一种基于非奇异鲁棒控制的机械臂有限时间控制方法
本发明属于机械臂运动控制,具体是涉及一种基于非奇异鲁棒控制的机械臂有限时间控制方法。
背景技术:
1、随着工业生产中操作精度的提高与产能优化的迫切需要,多关节机械臂的控制技术受到广泛关注,例如汽车外壳漆面涂装与部件组装、电子元件的组装、微创手术的辅助系统等都有多关节机械臂的身影。对于机械臂的运动控制,往往给定一组预期轨迹,希望机械臂的各关节在控制率的作用下按照给定的轨迹运动。但是由于机械臂自身的参数不确定性以及运动过程中外部对机械臂的扰动,往往使得运动的实际轨迹与预期轨迹之间存在一定的误差,为保证机械臂的控制精度,我们希望误差能够在有限时间内收敛到零。
2、目前,机械臂的控制方法主要有:pid控制、鲁棒控制、模糊控制、有限时间鲁棒控制等。其中pid控制因为设计简单被广泛应用,但一般的pid控制难以同时获得良好的响应速度与误差收敛效果,同时对外部扰动的处理效果不够理想,不能满足高精度控制的需要;鲁棒控制有着收敛速度快、精度高、无超调等优点,使得系统的误差能够获得良好的收敛效果,但是却不能保证系统误差的收敛时间落在一个理想的范围内;有限时间鲁棒控制可以保证系统误差在有限时间内收敛,但是往往存在奇异值的问题,在实际的运动过程中奇异值会降低系统的安全性。
3、因此非奇异有限时间鲁棒控制应运而生,但是即使非奇异有限时间鲁棒控制能够避免奇异值的问题,但一般的非奇异有限时间鲁棒控制方法通常仅考虑外部对系统的扰动而没有对内部的参数不确定性作出进一步的讨论,同时在收敛速度方面仍有着十分大的改进空间。
技术实现思路
1、本发明要解决的技术问题是提供一种基于非奇异鲁棒控制的机械臂有限时间控制方法,用以解决系统在自身存在不确定性与外部对系统复杂扰动的情况下的有限时间鲁棒控制问题。
2、为了解决上述技术问题,本发明提供一种基于非奇异鲁棒控制的机械臂有限时间控制方法,包括的过程为:
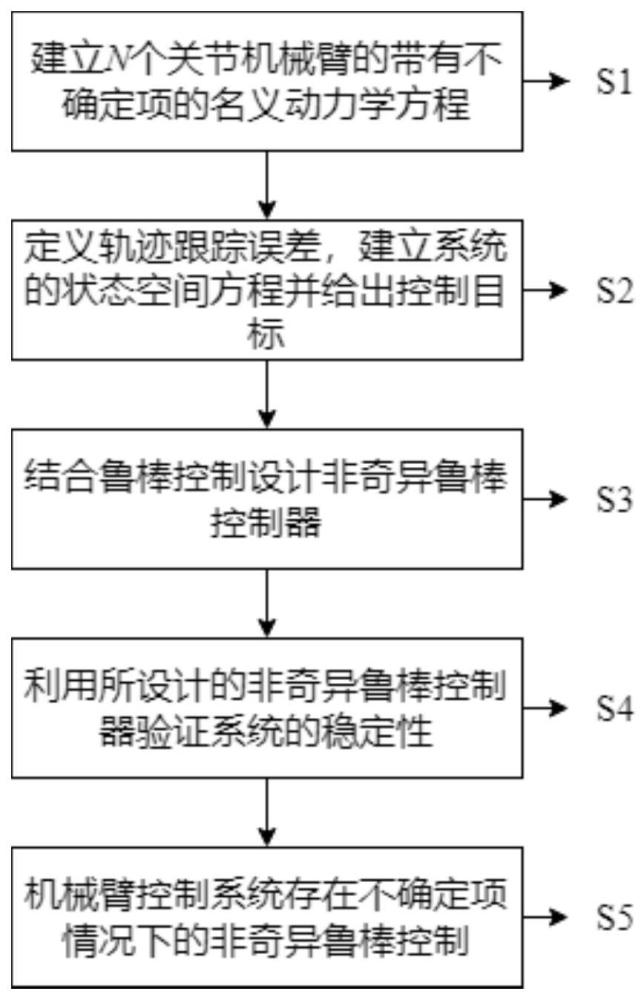
3、s1、建立n个关节的机械臂的带有不确定项的动力学模型;
4、s2、定义轨迹跟踪误差,建立状态空间方程和控制目标;
5、s3、结合鲁棒控制设计非奇异鲁棒控制器;
6、s4、确定机械臂各关节的初始状态与最终状态,通过多项式轨迹规划的方式得到预期轨迹δd,然后将机械臂上的传感器实时获得的轨迹跟踪误差σ、关节变量δ、关节变量的导数和非奇异鲁棒控制器组成闭环系统,实现非奇异鲁棒控制器对机械臂各个关节的实时控制。
7、作为本发明的一种基于非奇异鲁棒控制的机械臂有限时间控制方法的改进:
8、所述步骤s1建立n个关节的机械臂的带有不确定项的动力学模型的具体过程为:
9、步骤s1.1:n个关节机械臂的动力学模型为:
10、
11、其中,δ为机械臂的关节变量,单位是弧度,表示为关节变量δ的导数;i(δ)为机械臂自身参数与关节变量组成的惯性矩阵,是科氏力项与离心力项,g(δ)是重力项,ξ是力矩;机械臂自身参数包含质量、长度和转动惯量;
12、步骤s1.2:考虑系统的内部的不确定性,名义上的动力学模型为:
13、
14、其中,i0(δ)、g0(δ)为名义参数矩阵,是名义参数与实际参数之间的误差项,此外还包含了外界对系统的干扰:
15、其中d(t)为外界的扰动。
16、作为本发明的一种基于非奇异鲁棒控制的机械臂有限时间控制方法的进一步改进:
17、所述轨迹跟踪误差为:σ=δ-δd,其中,δd是给定的预期轨迹。
18、作为本发明的一种基于非奇异鲁棒控制的机械臂有限时间控制方法的进一步改进:
19、所述状态空间方程为:
20、
21、其中,x1=σ,u=ξ;
22、根据机械臂动力学参数假设:
23、
24、其中,a0、a1、a0均为正实数,||·||表示欧几里得范数。
25、作为本发明的一种基于非奇异鲁棒控制的机械臂有限时间控制方法的进一步改进:
26、所述控制目标为:在系统中存在参数不确定与外界扰动的情况下,机械臂的轨迹跟踪误差σ能够在有限的时间内收敛至0,从而保证实际运动轨迹δ与预期轨迹δd一致。
27、作为本发明的一种基于非奇异鲁棒控制的机械臂有限时间控制方法的进一步改进:
28、所述非奇异鲁棒控制函数为:
29、
30、其中,x11,x12,...,x1n为各个关节对应的轨迹跟踪误差,c是一个所有项均为正实数的对角矩阵,即c=diag(c1,...,cn);p、q均为正奇数,且p>q。
31、作为本发明的一种基于非奇异鲁棒控制的机械臂有限时间控制方法的进一步改进:
32、所述非奇异鲁棒控制器为:
33、
34、
35、其中,x21,x22,...,x2n为各个关节对应的x2。
36、本发明的有益效果主要体现在:
37、1、本发明在鲁棒控制基础上增加了新的控制项,系统误差在有限时间内收敛;
38、2、本发明设计的运动控制律中不包含切换项,控制信号抖动幅度更小,可以有效提升系统的控制精度;
39、3、本发明设计的运动控制律在鲁棒控制的基础上作出了调整,能够避免系统在运动过程中的奇异值问题,并且比一般的有限时间非奇异鲁棒控制有着更好的收敛速度;
40、4、本发明设计的运动控制律同时考虑了自身参数的不确定性以及外部对系统的复杂扰动,在系统的稳定性方面有着良好的表现。
技术特征:
1.一种基于非奇异鲁棒控制的机械臂有限时间控制方法,其特征在于,包括的过程为:
2.根据权利要求1所述的一种基于非奇异鲁棒控制的机械臂有限时间控制方法,其特征在于:
3.根据权利要求2所述的一种基于非奇异鲁棒控制的机械臂有限时间控制方法,其特征在于:
4.根据权利要求3所述的一种基于非奇异鲁棒控制的机械臂有限时间控制方法,其特征在于:
5.根据权利要求4所述的一种基于非奇异鲁棒控制的机械臂有限时间控制方法,其特征在于:
6.根据权利要求5所述的一种基于非奇异鲁棒控制的机械臂有限时间控制方法,其特征在于:
7.根据权利要求6所述的一种基于非奇异鲁棒控制的机械臂有限时间控制方法,其特征在于:
技术总结
本发明涉及机械臂运动控制技术领域,公开了一种基于非奇异鲁棒控制的机械臂有限时间控制方法,包括建立N个关节的机械臂的带有不确定项的动力学模型;定义轨迹跟踪误差,建立状态空间方程和控制目标;结合鲁棒控制设计非奇异鲁棒控制器;确定机械臂各关节的初始状态与最终状态并得到预期轨迹,然后将实时获得的轨迹跟踪误差、关节变量、关节变量的导数和非奇异鲁棒控制器组成闭环系统,实现对各个关节的实时控制。本发明的运动控制律在鲁棒控制的基础上作出了改进,避免系统在运动过程中的奇异值问题,并且比一般的有限时间非奇异鲁棒控制有着更好的收敛速度;同时考虑了自身参数的不确定性以及外部扰动,在系统的稳定性方面有着良好的表现。
技术研发人员:高金凤,谭仲昊,贾国强,李乐宝
受保护的技术使用者:浙江理工大学
技术研发日:
技术公布日:2024/4/17
- 还没有人留言评论。精彩留言会获得点赞!