一种自动上下料抓取机械手的制作方法
本技术属于机械手,更具体地说,特别涉及一种自动上下料抓取机械手。
背景技术:
1、在现今的生活上 ,科技日新月益的进展之下 ,机械人手臂与有人类的手臂最大区别就在于灵活度与耐力度。也就是机械手的最大优势可以重复的做同一动作在机械正常情况下永远也不会觉得累。机械手臂的应用也将会越来越广泛,机械手是近几十年发展起来的一种高科技自动生产设备,作业的准确性和环境中完成作业的能力。工业机械手机器人的一个重要分支。按驱动方式可分为液压式、气动式、电动式、机械式。特点是可以通过编程来完成各种预期的作业,构造和性能上兼有人和机械手机器各自的优点。
2、但是目前的机械手虽然可以抓取工件,但是整体上需要人工手动调节距离与工位,并且这种机械手夹持运输工件效率太低,不能对大批量工件进行快速夹持搬运。
技术实现思路
1、针对现有技术的不足,本实用新型提供了一种自动上下料抓取机械手,以解决上述背景技术中提出的问题。
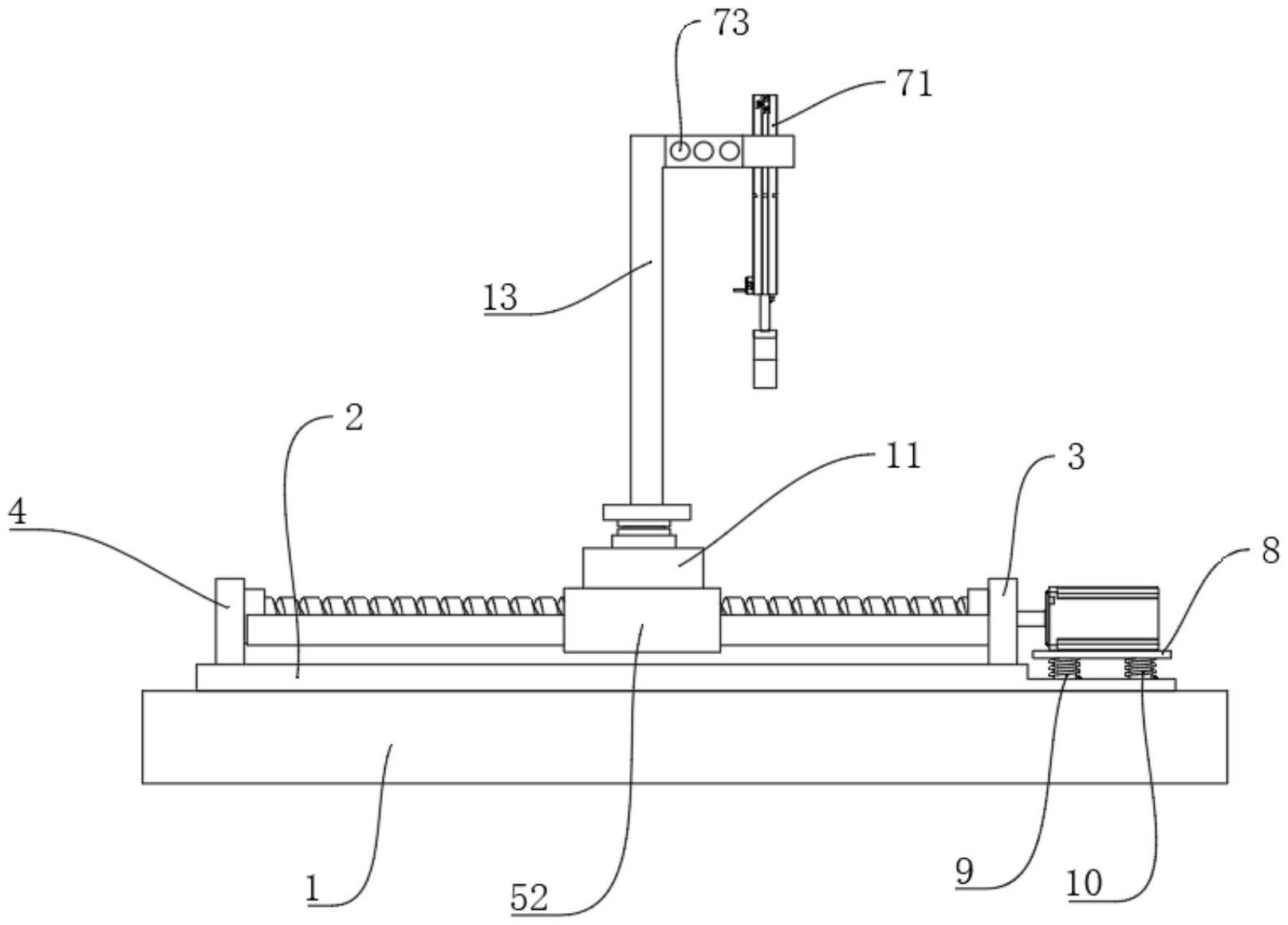
2、为实现以上目的,本实用新型通过以下技术方案予以实现:一种自动上下料抓取机械手,包括安装底座,安装底座上设有固定连接的工作台,所述工作台表面设有第一支撑板、第二支撑板,所述第一支撑板与第二支撑板之间设有导向机构,所述导向机构包括位于两侧第一支撑板、第二支撑板之间的转动连接的滚珠丝杆,位于滚珠丝杆两侧的与第一支撑板、第二支撑板固定连接的第一支杆、第二支杆,与滚珠丝杆螺纹连接的移动架,所述移动架贯穿两侧的第一支杆、第二支杆;所述移动架上设有固定连接的气缸架,所述气缸架上设有旋转气缸,所述旋转气缸的输出轴上设有固定连接的安装架,所述安装架顶部设有抓取机构。
3、优选的,所述抓取机构包括位于安装架顶部的升降气缸,位于升降气缸的活塞杆上的气动夹爪,位于安装架上的与升降气缸、气动夹爪控制连接的开关组。
4、优选的,所述第一支撑板一侧设有伺服电机,所述伺服电机的输出轴与滚珠丝杆固定连接。
5、优选的,所述气动夹爪表面设有安装槽,所述安装槽内设有防滑支撑垫。
6、优选的,所述伺服电机底部设有稳定板,所述稳定板下方通过安装柱与工作台固定连接,所述安装柱表面还设有缓冲弹簧架。
7、本实用新型提供了一种自动上下料抓取机械手,具备以下有益效果:
8、1、该装置采用伺服电机驱动丝杆转动,实现抓取机械手的自动化往复移动,运行高效,输送稳定,自动化程度高。
9、2、该装置采用升降气缸带动气动夹爪对工件实现稳定牢靠抓取,并通过防滑支撑垫进一步加强稳定性,然后通过旋转气缸实现上下料转向,自动化与机械化程度高,减少了人为操作,避免了工作风险,提高了工件抓取的效率。
技术特征:
1.一种自动上下料抓取机械手,包括安装底座(1),其特征在于:所述安装底座(1)上设有固定连接的工作台(2),所述工作台(2)表面设有第一支撑板(3)、第二支撑板(4),所述第一支撑板(3)与第二支撑板(4)之间设有导向机构(5),所述导向机构(5)包括位于两侧第一支撑板(3)、第二支撑板(4)之间的转动连接的滚珠丝杆(51),位于滚珠丝杆(51)两侧的与第一支撑板(3)、第二支撑板(4)固定连接的第一支杆(53)、第二支杆(54),与滚珠丝杆(51)螺纹连接的移动架(52),所述移动架(52)贯穿两侧的第一支杆(53)、第二支杆(54);所述移动架(52)上设有固定连接的气缸架(11),所述气缸架(11)上设有旋转气缸(12),所述旋转气缸(12)的输出轴上设有固定连接的安装架(13),所述安装架(13)顶部设有抓取机构(7)。
2.根据权利要求1所述的一种自动上下料抓取机械手,其特征在于:所述抓取机构(7)包括位于安装架(13)顶部的升降气缸(71),位于升降气缸(71)的活塞杆上的气动夹爪(72),位于安装架(13)上的与升降气缸(71)、气动夹爪(72)控制连接的开关组(73)。
3.根据权利要求1所述的一种自动上下料抓取机械手,其特征在于:所述第一支撑板(3)一侧设有伺服电机(6),所述伺服电机(6)的输出轴与滚珠丝杆(51)固定连接。
4.根据权利要求2所述的一种自动上下料抓取机械手,其特征在于:所述气动夹爪(72)表面设有安装槽,所述安装槽内设有防滑支撑垫(14)。
5.根据权利要求3所述的一种自动上下料抓取机械手,其特征在于:所述伺服电机(6)底部设有稳定板(8),所述稳定板(8)下方通过安装柱(9)与工作台(2)固定连接,所述安装柱(9)表面还设有缓冲弹簧架(10)。
技术总结
本技术公开了一种自动上下料抓取机械手,包括安装底座,安装底座上设有固定连接的工作台,工作台表面设有第一支撑板、第二支撑板,第一支撑板与第二支撑板之间设有导向机构,导向机构包括位于两侧第一支撑板、第二支撑板之间的转动连接的滚珠丝杆,位于滚珠丝杆两侧的与第一支撑板、第二支撑板固定连接的第一支杆、第二支杆,与滚珠丝杆螺纹连接的移动架,所述移动架贯穿两侧的第一支杆、第二支杆,移动架上设有固定连接的气缸架,气缸架上设有旋转气缸,旋转气缸的输出轴上设有固定连接的安装架,安装架顶部设有抓取机构。
技术研发人员:曲东娜
受保护的技术使用者:无锡百禾工业机器人有限公司
技术研发日:20230104
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!