一种燃料电池发动机用机械手操作装置的制作方法
本技术涉及燃料电池发动机,尤其涉及一种燃料电池发动机用机械手操作装置。
背景技术:
1、目前,现有技术中对燃料电池发动机翻转的助力机械手辅助装置大多是翻转小车,参见专利cn202130362479.4。
2、燃料电池发动机只能在小车上翻转,只能随小车移动,无法脱离小车自由移动。并且,小车尺寸相对固定,无法灵活兼容不同尺寸规格的产品。产品上下小车需要借助外部吊装设备,自身无法完成,需额外投资。
技术实现思路
1、鉴于上述的分析,本实用新型实施例旨在提供一种燃料电池发动机用机械手操作装置,用以解决现有技术无法灵活应用于各类场合且无法兼容不同规格产品的问题。
2、一方面,本实用新型实施例提供了一种燃料电池发动机用机械手操作装置,包括待立柱式支架、设于立柱式支架顶部一侧的配重机构,设于立柱式支架顶部另一侧且依次连接的机械臂、翻转机构;其中,
3、配重机构、机械臂分别固定于同一旋转轴的两端,该旋转轴的旋转中心设于立柱式支架顶部;配重机构上配置有可拆卸且与待操作燃料电池发动机或其工件质量相等的配重物;
4、翻转机构包括万向铰接座、抱持单元、翻转单元;抱持单元包括夹紧气缸和由夹紧气缸驱动的夹爪,夹紧气缸通过万向铰接座固定于机械臂的移动端部;翻转单元包括翻转气缸和由翻转气缸驱动的旋转机构,旋转机构与待操作燃料电池发动机或其工件的壳体进行固定连接。
5、上述技术方案的有益效果如下:通过设置抱持单元、翻转单元、机械臂、配重机构的组合可实现待操作工件的抓取、翻转、移动、悬停功能。夹爪可根据不同产品进行灵活拆卸和更换,有效降低生产换型损失。借助配重及夹紧气缸、旋转气缸的气路控制,机械手操作装置具备平衡助力功能,操作者可自由移动机械臂。充分满足人机工程、安全操作、高效生产的应用要求,动力方式可仅使用压缩空气,能满足待操作燃料电池发动机及其工件升降、翻转等多自由度的独立运动方式,应用范围广。
6、基于上述装置的进一步改进,所述机械臂进一步包括主臂、主臂驱动器、前臂、前臂驱动器;其中,
7、主臂的一端分别与立柱式支架顶部的旋转轴、主臂驱动器的输出轴固定连接,其另一端通过轴承与前臂的一端连接;
8、前臂的一端还与前臂驱动器的输出轴连接,其另一端与万向铰接座固定连接;
9、主臂驱动器、前臂驱动器采用气动式驱动结构、驱动电机中的一种。
10、进一步,所述旋转机构进一步包括依次连接的运动挡块、运动齿条、夹爪齿轮;其中,
11、运动挡块及运动齿条之间为刚性连接,运动齿条与夹爪齿轮为啮合连接;
12、翻转气缸的输出轴设置为上下移动,运动挡块、运动齿条固定于翻转气缸的输出轴端部;夹爪齿轮与夹爪固定连接。
13、进一步,所述翻转单元还包括用于调整翻转速度的无杆腔节流阀、有杆腔节流阀;其中,
14、无杆腔节流阀设置于翻转气缸的顶部;
15、有杆腔节流阀设置于翻转气缸的底部。
16、进一步,所述抱持单元还包括用于对夹爪进行锁死操作的安全互锁机构。
17、进一步,该机械手操作装置还包括气源、缓冲气缸、安装基座;并且,
18、夹紧气缸、翻转气缸上分别设有可与气源连接的通气口,每一所述通气口处均设有控制气流导通的控制阀;
19、立柱式支架的底部通过缓冲气缸与安装基座连接。
20、进一步,该机械手操作装置还包括用于接收到移动指令后向主臂驱动器、前臂驱动器发出相应移动控制信号以及接收到夹紧指令后控制气源向夹紧气缸通气以及接收到翻转指令后控制气源向翻转气缸通气的控制器;其中,
21、控制器的输出端分别与夹紧气缸、翻转气缸通气口处的控制阀以及主臂驱动器、前臂驱动器的控制端连接。
22、进一步,所述控制器具有用于与用户交互的操作手柄;其中,
23、操作手柄上设有用于向主臂驱动器、前臂驱动器发出相应移动控制信号的位移按钮,用于控制待操作燃料电池发动机或其工件处于负载悬浮状态的平衡按钮,用于控制待操作燃料电池发动机或其工件翻转的翻转按钮,用于控制抓取待操作燃料电池发动机或其工件的夹紧按钮。
24、进一步,所述翻转单元的旋转轴包括用于带动待操作燃料电池发动机或其工件水平旋转的水平旋转轴,以及用于带动待操作燃料电池发动机或其工件竖直旋转的竖直旋转轴。
25、进一步,所述操作手柄上还设有刹车旋钮,所述刹车旋钮顺时针转动为制动状态,此状态时,主臂、前臂不移动;所述刹车旋钮逆时针转动为解除制动状态。
26、与现有技术相比,本实用新型至少可实现如下有益效果之一:
27、1、可以应用于任意需要对燃料电池发动机及其工件操作的场合。相比现有技术燃料电池发动机只能在小车上翻转、移动的方式大大提高了装置应用的灵活性和场合。
28、2、夹爪部分可根据不同产品进行灵活拆卸和更换,有效降低生产换型损失,可以兼容不同规格的燃料电池发动机及其工件。
29、3、无需借助外部吊装设备实现产品上下,节省了使用成本。
30、4、动力方式可仅使用压缩空气,能满足燃料电池发动机升降、翻转等多自由度的独立运动方式。
31、5、通过设置无杆腔节流阀和有杆腔节流阀,可进行翻转速度调整。
32、6、在夹爪夹取产品过程中,具备安全互锁功能,防止由于误操作使夹爪松开;
33、7.借助配重及气路控制具备平衡助力功能,该模式下操作者可自由移动机械臂。
34、提供
技术实现要素:
部分是为了以简化的形式来介绍对概念的选择,它们在下文的具体实施方式中将被进一步描述。实用新型内容部分无意标识本公开的重要特征或必要特征,也无意限制本公开的范围。
技术特征:
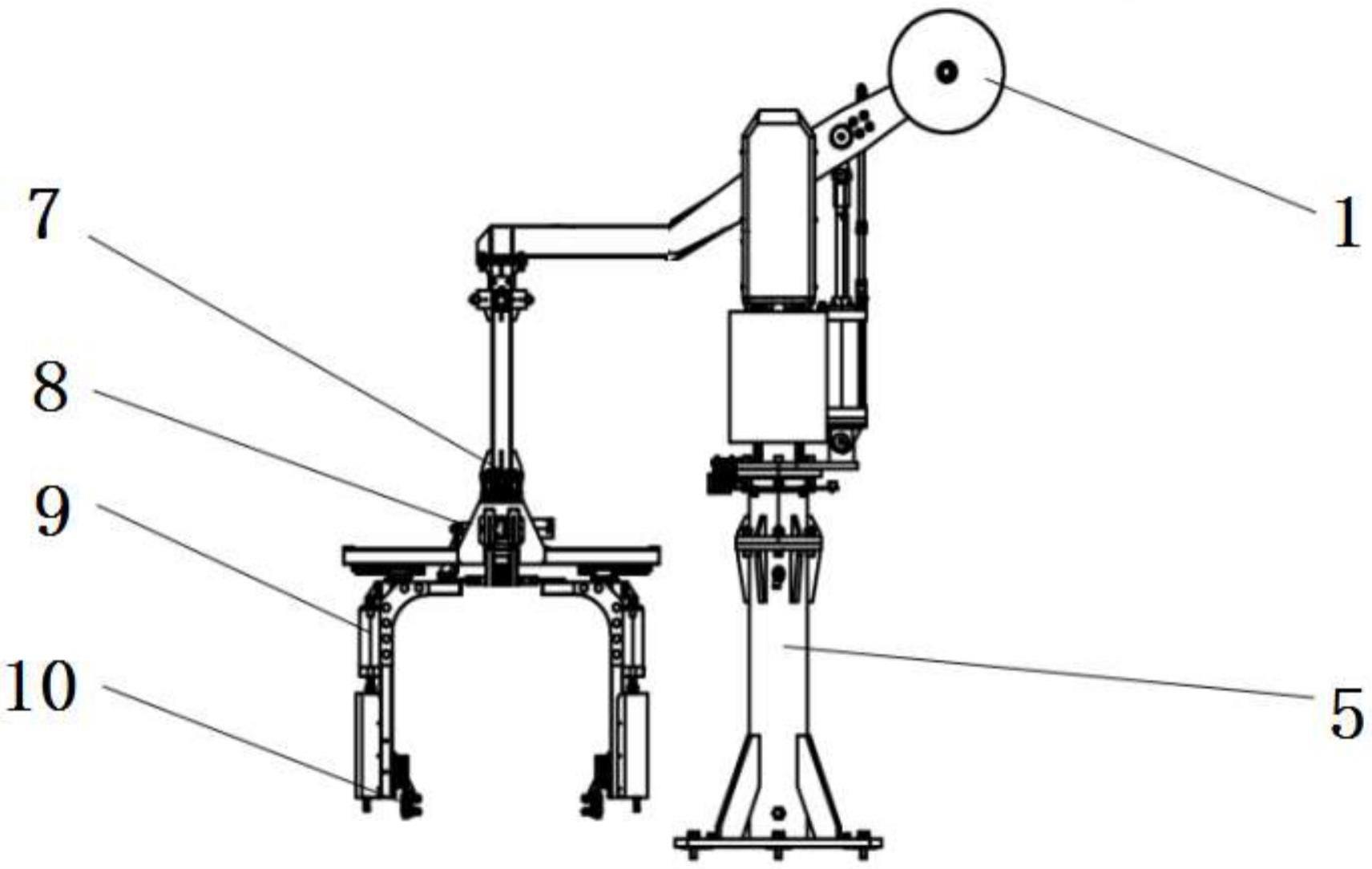
1.一种燃料电池发动机用机械手操作装置,其特征在于,包括立柱式支架(5)、设于立柱式支架(5)顶部一侧的配重机构(1),设于立柱式支架(5)顶部另一侧且依次连接的机械臂、翻转机构;其中,
2.根据权利要求1所述的燃料电池发动机用机械手操作装置,其特征在于,所述机械臂进一步包括主臂(2)、主臂驱动器、前臂(6)、前臂驱动器;其中,
3.根据权利要求1或2所述的燃料电池发动机用机械手操作装置,其特征在于,所述旋转机构进一步包括依次连接的运动挡块(15)、运动齿条(17)、夹爪齿轮(18);其中,
4.根据权利要求3所述的燃料电池发动机用机械手操作装置,其特征在于,所述翻转单元还包括用于调整翻转速度的无杆腔节流阀(12)、有杆腔节流阀(13);其中,
5.根据权利要求4所述的燃料电池发动机用机械手操作装置,其特征在于,所述抱持单元还包括用于对夹爪(10)进行锁死操作的安全互锁机构。
6.根据权利要求5所述的燃料电池发动机用机械手操作装置,其特征在于,还包括气源、缓冲气缸(3)、安装基座;并且,
7.根据权利要求6所述的燃料电池发动机用机械手操作装置,其特征在于,还包括用于接收到移动指令后向主臂驱动器、前臂驱动器发出相应移动控制信号以及接收到夹紧指令后控制气源向夹紧气缸(8)通气以及接收到翻转指令后控制气源向翻转气缸(9)通气的控制器(4);其中,
8.根据权利要求7所述的燃料电池发动机用机械手操作装置,其特征在于,所述控制器(4)具有用于与用户交互的操作手柄(11);其中,
9.根据权利要求4-7任一项所述的燃料电池发动机用机械手操作装置,其特征在于,所述翻转单元的旋转轴包括用于带动待操作燃料电池发动机或其工件水平旋转的水平旋转轴,以及用于带动待操作燃料电池发动机或其工件竖直旋转的竖直旋转轴。
10.根据权利要求8所述的燃料电池发动机用机械手操作装置,其特征在于,所述操作手柄(11)上还设有刹车旋钮,所述刹车旋钮顺时针转动为制动状态,此状态时,主臂(2)、前臂(6)不移动;所述刹车旋钮逆时针转动为解除制动状态。
技术总结
本技术提供了一种燃料电池发动机用机械手操作装置,属于燃料电池发动机技术领域,解决了现有技术无法灵活应用于各类场合且无法兼容不同规格产品的问题。该装置包括立柱式支架、设于立柱式支架顶部一侧的配重机构,设于立柱式支架顶部另一侧的机械臂、翻转机构。配重机构、主臂分别固定于同一旋转轴的两端,该旋转轴的旋转中心固定于立柱式支架顶部。配重机构上配置有可拆卸且与待操作工件质量相等的配重物。翻转机构包括万向铰接座、抱持单元、翻转单元。抱持单元包括夹紧气缸和由夹紧气缸驱动的夹爪,夹紧气缸通过万向铰接座固定于机械臂的移动端部。翻转单元包括旋转气缸和与待操作工件的壳体固定连接且由旋转气缸驱动的旋转机构。
技术研发人员:高江,谢建华,牟晓杰,邓旭东,张伯涛,张志伟
受保护的技术使用者:北京亿华通科技股份有限公司
技术研发日:20230105
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!