一种低压电机驱动智能浮动装置的制作方法
一种低压电机驱动智能浮动装置,主要用作机器人末端执行器和柔性加工调整工具,也可以作为动态力输出装置。该装置的输出法兰可以连接打磨机等加工工具,带动加工工具对工件进行加工。
背景技术:
1、智能浮动装置是一种由力传感器、位置传感器和执行元件组合而成的机械臂末端执行工具,运行过程中,通过力传感器测量工具和工件之间的接触力,控制器通过力控算法调整输出力的大小,控制驱动部件实时调整工具和工件之间的接触力。
2、目前,智能浮动装置主要作为末端执行工具,安装在机械臂末端,执行抛光打磨的工作,例如,汽车车身焊缝打磨、洁具封釉的抛光和曲面打磨等。也可以安装在数控机床上,连接刀座,作为刀具附件。
3、市场上主流的智能浮动装置为气驱动,优点是能源获取方便、清洁,缺点是元器件多,连接环节多,相对可靠性差,不便实现现场总线控制。
技术实现思路
1、本发明的技术解决问题是:克服现有设备结构复杂,可靠性差、动态响应能力较差和不适合现场总线控制的缺点。本发明将控制器、驱动器和电源等设备集成在控制盒中,可以和装置做成一体,集成度更高。
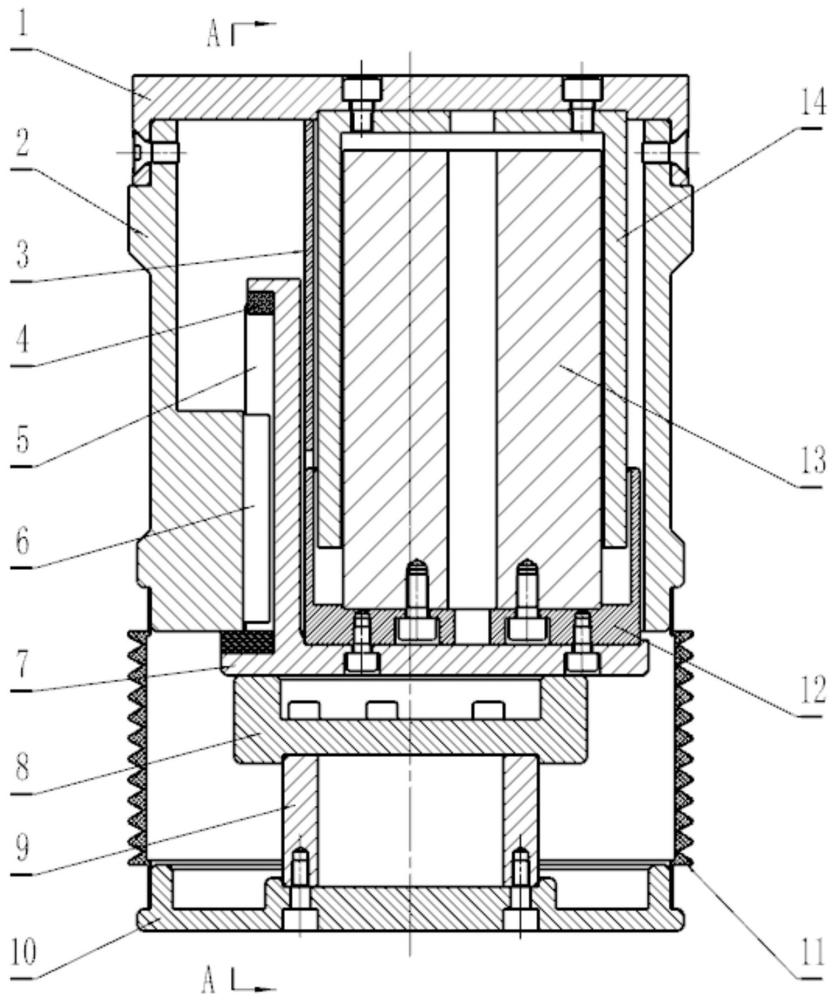
2、本发明的技术解决方案是:一种低压电机驱动智能浮动装置,包括底座、外壳、电磁隔板、直线导轨、滑块、动子转接板、传感器底座、六维力传感器、输出法兰、电机隔离罩、音圈电机、磁栅尺、磁栅尺读数头;
3、外壳与底座固连后形成一个半封闭腔体,用于提供动力的音圈电机由电机动子和电机定子组成,电子定子固定安装在所述半封闭腔体内并与所述底座固定连接,电子动子通过电机隔离罩与动子转接板固连,所述的动子转接板上安装直线导轨以及磁栅尺,滑块和磁栅尺读数头安装在所述外壳上,与所述直线导轨组成的直线导轨副起到导向和承载的作用;动子转接板下方通过传感器底座安装六维力传感器,传感器安装面上安装输出法兰;所述电磁隔板安装在外壳上,用于隔离电机定子的磁场,避免磁场影响磁栅尺和六维力传感器的信号。
4、优选的,本发明装置还包括防尘罩,所述防尘罩使用卡箍紧固在输出法兰和外壳的安装面上。
5、优选的,所述电机隔离罩安装在电机动子下端,电机动子运动到最大行程位置时,电机隔离罩仍然可以完全罩住电机动子上的线圈。
6、优选的,电机隔离罩的内径大于电机定子的外径,两者之前的间隙为0.5-1.5mm。
7、优选的,所述的动子转接板主体为l型结构,l型横边的外表面为传感器底座的安装面,内表面设置圆形凹槽,用于实现电机隔离罩的定位,l型竖边外侧向内设置方形凹槽,方形凹槽的底面作为最小极限位置限位块安装面,用于安装最小极限位置限位块,所述方形凹槽通过竖直挡板分成两部分,一部分内部设置导轨安装槽,导轨安装槽的顶部设置最大极限位置限位块安装面,用于安装最大极限位置限位块,另一部分的竖直挡板作为磁栅尺安装面,用于安装磁栅尺。
8、优选的,所述的导轨安装槽的高度满足电机动子运动到最大行程位置时,导轨安装槽所在端面和电磁隔板之间仍然有重叠部分,使电机定子的磁场对信号线的干扰降到最低。
9、优选的,动子转接板和电磁隔板材质均为不锈钢。
10、优选的,所述外壳内壁一侧设置滑块安装槽、磁栅尺安装面以及电磁隔板安装槽,滑块的安装面和滑块安装槽的侧面配合并固定连接,电磁隔板插入所述电磁隔板安装槽中,直至和底座接触,磁栅尺读数头安装在磁栅尺安装面上并紧固。
11、本发明应用于机器人末端执行器、柔性加工调整工具、动态力输出装置。
12、一种利用所述的一种低压电机驱动智能浮动装置实现的加工控制方法,包括:
13、输出法兰上安装加工工具,携带加工工具的输出法兰远离工件时,使用位置控制模式,磁栅尺读数头在磁栅尺上读取位置数据,实现闭环控制使得加工工具和工件靠近;
14、加工工具接触到工件的瞬间,六维力传感器感知到接触力,切换到力控制模式,根据六维力传感器感知的力和力矩的数值,实时调整电机的输出力,使得在不同的加工面上,加工工具和工件之间维持需要的力值。
15、当进行曲面加工时,该浮动装置和加工工具的姿态不断发生变化,六维力传感器感知的力和力矩的值在不断变化,将六维力传感器的六个输出值经过坐标变换,解算出该浮动装置和加工工具的姿态,同时保证加工工具均匀施加加工压力,提高表面加工质量。
16、一种低压电机驱动智能浮动装置的协同控制系统,其特征在于:包括多个所述的一种低压电机驱动智能浮动装置,通过现场总线实现每个低压电机驱动智能浮动装置的控制,完成多个设备协作运行。
17、本发明与现有技术相比的有益效果是:
18、(1)本发明设计了一种低压电驱动智能浮动装置,可以采用48v低压电机驱动,相比气缸驱动的设备,减少了气管接头、伺服阀、消音器等设备,简化了设备的结构;
19、(2)本发明设计的一种低压电驱动智能浮动装置,采用48v低压电机驱动,相比气动元件驱动,本发明的动态响应能力更高;
20、(3)本发明设计的一种低压电驱动智能浮动装置,动力和检测元件均采用电气设备,有利于设备的集成,适合现场总线控制,智能化程度更高;
21、(4)本发明设计的一种低压电驱动智能浮动装置,整套设备连接部分均为螺钉连接,外置控制盒通过一根电缆与装置连接,装置的可靠性和集成度更高。
技术特征:
1.一种低压电机驱动智能浮动装置,其特征在于:包括底座、外壳、电磁隔板、直线导轨、滑块、动子转接板、传感器底座、六维力传感器、输出法兰、电机隔离罩、音圈电机、磁栅尺、磁栅尺读数头;
2.如权利要求1所述的一种低压电机驱动智能浮动装置,其特征在于,还包括防尘罩,所述防尘罩使用卡箍紧固在输出法兰和外壳的安装面上。
3.如权利要求1所述的一种低压电机驱动智能浮动装置,其特征在于,所述电机隔离罩安装在电机动子下端,电机动子运动到最大行程位置时,电机隔离罩仍然可以完全罩住电机动子上的线圈。
4.如权利要求3所述的一种低压电机驱动智能浮动装置,其特征在于,电机隔离罩的内径大于电机定子的外径,两者之前的间隙为0.5-1.5mm。
5.如权利要求1所述的一种低压电机驱动智能浮动装置,其特征在于,所述的动子转接板主体为l型结构,l型横边的外表面为传感器底座的安装面,内表面设置圆形凹槽,用于实现电机隔离罩的定位,l型竖边外侧向内设置方形凹槽,方形凹槽的底面作为最小极限位置限位块安装面,用于安装最小极限位置限位块,所述方形凹槽通过竖直挡板分成两部分,一部分内部设置导轨安装槽,导轨安装槽的顶部设置最大极限位置限位块安装面,用于安装最大极限位置限位块,另一部分的竖直挡板作为磁栅尺安装面,用于安装磁栅尺。
6.如权利要求1所述的一种低压电机驱动智能浮动装置,其特征在于,所述的导轨安装槽的高度满足电机动子运动到最大行程位置时,导轨安装槽所在端面和电磁隔板之间仍然有重叠部分,使电机定子的磁场对信号线的干扰降到最低。
7.如权利要求1所述的一种低压电机驱动智能浮动装置,其特征在于,动子转接板和电磁隔板材质均为不锈钢。
8.如权利要求1所述的一种低压电机驱动智能浮动装置,其特征在于,所述外壳内壁一侧设置滑块安装槽、磁栅尺安装面以及电磁隔板安装槽,滑块的安装面和滑块安装槽的侧面配合并固定连接,电磁隔板插入所述电磁隔板安装槽中,直至和底座接触,磁栅尺读数头安装在磁栅尺安装面上并紧固。
9.如权利要求1所述的一种低压电机驱动智能浮动装置,其特征在于,应用于机器人末端执行器、柔性加工调整工具、动态力输出装置。
10.一种利用权利要求1-8之一所述的一种低压电机驱动智能浮动装置实现的加工控制方法,其特征在于:
11.根据权利要求10所述的方法,其特征在于:当进行曲面加工时,该浮动装置和加工工具的姿态不断发生变化,六维力传感器感知的力和力矩的值在不断变化,将六维力传感器的六个输出值经过坐标变换,解算出该浮动装置和加工工具的姿态,同时保证加工工具均匀施加加工压力,提高表面加工质量。
12.一种低压电机驱动智能浮动装置的协同控制系统,其特征在于:包括多个权利要求1-8之一所述的一种低压电机驱动智能浮动装置,通过现场总线实现每个低压电机驱动智能浮动装置的控制,完成多个设备协作运行。
技术总结
一种低压电机驱动智能浮动装置,可以作为机器人末端执行器,也可以单独安装在机床上作为辅助工具。主要应用于机械零件的抛光打磨和动态响应要求比较高的力发生装置。一种低压电驱动智能浮动装置包含:底座、外壳、电磁隔板、最大极限位置限位块、直线导轨、滑块、动子转接板、传感器底座、六维力传感器、输出法兰、防尘罩、电机隔离罩、电机动子、电机定子、磁栅尺、磁栅尺读数头、最小极限位置限位块。该装置使用音圈电机作为动力源,直线导轨副导向,磁栅尺作为位置反馈元件,六维力传感器作为力反馈元件。该装置运用力位混合控制方法、在输出法兰浮动的工况下能够输出恒定的力。根据六维力传感器感知的力值,可以解算出装置的姿态。
技术研发人员:赵金海,朱孟龙,李娜,张亚举
受保护的技术使用者:中国航天空气动力技术研究院
技术研发日:
技术公布日:2024/3/31
- 还没有人留言评论。精彩留言会获得点赞!