机器人碰撞测试方法及系统与流程
本申请涉及机器人,尤其涉及一种机器人碰撞测试方法及系统。
背景技术:
1、随着机器人在各个领域的应用不断扩大,为了使机器人的效率最大化,提高其行驶速度是必然趋势。但在提高机器人的行驶速度时,也需要对机器人进行防碰撞测试,以保证在行人或障碍物突然出现时,机器人能够做出及时而准确的反应,从而确保行人和机器人、障碍物与机器人之间不会发生碰撞。
2、但是,目前对机器人进行防碰撞能力测试时,主要是依靠人工进行测试,从而导致测试智能化不足。
技术实现思路
1、本申请的主要目的在于提供一种机器人碰撞测试方法及系统,旨在解决测试智能化不足的技术问题。
2、为实现上述目的,本申请提供一种机器人碰撞测试方法,包括:
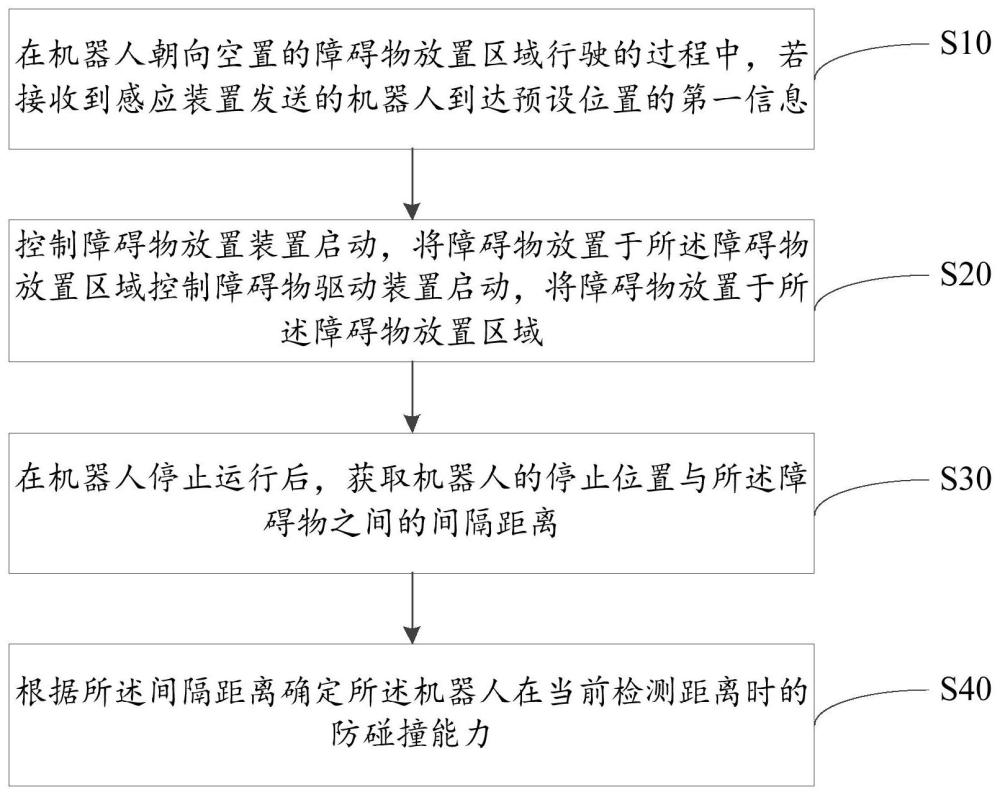
3、在机器人朝向空置的障碍物放置区域行驶的过程中,若接收到感应装置发送的机器人到达预设位置的第一信息;
4、控制障碍物驱动装置启动,将障碍物放置于所述障碍物放置区域;
5、在机器人停止运行后,获取机器人的停止位置与所述障碍物之间的间隔距离;
6、根据所述间隔距离确定所述机器人在当前检测距离时的防碰撞能力,其中,所述当前检测距离为所述感应装置与所述障碍物放置区域之间的距离。
7、可选地,所述根据所述间隔距离确定所述机器人在当前检测距离时的防碰撞能力,包括:
8、若所述间隔距离小于或等于预设间隔距离,则确定所述机器人的防碰撞能力不合格;
9、若所述间隔距离大于预设间隔距离,则确定所述机器人的防碰撞能力合格。
10、可选地,所述机器人朝向空置的障碍物放置区域行驶,包括:
11、对机器人配置测试速度;
12、根据所述测试速度控制机器人朝向空置的障碍物放置区域行驶。
13、可选地,确定所述机器人的防碰撞能力不合格之后,所述方法还包括:
14、调整所述障碍物放置区域与所述感应装置之间的检测距离;
15、返回执行所述在机器人朝向空置的障碍物放置区域行驶的过程中,若接收到感应装置发送的机器人到达预设位置的第一信息的步骤及后续步骤。
16、可选地,所述感应装置为红外感应装置、雷达感应装置或者光电感应装置中的任一者。
17、第二方面,本申请提供一种机器人碰撞测试系统,包括:
18、感应装置,所述感应装置与障碍物驱动装置连接,用于在检测到机器人经过预设位置后,发送机器人到达预设位置的第一信息至障碍物驱动装置;
19、所述障碍物驱动装置,用于在接收到机器人到达预设位置的第一信息后,控制障碍物驱动装置启动,将障碍物放置于所述障碍物放置区域。
20、可选地,所述系统还包括速度调整器,所述速度调整器与所述机器人通信连接,用于发送测试速度至所述机器人,以使所述机器人以所述测试速度行驶。
21、可选地,所述系统还包括距离检测装置,用于在机器人停止运行后,检测机器人当前位置与障碍物之间的间隔距离。
22、可选地,所述系统还包括:
23、感应装置安装件,所述感应装置安装件沿所述机器人的测试区域的延伸方向设置,其中,所述机器人在所述测试区域朝向所述障碍物放置区域行驶;
24、其中,所述感应装置设置于所述感应装置安装件。
25、可选地,所述障碍物驱动装置包括:
26、机架,所述机架设置于所述障碍物放置区域的一侧;
27、电机控制件,所述电机控制件设置于所述机架,所述电机控制件与传动组件连接,用于控制驱动件;
28、传动组件,所述传动组件设置于所述机架,所述障碍物可拆卸地安装于所述传动组件,所述传动组件用于将所述障碍物从所述机架内移动至所述障碍物放置区域内;以及
29、驱动件,所述驱动件用于驱动所述传动组件。
30、本申请实施例提出的一种机器人碰撞测试方法,该方法包括:在机器人朝向空置的障碍物放置区域行驶的过程中,若接收到感应装置发送的机器人到达预设位置的第一信息;控制障碍物驱动装置启动,将障碍物放置于所述障碍物放置区域;在机器人停止运行后,获取机器人的停止位置与所述障碍物之间的间隔距离;根据所述间隔距离确定所述机器人在当前检测距离时的防碰撞能力,其中,所述当前检测距离为所述感应装置与所述障碍物放置区域之间的距离。
31、相较于相关技术中,依靠人突然出现或者手拿物品对机器人的防碰撞能力进行测试,本申请实施例在机器人在朝控制的障碍物放置区域行驶的过程中,利用机电控制装置控制障碍物驱动装置启动,将障碍物放置于障碍物放置区域,进行机器人的防碰撞能力的测试,也即是本申请实施例在对机器人的防碰撞能力进行测试时,可以利用障碍物驱动装置将障碍物临时或者突然地放置于障碍物放置区域,以替代人突然出现或者手拿物品,从而保障了机器人防碰撞能力测试的安全性。
技术特征:
1.一种机器人碰撞测试方法,其特征在于,所述方法包括:
2.根据权利要求1所述的机器人碰撞测试方法,其特征在于,所述根据所述间隔距离确定所述机器人在当前检测距离时的防碰撞能力,包括:
3.根据权利要求1所述的机器人碰撞测试方法,其特征在于,所述机器人朝向空置的障碍物放置区域行驶,包括:
4.根据权利要求2所述的机器人碰撞测试方法,其特征在于,确定所述机器人的防碰撞能力不合格之后,所述方法还包括:
5.根据权利要求1所述的机器人碰撞测试方法,其特征在于,所述感应装置为红外感应装置、雷达感应装置或者光电感应装置中的任一者。
6.一种机器人碰撞测试系统,其特征在于,所述系统包括:
7.根据权利要求6所述的机器人碰撞测试系统,其特征在于,所述系统还包括速度调整器,所述速度调整器与所述机器人通信连接,用于发送测试速度至所述机器人,以使所述机器人以所述测试速度行驶。
8.根据权利要求6所述的机器人碰撞测试系统,其特征在于,所述系统还包括距离检测装置,用于在机器人停止运行后,检测机器人当前位置与障碍物之间的间隔距离。
9.根据权利要求6所述的机器人碰撞测试系统,其特征在于,所述系统还包括:
10.根据权利要求6所述的机器人碰撞测试系统,其特征在于,所述障碍物驱动装置包括:
技术总结
本申请公开了一种机器人碰撞测试方法及系统,属于机器人技术领域,该方法包括:在机器人朝向空置的障碍物放置区域行驶的过程中,若接收到感应装置发送的机器人到达预设位置的第一信息;控制障碍物驱动装置启动,将障碍物放置于所述障碍物放置区域;在机器人停止运行后,获取机器人的停止位置与所述障碍物之间的间隔距离;根据所述间隔距离确定所述机器人在当前检测距离时的防碰撞能力,其中,所述当前检测距离为所述感应装置与所述障碍物放置区域之间的距离。本申请可以利用障碍物驱动装置将障碍物临时或者突然地放置于障碍物放置区域,以替代人突然出现或者手拿物品,从而保障了机器人防碰撞能力测试的安全性。
技术研发人员:夏舸,吴强
受保护的技术使用者:深圳优地智能有限公司
技术研发日:
技术公布日:2024/4/24
- 还没有人留言评论。精彩留言会获得点赞!