人形机器人及人形机器人控制方法与流程
本申请属于人形机器人设备,更具体地说,是涉及一种人形机器人及人形机器人控制方法。
背景技术:
1、人形机器人是一种模仿人类外形和动作的机器人,通常由头部、躯干、四肢等部分组成,能够执行一些复杂的任务,如抓取、搬运、交互等。人形机器人的电源问题是一个重要的挑战,因为人形机器人需要消耗大量的电能来驱动各个部件,而传统的电池容量有限,需要经常充电,影响了人形机器人的连续工作能力。人形机器人的握持功能是一种能够模仿人类手部动作的功能,通常由多个机械臂、灵巧手和传感器等组成,能够根据不同的任务和目标,调节机械手的姿态和力度,以实现精确和灵活的抓取和操作。
2、目前市面上已有的机器人的充电机制大多采用以下两种方式之一:
3、一种是使用机械技术和电子技术设计的机器人,这种机器人没有形态上的“脚”和“手”,无法通过wifi遥感技术实现移动或“手”操作的一些细节操作,只能在固定的位置或范围内工作。这种机器人即便使用太阳能充电,也需要运维人员将机器人手动搬至有太阳的地方,而且机器人表面均是太阳能电池板,运维人员接触后,易诱发触电事故发生。这种充电机制的缺点是操作难度大,灵活性极差,安全性低,充电效率低。
4、另一种是使用充电桩装置的机器人,这种机器人需要运维人员人工给对应的机器人定时定期的进行充电,或者机器人自动寻找充电桩进行充电。这种充电机制的缺点是充电装置体积过大,不易携带,充电的范围也比较少,有一定的局限性,使用的效果不是很理想,充电时间长,充电成本高。
技术实现思路
1、本申请实施例的目的在于提供一种人形机器人及人形机器人控制方法,旨在解决现有技术中的人形机器人充电效率低的技术问题。
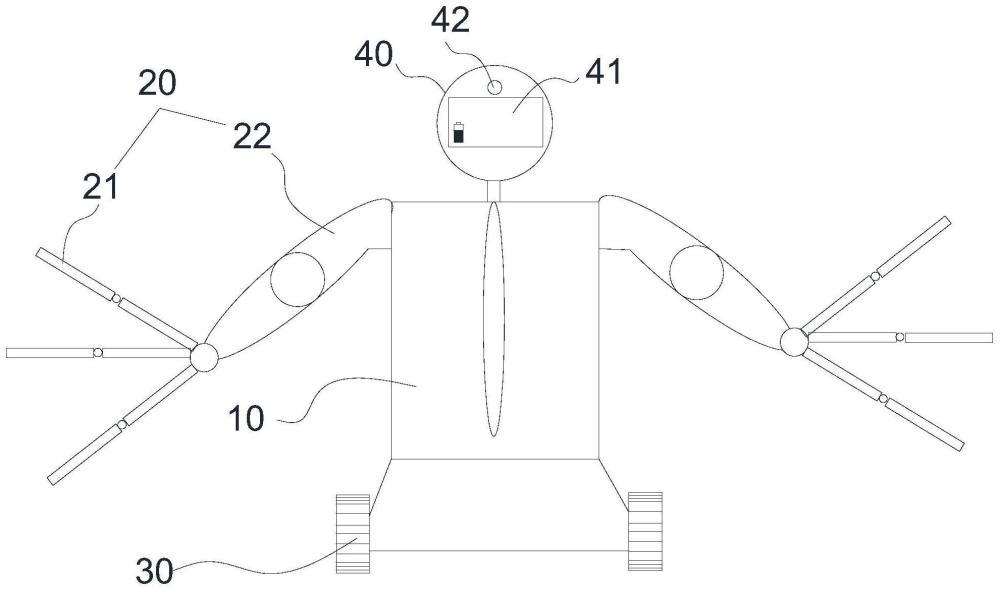
2、为实现上述目的,根据本申请的一个方面,提供了一种人形机器人,人形机器人包括:主体,主体内部设置有蓄电部;机械手,机械手安装在主体上,机械手包括握持部,握持部上覆盖安装有太阳能充电部,太阳能充电部与蓄电部电连接,握持部具有展开位置及握持位置;控制部,控制部安装在主体上,并与蓄电部及机械手电连接,控制部用于控制握持部从握持位置切换至展开位置,以增大太阳能接收面积。
3、优选地,人形机器人还包括移动部,移动部设置在主体的底部,移动部与控制部电连接,在人形机器人需要充电的情况下,控制部用于控制移动部移动至阳光直射区域。
4、优选地,主体、机械手的表面均覆盖安装有太阳能充电部。
5、优选地,人形机器人还包括无线传输部,无线传输部与控制部电连接,用于与外部服务器交互数据。
6、优选地,主体包括头部,人形机器人还包括显示部,显示部设置在头部上,显示部与控制部电连接,显示部能够显示蓄电部的剩余电量及充电电流。
7、优选地,机械手还包括机械臂,机械臂安装在主体上,握持部安装在机械臂的端部,机械臂与控制部的电连接。
8、优选地,人形机器人还包括摄像部,摄像部安装在头部,并与控制部电连接。
9、优选地,移动部包括多个驱动轮,多个驱动轮均与控制部电连接。
10、优选地,人形机器人还包括太阳能伞部,太阳能伞部设置在头部上,太阳能伞部包括表面覆盖有可折叠太阳能板的伞面,可折叠太阳能板与蓄电部电连接,伞面具有张开的第一位置及收缩的第二位置,太阳能伞部与控制部电连接,控制部能够控制太阳能伞部在第一位置和第二位置之间切换。
11、优选地,太阳能伞部包括:伞柱,伞柱设置在头部;伞面驱动机构,伞面驱动机构安装在伞柱上,并与控制部电连接,用于控制伞面在第一位置和第二位置之间切换。
12、根据本发明的另一个方面,提供了一种人形机器人控制方法,该方法包括:响应于检测到人形机器人的电池电量值低于第一电量阈值,控制人形机器人向目标位置移动;响应于检测到人形机器人到达目标位置,则控制人形机器人的目标部位上覆盖安装的太阳能充电部执行太阳能采集动作,以将采集到的太阳能转化为电能存储到人形机器人的蓄电部,其中,目标位置为太阳能充电部能够采集到太阳能的位置;响应于电池电量值达到第二电量阈值,则控制太阳能充电部结束执行太阳能采集动作。
13、本申请提供的人形机器人的有益效果在于:与现有技术相比,本申请所提供的人形机器人通过在机器人的主体内部设置蓄电部,使得机器人能够使用电能进行各种操作,提高了机器人的灵活性和适应性;同时,蓄电部也为机器人提供了自主运动的能力,使得机器人能够根据需要移动到不同的位置,增加了机器人的移动性和便利性;通过在机器人的机械手上设置太阳能充电部,使得机器人能够利用太阳能为蓄电部充电,增加了机器人的续航能力和环保性;同时,太阳能充电部也为机器人提供了一种可再生的能源,使得机器人能够在没有外部电源的情况下继续工作,增加了机器人的可靠性和安全性;通过在机器人的控制部上设置控制握持部的切换功能,使得机器人能够根据不同的情况调整太阳能充电部的面积,优化了机器人的充电效果和能耗比;同时,该功能也使得机器人的握持部具有了双重的作用,既可以实现人形机器人的握持功能,又可以通过展开握持部增大接收太阳能的面积,更好地为蓄电池充电,提高了机器人的功能性和效率。
技术特征:
1.一种人形机器人,其特征在于,所述人形机器人包括:
2.根据权利要求1所述的人形机器人,其特征在于,所述人形机器人还包括移动部,所述移动部设置在所述主体的底部,所述移动部与所述控制部电连接,在所述人形机器人需要充电的情况下,所述控制部用于控制所述移动部移动至阳光直射区域。
3.根据权利要求2所述的人形机器人,其特征在于,所述主体、所述机械手的表面均覆盖安装有太阳能充电部。
4.根据权利要求2所述的人形机器人,其特征在于,所述人形机器人还包括无线传输部,所述无线传输部与所述控制部电连接,用于与外部服务器交互数据。
5.根据权利要求2所述的人形机器人,其特征在于,所述主体包括头部,所述人形机器人还包括显示部,所述显示部设置在所述头部上,所述显示部与所述控制部电连接,所述显示部能够显示所述蓄电部的剩余电量及充电电流。
6.根据权利要求1所述的人形机器人,其特征在于,所述机械手还包括机械臂,所述机械臂安装在所述主体上,所述握持部安装在所述机械臂的端部,所述机械臂与所述控制部的电连接。
7.根据权利要求5所述的人形机器人,其特征在于,所述人形机器人还包括摄像部,所述摄像部安装在所述头部,并与所述控制部电连接。
8.根据权利要求2所述的人形机器人,其特征在于,所述移动部包括多个驱动轮,多个所述驱动轮均与所述控制部电连接。
9.根据权利要求5所述的人形机器人,其特征在于,所述人形机器人还包括太阳能伞部,所述太阳能伞部设置在所述头部上,所述太阳能伞部包括表面覆盖有可折叠太阳能板的伞面,所述可折叠太阳能板与所述蓄电部电连接,所述伞面具有张开的第一位置及收缩的第二位置,所述太阳能伞部与所述控制部电连接,所述控制部能够控制所述太阳能伞部在所述第一位置和所述第二位置之间切换。
10.一种人形机器人的控制方法,其特征在于,所述方法包括:
技术总结
本申请适用于照明设备技术领域,提供了一种人形机器人及人形机器人控制方法,人形机器人包括:主体,主体内部设置有蓄电部;机械手,机械手安装在主体上,机械手包括握持部,握持部上覆盖安装有太阳能充电部,太阳能充电部与蓄电部电连接,握持部具有展开位置及握持位置;控制部,控制部安装在主体上,并与蓄电部及机械手电连接,控制部用于控制握持部从握持位置切换至展开位置,以增大太阳能接收面积。
技术研发人员:舒灿,何围
受保护的技术使用者:深圳市优必选科技股份有限公司
技术研发日:
技术公布日:2024/3/24
- 还没有人留言评论。精彩留言会获得点赞!