轨道机器人的集尘清理装置的制作方法
本技术涉及轨道机器人,具体为轨道机器人的集尘清理装置。
背景技术:
1、输煤皮带常常需要设置巡检机器人进行皮带的状态进行巡检,对输煤量、皮带撕裂情况、跑偏情况以及环境参数的感知进行监测,目前的巡检使用顶部轨道机器人进行来回巡检,即通过轨道导向对云台进行行走,使得云台底部的探头传感器对皮带状态监测,目前的轨道机器人都是直接沿轨道进行行走,而在输煤皮带处,煤粉等粉尘量大,粉尘会积附到轨道上,给机器人的行走带来阻力,容易导致行走轮发生磨损,影响机器人的移动,针对上述问题,发明人提出轨道机器人的集尘清理装置用于解决上述问题。
技术实现思路
1、为了解决目前的轨道机器人都是直接沿轨道进行行走,而在输煤皮带处,煤粉等粉尘量大,粉尘会积附到轨道上,给机器人的行走带来阻力,容易导致行走轮发生磨损,影响机器人的移动的问题;本实用新型的目的在于提供轨道机器人的集尘清理装置。
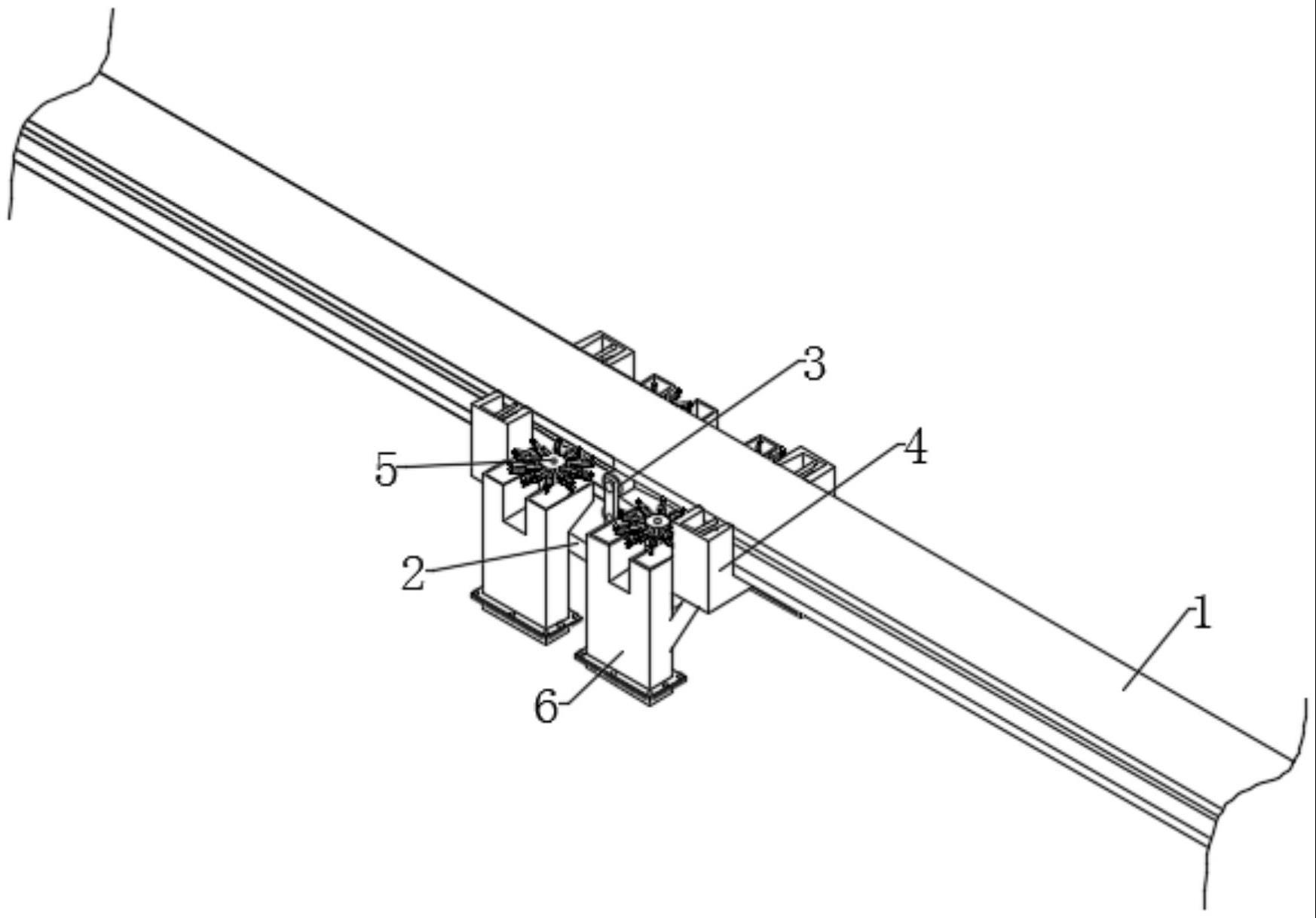
2、为解决上述技术问题,本实用新型采用如下技术方案:轨道机器人的集尘清理装置,包括轨道,所述轨道的底部设有移动板,所述移动板与轨道间安装有行走机构,所述移动板的两端与轨道间安装有外壁清理机构,所述移动板的侧壁顶部与轨道间安装有内壁清理机构,所述移动板的外壁固定安装有集尘机构,且外壁清理机构和内壁清理机构均连接集尘机构。
3、优选的,所述轨道的横截面为“工”字型结构,所述移动板的底部固定安装有云台,所述云台的底部安装有探头。
4、优选的,所述行走机构包括电机,所述移动板的底部固定安装有电机,所述电机的输出轴贯穿移动板并固定套接有齿轮,所述轨道的底部固定安装有齿条,所述齿轮啮合齿条,所述移动板的两侧顶部均固定安装有固定板,所述固定板上转动安装有两个滚轮,所述滚轮转动贴合轨道的两侧“工”字型底部,所述固定板两侧的移动板顶部均转动套接有限位轮,所述限位轮转动贴合轨道的侧壁。
5、优选的,所述滚轮的间距等于轨道的“工”字型底板厚度,一个所述滚轮贴合轨道的两侧凹槽底部,另一个所述滚轮贴合轨道的底面。
6、优选的,所述限位轮的底部滑动贴合轨道的侧壁底部,所述限位轮的顶部外壁安装有内壁清理机构,所述内壁清理机构伸入轨道的侧壁凹槽内。
7、优选的,所述内壁清理机构包括固定块,所述限位轮的外壁顶部固定安装有多个固定块,所述固定块内滑动卡接有滑动块,所述滑动块的底部贯穿固定块,所述固定块和滑动块的底部均固定安装有内壁毛刷,所述固定块的内壁开有导向槽,所述滑动块的外壁固定安装有导向块,所述导向块滑动卡接导向槽,所述导向块与导向槽靠近限位轮的一端间安装有弹簧。
8、优选的,所述滑动块远离限位轮的一端为半圆柱弧面结构,所述内壁毛刷的长度大于固定块和滑动块底面到轨道侧壁凹槽底部的距离。
9、优选的,所述外壁清理机构包括u型框,所述移动板的两端均固定安装有u型框,所述u型框的两侧内壁固定安装有侧壁毛刷,所述u型框的内壁底部固定安装有底部毛刷,所述u型框的底部两端均固定套接有导流管的一端,所述导流管的另一端固定套接集尘机构。
10、优选的,所述u型框的内壁底部为中间高两边低的锥形结构,所述导流管为倾斜结构,所述侧壁毛刷贴合轨道的侧壁,所述底部毛刷贴合轨道的底部。
11、优选的,所述集尘机构包括集尘盒,所述移动板的侧壁两端均固定安装有集尘盒,所述集尘盒的顶部固定套接有落灰口,所述落灰口正对限位轮两侧的轨道侧壁,所述落灰口的内壁底部设有导流斜面,所述导流管固定套接在集尘盒的侧壁,所述集尘盒的底部设有底盒,所述集尘盒的底部外壁与底盒的顶部外壁套接有法兰,所述法兰间通过螺栓栓接。
12、与现有技术相比,本实用新型的有益效果在于:
13、1、限位轮滚动时,带动固定块转动,当固定块转入轨道侧壁凹槽时,滑动块接触轨道内壁,从而滑动块挤压弹簧,使得滑动块和固定块底部的内壁毛刷将轨道内壁底部的积灰扫落到轨道外侧,移动板移动时,u型框内壁的侧壁毛刷和底部毛刷将轨道侧壁和底部的积灰刷落;
14、2、底部毛刷刷落的灰尘通过落灰口落入集尘盒内,导流管内的灰尘导流到集尘盒内,从而使得灰尘收集在集尘盒和底盒内,长期使用后,将法兰间螺栓拆下,取下底盒,从而清理收集的灰尘,使用便捷,实现对轨道上的积灰同步清理的目的,便于行走机构移动。
技术特征:
1.轨道机器人的集尘清理装置,包括轨道(1),其特征在于:所述轨道(1)的底部设有移动板(2),所述移动板(2)与轨道(1)间安装有行走机构(3),所述移动板(2)的两端与轨道(1)间安装有外壁清理机构(4),所述移动板(2)的侧壁顶部与轨道(1)间安装有内壁清理机构(5),所述移动板(2)的外壁固定安装有集尘机构(6),且外壁清理机构(4)和内壁清理机构(5)均连接集尘机构(6)。
2.如权利要求1所述的轨道机器人的集尘清理装置,其特征在于,所述轨道(1)的横截面为“工”字型结构,所述移动板(2)的底部固定安装有云台(7),所述云台(7)的底部安装有探头(8)。
3.如权利要求2所述的轨道机器人的集尘清理装置,其特征在于,所述行走机构(3)包括电机(31),所述移动板(2)的底部固定安装有电机(31),所述电机(31)的输出轴贯穿移动板(2)并固定套接有齿轮(32),所述轨道(1)的底部固定安装有齿条(33),所述齿轮(32)啮合齿条(33),所述移动板(2)的两侧顶部均固定安装有固定板(34),所述固定板(34)上转动安装有两个滚轮(35),所述滚轮(35)转动贴合轨道(1)的两侧“工”字型底部,所述固定板(34)两侧的移动板(2)顶部均转动套接有限位轮(36),所述限位轮(36)转动贴合轨道(1)的侧壁。
4.如权利要求3所述的轨道机器人的集尘清理装置,其特征在于,所述滚轮(35)的间距等于轨道(1)的“工”字型底板厚度,一个所述滚轮(35)贴合轨道(1)的两侧凹槽底部,另一个所述滚轮(35)贴合轨道(1)的底面。
5.如权利要求3所述的轨道机器人的集尘清理装置,其特征在于,所述限位轮(36)的底部滑动贴合轨道(1)的侧壁底部,所述限位轮(36)的顶部外壁安装有内壁清理机构(5),所述内壁清理机构(5)伸入轨道(1)的侧壁凹槽内。
6.如权利要求5所述的轨道机器人的集尘清理装置,其特征在于,所述内壁清理机构(5)包括固定块(51),所述限位轮(36)的外壁顶部固定安装有多个固定块(51),所述固定块(51)内滑动卡接有滑动块(52),所述滑动块(52)的底部贯穿固定块(51),所述固定块(51)和滑动块(52)的底部均固定安装有内壁毛刷(53),所述固定块(51)的内壁开有导向槽(54),所述滑动块(52)的外壁固定安装有导向块(55),所述导向块(55)滑动卡接导向槽(54),所述导向块(55)与导向槽(54)靠近限位轮(36)的一端间安装有弹簧(56)。
7.如权利要求6所述的轨道机器人的集尘清理装置,其特征在于,所述滑动块(52)远离限位轮(36)的一端为半圆柱弧面结构,所述内壁毛刷(53)的长度大于固定块(51)和滑动块(52)底面到轨道(1)侧壁凹槽底部的距离。
8.如权利要求6所述的轨道机器人的集尘清理装置,其特征在于,所述外壁清理机构(4)包括u型框(41),所述移动板(2)的两端均固定安装有u型框(41),所述u型框(41)的两侧内壁固定安装有侧壁毛刷(42),所述u型框(41)的内壁底部固定安装有底部毛刷(43),所述u型框(41)的底部两端均固定套接有导流管(44)的一端,所述导流管(44)的另一端固定套接集尘机构(6)。
9.如权利要求8所述的轨道机器人的集尘清理装置,其特征在于,所述u型框(41)的内壁底部为中间高两边低的锥形结构,所述导流管(44)为倾斜结构,所述侧壁毛刷(42)贴合轨道(1)的侧壁,所述底部毛刷(43)贴合轨道(1)的底部。
10.如权利要求8所述的轨道机器人的集尘清理装置,其特征在于,所述集尘机构(6)包括集尘盒(61),所述移动板(2)的侧壁两端均固定安装有集尘盒(61),所述集尘盒(61)的顶部固定套接有落灰口(62),所述落灰口(62)正对限位轮(36)两侧的轨道(1)侧壁,所述落灰口(62)的内壁底部设有导流斜面(63),所述导流管(44)固定套接在集尘盒(61)的侧壁,所述集尘盒(61)的底部设有底盒(64),所述集尘盒(61)的底部外壁与底盒(64)的顶部外壁套接有法兰(65),所述法兰(65)间通过螺栓栓接。
技术总结
本技术公开了轨道机器人的集尘清理装置,包括轨道,轨道的底部设有移动板,移动板与轨道间安装有行走机构,移动板的两端与轨道间安装有外壁清理机构,移动板的侧壁顶部与轨道间安装有内壁清理机构,移动板的外壁固定安装有集尘机构,且外壁清理机构和内壁清理机构均连接集尘机构。通过行走机构满足移动板沿轨道行走的目的,并且行走时,同步清理轨道的外壁以及两侧内凹的内壁,将积灰扫落收集到集尘机构内,便于行走机构移动。
技术研发人员:林周勇,陈优异,辛剑军
受保护的技术使用者:国能(泉州)热电有限公司
技术研发日:20230106
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!