一种放射性贮罐及热室内部管道拆除机器人的制作方法
本发明涉及一种拆除机器人,具体地说,是涉及一种放射性贮罐及热室内部管道拆除机器人。
背景技术:
1、放射性贮罐及热室退役拆除时,内部的冷却蛇管、废液进料管道、排空管道及其它放射性管道均需完成切割拆除,鉴于贮罐、热室内部均会残留一定量的残留放射性物质,具有较高的剂量率,贮罐及热室空间较为狭小,且部分管道位于贮罐及热室距离地面较高处,人员难以接近。因此,在退役拆除过程中,需要对使用远程化、智能化设备进行管道拆除。
2、现有技术中,常采用人工拆除或大型破拆机器人对放射性管道进行拆除。人工拆除时,人员近距离接触放射性物质,对人体健康的影响极其巨大,可能造成胎儿畸形,人体病变,以及癌症等问题。大型破拆机器人如brook机器人等,体积大、重量重、可达性受限等问题,加之部分放射性贮罐、热室退役时已超过设计寿期,结构强度有所下降;设计时大部分未考虑大型设备进入的通道;内部管道复杂,布置位置较高;空间剂量率水平高等特点,常规的破拆机器人的可达性、通过性及安全性无法保证,难以安全有效的拆除管道,并保证设施安全,无法达到放射性贮罐及热室内部管道完全拆除的目的。
技术实现思路
1、本发明的目的在于提供一种放射性贮罐及热室内部管道拆除机器人,主要解决常规机器人难以安全有效的拆除管道的问题。
2、为实现上述目的,本发明采用的技术方案如下:
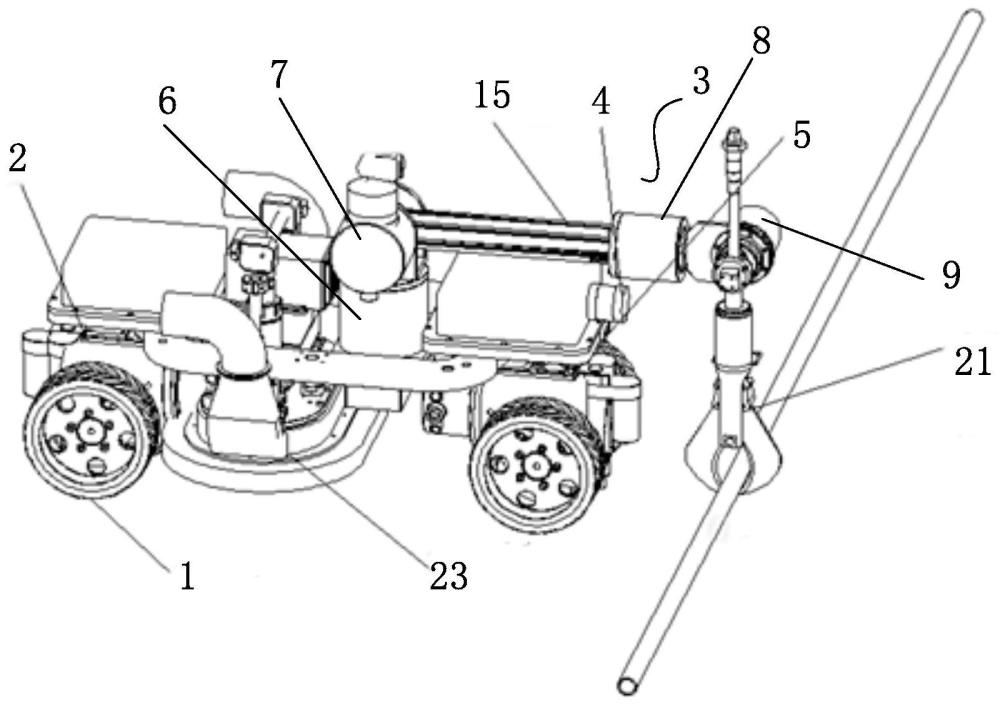
3、一种放射性贮罐及热室内部管道拆除机器人,包括行走小车,设置于行走小车后部的永磁体,设置于行走小车腹部的吸附装置,固定于行走小车上的拆除机械手,以及设置于行走小车前部的激光雷达和双目视觉系统;所述拆除机械手由a轴组件、b轴组件、c轴组件和用于载带拆除工装的d轴组件组成;所述a轴组件通过底板固定于行走小车的圈梁上;所述b轴组件竖直的固定在a轴组件上,所述a轴组件带动b轴组件左水平往复旋转动作;所述c轴组件水平的固定在b轴组件上,所述b轴组件带动c轴组件做往复旋转摆动;所述d轴组件水平的固定在c轴组件上,所述c轴组件可带动d轴组件做往复旋转动作;所述d轴组件用于搭载工具头做往复旋转动作。
4、进一步地,在本发明中,所述a轴组件包括用于与行走小车的圈梁固定的a轴底板,设置于a轴底板上的a轴密封外壳体,以及设置于a轴密封外壳体内的a轴伺服电机、a轴减速机、a轴转动输出端;其中,所述a轴底板、a轴伺服电机、a轴减速机、a轴转动输出端依次连接,组成a轴组件的动作执行部件。
5、进一步地,在本发明中,所述b轴组件包括固定于a轴转动输出端上的支架,固定于支架上的b轴密封外壳体,设置于b轴密封外壳体内的b轴伺服电机、b轴减速机,以及与b轴减速机相连的摆动臂。
6、进一步地,在本发明中,所述c轴组件包括与摆动臂的另一端的c轴底板,与c轴底板固定的c轴密封外壳体,以及设置于c轴密封外壳体内的c轴伺服电机、c轴减速机、c轴转动输出端;其中,所述c轴底板、c轴伺服电机、c轴减速机、c轴转动输出端依次连接,组成c轴组件的动作执行部件。
7、进一步地,在本发明中,所述d轴组件包括与c轴转动输出端相连的d轴密封外壳体,设置于d轴密封外壳体内的d轴伺服电机、d轴减速机、d轴转动输出端,以及与d轴转动输出端相连的工具头。
8、进一步地,在本发明中,所述b轴密封外壳体上还固定设置有云台摄像系统。
9、进一步地,在本发明中,所述行走小车通过伺服电机驱动。
10、进一步地,在本发明中,所述吸附装置采用负压吸附,包括设置于行走小车的腹部的负压吸盘,以及设置于行走小车后端通过管道与负压吸盘相连的真空泵。
11、与现有技术相比,本发明具有以下有益效果:
12、(1)本发明通过行走小车带动拆除机械手在放射性贮罐或热室内移动,能够通过尺寸较小的设备安装孔、热室屏蔽门等通道进入拆除设施内部,不破坏设施原有结构。机器人在磁力与负压的帮助下稳定吸附于设施内部壁面上。对于位置较高的管线,机器人可在卷扬机辅助牵引下,通过伺服电机驱动,自动从底板攀爬至90°壁面及天花板上,并利用磁力及负压吸附。机器人到达指定位置后利用机身上的机械手可搭载多种拆除设备,如等离子切割、液压钳、圆盘锯及高压水刀等进行拆除作业,拆除完成后利用机械手可对拆除废物进行收集装桶,满足贮罐及热室内部全方位的管道拆除要求。
13、(2)本发明通过在拆除机械手臂上搭载360度云台摄像系统,可以实时观察机器人周围环境,为机器人作业提供辅助。机械手末端搭载的摄像头,可以辅助观察工具头实时工作时的状态,可以为机械手动作提供准确的视觉服务。
14、(3)本发明通过在行走小车腹部设计有一个负压吸盘,通过管道连接至后端真空设备,在不锈钢壁面或其他磁性较弱,负载较大作业场所,可通过抽真空的方式使机器人紧紧吸附于壁面上。
技术特征:
1.一种放射性贮罐及热室内部管道拆除机器人,其特征在于,包括行走小车(1),设置于行走小车(1)后部的永磁体(2),设置于行走小车(1)腹部的吸附装置,固定于行走小车(1)上的拆除机械手(3),以及设置于行走小车(1)前部的激光雷达(4)和双目视觉系统(5);所述拆除机械手(3)由a轴组件(6)、b轴组件(7)、c轴组件(8)和用于载带拆除工装的d轴组件(9)组成;所述a轴组件(6)通过底板固定于行走小车(1)的圈梁上;所述b轴组件(7)竖直的固定在a轴组件(6)上,所述a轴组件(6)带动b轴组件(7)左水平往复旋转动作;所述c轴组件(8)水平的固定在b轴组件(7)上,所述b轴组件(7)带动c轴组件(8)做往复旋转摆动;所述d轴组件(9)水平的固定在c轴组件(8)上,所述c轴组件(8)可带动d轴组件(9)做往复旋转动作;所述d轴组件(9)用于搭载工具头做往复旋转动作。
2.根据权利要求1所述的一种放射性贮罐及热室内部管道拆除机器人,其特征在于,所述a轴组件(6)包括用于与行走小车(1)的圈梁固定的a轴底板(10),设置于a轴底板(10)上的a轴密封外壳体(11),以及设置于a轴密封外壳体(11)内的a轴伺服电机、a轴减速机、a轴转动输出端(12);其中,所述a轴底板(10)、a轴伺服电机、a轴减速机、a轴转动输出端(12)依次连接,组成a轴组件的动作执行部件。
3.根据权利要求2所述的一种放射性贮罐及热室内部管道拆除机器人,其特征在于,所述b轴组件(7)包括固定于a轴转动输出端(12)上的支架(13),固定于支架(13)上的b轴密封外壳体(14),设置于b轴密封外壳体(14)内的b轴伺服电机、b轴减速机,以及与b轴减速机相连的摆动臂(15)。
4.根据权利要求3所述的一种放射性贮罐及热室内部管道拆除机器人,其特征在于,所述c轴组件(8)包括与摆动臂(15)的另一端的c轴底板(16),与c轴底板(16)固定的c轴密封外壳体(17),以及设置于c轴密封外壳体(17)内的c轴伺服电机、c轴减速机、c轴转动输出端(18);其中,所述c轴底板(16)、c轴伺服电机、c轴减速机、c轴转动输出端(18)依次连接,组成c轴组件的动作执行部件。
5.根据权利要求4所述的一种放射性贮罐及热室内部管道拆除机器人,其特征在于,所述d轴组件(9)包括与c轴转动输出端(18)相连的d轴密封外壳体(19),设置于d轴密封外壳体(19)内的d轴伺服电机、d轴减速机、d轴转动输出端(20),以及与d轴转动输出端相连的工具头(21)。
6.根据权利要求5所述的一种放射性贮罐及热室内部管道拆除机器人,其特征在于,所述b轴密封外壳体(14)上还固定设置有云台摄像系统(22)。
7.根据权利要求1所述的一种放射性贮罐及热室内部管道拆除机器人,其特征在于,所述行走小车(1)通过伺服电机驱动。
8.根据权利要求1所述的一种放射性贮罐及热室内部管道拆除机器人,其特征在于,所述吸附装置采用负压吸附,包括设置于行走小车(1)的腹部的负压吸盘(23),以及设置于行走小车(1)后端通过管道与负压吸盘(23)相连的真空泵。
技术总结
本发明公开了一种放射性贮罐及热室内部管道拆除机器人,主要解决常规机器人难以安全有效的拆除管道的问题。该拆除机器人包括行走小车,设置于行走小车后部的永磁体,设置于行走小车腹部的吸附装置,固定于行走小车上的拆除机械手,以及设置于行走小车前部的激光雷达和双目视觉系统。通过上述设计,本发明的机器人到达指定位置后利用机身上的机械手可搭载多种拆除设备,如等离子切割、液压钳、圆盘锯及高压水刀等进行拆除作业,拆除完成后利用机械手可对拆除废物进行收集装桶,满足贮罐及热室内部全方位的管道拆除要求。
技术研发人员:李飞,安田鑫,王涛,王刚,樊洁,母坤霖,方翔,雷婷,杨洪生,杨超,张黔荣
受保护的技术使用者:中核四川环保工程有限责任公司
技术研发日:
技术公布日:2024/2/21
- 还没有人留言评论。精彩留言会获得点赞!