部;
33、通过上述技术方案设计,当底座下移时,二号齿条下移带动三号齿轮转动,使得一号转轴转动,带动转向器转动,使得二号转轴转动,带动五号连接杆以及海绵擦在地面转动,使得吸盘下方的部分被海绵擦擦拭干净,便于吸盘进行吸附,当吸盘下降时,海绵擦处于外环的外侧。
34、优选地,海绵擦通过魔术贴与五号连接杆底部固定;
35、通过上述技术方案设计,魔术贴便于对海绵擦进行换洗。
36、优选地,海绵擦为圆形结构,海绵擦的直径大于吸盘的直径设置;
37、通过上述技术方案设计,海绵擦能够全面清理吸盘的底部。
38、本发明的工作原理:
39、与现有技术相比,本发明的有益效果是:
40、1、设有固定机构和定位机构,能够将工件的底盘进行固定,在焊接时保持下部的稳定,避免工件在焊接时震动;
41、2、设有减震机构,各个橡胶弧垫能够抵设在工件的各个位置,使得工件稳定,避免工件在焊接时震动。
技术特征:
1.一种焊接机器人用减震机构(3),它包含底座(1);
2.根据权利要求1所述的一种焊接机器人用减震机构,其特征在于:所述的固定机构(2)包含:
3.根据权利要求2所述的一种焊接机器人用减震机构,其特征在于:固定环(2-3)的底部固定有橡胶圈(2-4)。
4.根据权利要求2所述的一种焊接机器人用减震机构,其特征在于:减震机构(3)与支撑杆(2-5)一一对应设置,所述的减震机构(3)均包含:
5.根据权利要求1所述的一种焊接机器人用减震机构,其特征在于:所述的定位机构(4)包含:
6.根据权利要求5所述的一种焊接机器人用减震机构,其特征在于:所述的清洁机构(4-6)均包含:
7.根据权利要求6所述的一种焊接机器人用减震机构,其特征在于:海绵擦(4-6-9)通过魔术贴与五号连接杆(4-6-8)底部固定。
8.根据权利要求6所述的一种焊接机器人用减震机构,其特征在于:海绵擦(4-6-9)为圆形结构,海绵擦(4-6-9)的直径大于吸盘(4-4)的直径设置。
技术总结
一种焊接机器人用减震机构,本发明涉及机器人加工技术领域,固定机构设于底座上;减震机构分别设于固定机构上;定位机构设于底座上;能够将工件的底盘进行固定,在焊接时保持下部的稳定,避免工件在焊接时震动;使得上部的工件稳定,避免上部的工件在焊接时震动。
技术研发人员:谢马福,陈莉
受保护的技术使用者:江苏拓邦机器人有限公司
技术研发日:
技术公布日:2024/3/31
- 还没有人留言评论。精彩留言会获得点赞!