抓取方法、装置、电子设备和存储介质与流程
本公开涉及导航,尤其涉及抓取方法、装置、电子设备和存储介质。
背景技术:
1、在现代化学实验室中,物体的精确识别和操控对于实验的成功至关重要。随着自动化技术的进步,机器人系统被广泛应用于实验室环境中,以提高操作的准确性和效率,同时降低人为错误。机器人系统对物体的精确识别和操控一般有赖于物体位姿。
2、相关技术中,常采用传统的图像处理方法对物体位姿进行预测,这些预测方法不仅容易受到复杂的实验室环境(如多变的光照条件、器皿的透明性质以及操作空间)的限制而导致物体的误检或漏检,还会在物体标签被部分遮挡时导致识别效果不佳,从而降低了抓取动作的准确性。
技术实现思路
1、有鉴于此,本公开实施例提供了一种抓取方法、装置、电子设备和存储介质,以解决相关技术中存在的问题。
2、本公开实施例的第一方面,提供了一种抓取方法,包括:
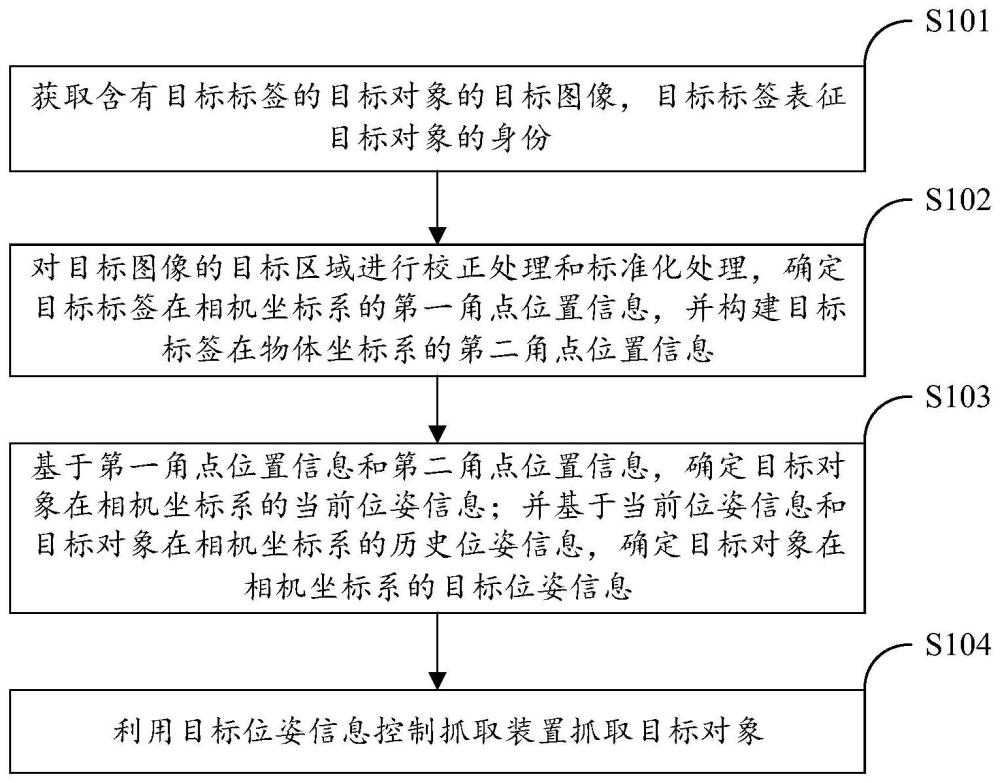
3、获取含有目标标签的目标对象的目标图像,所述目标标签表征所述目标对象的身份;
4、对所述目标图像的目标区域进行校正处理和标准化处理,确定所述目标标签在相机坐标系的第一角点位置信息,并构建所述目标标签在物体坐标系的第二角点位置信息;
5、基于所述第一角点位置信息和所述第二角点位置信息,确定所述目标对象在所述相机坐标系的当前位姿信息;并基于所述当前位姿信息和所述目标对象在所述相机坐标系的历史位姿信息,确定所述目标对象在所述相机坐标系的目标位姿信息;
6、利用所述目标位姿信息控制抓取装置抓取所述目标对象。
7、本公开实施例的第二方面,提供了一种抓取装置,包括:
8、获取模块,用于获取含有目标标签的目标对象的目标图像,所述目标标签表征所述目标对象的身份;
9、处理模块,用于对所述目标图像的目标区域进行校正处理和标准化处理,确定所述目标标签在相机坐标系的第一角点位置信息;构建模块,用于所述目标标签在物体坐标系的第二角点位置信息;
10、确定模块,用于基于所述第一角点位置信息和所述第二角点位置信息,确定所述目标对象在所述相机坐标系的当前位姿信息;并基于所述当前位姿信息和所述目标对象在所述相机坐标系的历史位姿信息,确定所述目标对象在所述相机坐标系的目标位姿信息;
11、抓取模块,用于利用所述目标位姿信息控制抓取装置抓取所述目标对象。
12、本公开实施例的第三方面,提供了一种电子设备,包括:至少一个处理器;用于存储至少一个处理器可执行指令的存储器;其中,至少一个处理器用于执行指令,以实现上述方法的步骤。
13、本公开实施例的第四方面,提供了一种计算机可读存储介质,当计算机可读存储介质中的指令由电子设备的处理器执行时,使得电子设备能够执行上述方法的步骤。
14、本公开实施例采用的上述至少一个技术方案能够达到以下有益效果:通过获取含有目标标签的目标对象的目标图像,目标标签表征目标对象的身份;对目标图像的目标区域进行校正处理和标准化处理,确定目标标签在相机坐标系的第一角点位置信息,并构建目标标签在物体坐标系的第二角点位置信息;基于第一角点位置信息和第二角点位置信息,确定目标对象在相机坐标系的当前位姿信息;并基于当前位姿信息和目标对象在相机坐标系的历史位姿信息,确定目标对象在相机坐标系的目标位姿信息;利用目标位姿信息控制抓取装置抓取目标对象,能够通过校正处理避免由光照不均和拍摄角度引起的误检或漏检,并对目标对象的目标位姿信息进行精准预测,从而提高了抓取动作的准确性。
技术特征:
1.一种抓取方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,所述对所述目标图像的目标区域进行校正处理和标准化处理,确定所述目标标签在相机坐标系的第一角点位置信息,包括:
3.根据权利要求1所述的方法,其特征在于,所述构建所述目标标签在物体坐标系的第二角点位置信息,包括:
4.根据权利要求1所述的方法,其特征在于,所述当前位姿信息包括当前位置信息和当前姿态信息,所述当前位置信息包括当前时刻所述目标对象的几何中心在所述相机坐标系的坐标,所述当前姿态信息表征当前时刻所述目标对象在所述相机坐标系的姿态;所述基于所述第一角点位置信息和所述第二角点位置信息,确定所述目标对象在所述相机坐标系的当前位姿信息,包括:
5.根据权利要求2所述的方法,其特征在于,所述历史位姿信息的数量为多个,所述基于所述当前位姿信息和所述目标对象在所述相机坐标系的历史位姿信息,确定所述目标对象在所述相机坐标系的目标位姿信息,包括:
6.根据权利要求1所述的方法,其特征在于,所述利用所述目标位姿信息控制抓取装置抓取所述目标对象,包括:
7.根据权利要求1~6中任一项所述的方法,其特征在于,所述对所述目标图像的目标区域进行校正处理和标准化处理,确定所述目标标签在相机坐标系的第一角点位置信息前,所述方法还包括:
8.一种抓取装置,其特征在于,包括:
9.一种电子设备,其特征在于,包括:
10.一种计算机可读存储介质,其特征在于,当所述计算机可读存储介质中的指令由电子设备的处理器执行时,使得所述电子设备能够执行如权利要求1~7中任一项所述的方法的步骤。
技术总结
本公开涉及抓取方法、装置、电子设备和存储介质。该抓取方法包括:获取含有目标标签的目标对象的目标图像,目标标签表征目标对象的身份;对目标图像的目标区域进行校正处理和标准化处理,确定目标标签在相机坐标系的第一角点位置信息,并构建目标标签在物体坐标系的第二角点位置信息;基于第一角点位置信息和第二角点位置信息,确定目标对象在相机坐标系的当前位姿信息;并基于当前位姿信息和目标对象在相机坐标系的历史位姿信息,确定目标对象在相机坐标系的目标位姿信息;利用目标位姿信息控制抓取装置抓取目标对象。本公开能够对目标对象的目标位姿信息进行精准预测,从而提高了抓取动作的准确性。
技术研发人员:李非凡,邢加伟,徐洋洋,王芳,郁肖飞,沈志航,冯昌国
受保护的技术使用者:航天科工智能机器人有限责任公司
技术研发日:
技术公布日:2024/4/24
- 还没有人留言评论。精彩留言会获得点赞!