一种设有多重限位机构的机械取料夹爪
本技术涉及机械手设备,具体为一种设有多重限位机构的机械取料夹爪。
背景技术:
1、由于人力成本的增加,企业的使用成本也大大增加,面对激烈的竞争,企业不得不考虑削减人力成本,因此使用工业机器人代替人工成为了必然趋势,搬运机械手就是工业机器人的应用之一。
2、现有的机械爪夹为单一卡爪,在抓取搬运过程中容易使物料倾斜滑落,导致物料损坏,影响生产效率,并且有的机加工机械手中的机械手缺少缓冲装置,当机械爪抓取搬运工件时,机械爪的爪头部位在与工件接触时所产生的撞击力容易造成机械手臂本体或工件发生损坏。
技术实现思路
1、本实用新型的目的在于提供一种设有多重限位机构的机械取料夹爪,以解决上述背景技术中提出的现有的机械爪夹为单一卡爪易使物料倾斜滑落、爪头部位在与工件接触时所产生的撞击力容易发生损坏的问题。
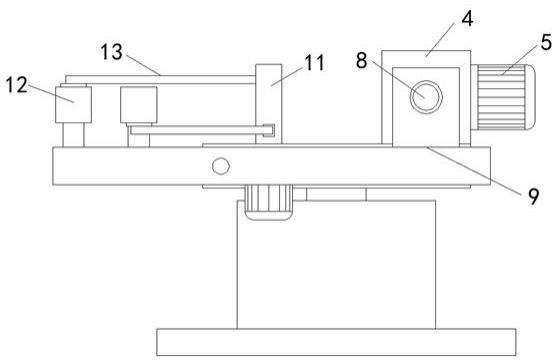
2、为实现上述目的,本实用新型提供如下技术方案:一种设有多重限位机构的机械取料夹爪,包括固定底板、驱动电机和滑板,所述固定底板的上表面固定有气缸,且气缸的输出端固定有支撑板,所述支撑板的上表面固定有防护架,且防护架的侧表面固定有驱动电机,所述驱动电机的输出端固定有第一齿轮,所述防护架空腔的内壁连接有第二齿轮,且第二齿轮的转轴固定有丝杆,所述丝杆的表面安装有滑板,所述滑板的下表面固定有夹持电机,且滑板的上表面连接有转动柱,并且夹持电机的输出端与转动柱的下端固定连接,所述滑板的上表面设置有夹持板,且夹持板与转动柱之间安装有连接臂,所述夹持板的表面贯穿安装有夹爪,且夹持板的侧表面安装有固定块。
3、优选的,所述防护架与第一齿轮构成转动连接,且防护架与第二齿轮构成转动连接,并且第一齿轮与第二齿轮构成啮合连接。
4、采用上述技术方案,通过第一齿轮的转动,使得第一齿轮通过啮合带动第二齿轮转动。
5、优选的,所述丝杆与防护架构成转动连接,且丝杆与滑板构成螺纹连接,并且滑板与支撑板构成滑动连接。
6、采用上述技术方案,第二齿轮转动后带动丝杆进行转动,使得丝杆通过螺纹带动滑板进行滑动。
7、优选的,所述转动柱与滑板构成转动连接,且滑板与夹持板构成转动连接,并且转动柱和夹持板分别与连接臂构成转动连接。
8、采用上述技术方案,滑板表面的转动柱转动,使得转动柱带动表面的连接臂转动,使得连接臂带动夹持板进行转动。
9、优选的,所述夹爪的侧表面均匀设置有弧形凸起,所述固定块与夹爪构成卡合连接。
10、采用上述技术方案,通过夹爪侧表面的弧形凸起提高对物品的夹持摩擦力,通过固定块对夹爪进行安装。
11、优选的,所述固定块与夹持板构成滑动连接,且固定块与夹持板之间连接有弹簧。
12、采用上述技术方案,通过滑动固定块使其压缩弹簧,使得固定块对夹爪与夹持板进行安装固定。
13、与现有技术相比,本实用新型的有益效果是:该设有多重限位机构的机械取料夹爪:
14、1.设置有夹持板与连接臂,使本装置通过夹持电机带动转动柱进行转动,使得转动柱带动侧表面的连接臂转动,连接臂带动2个夹持板进行转动,从而带动2个夹持板对物品进行夹持固定,提高了本装置在转运物品时的稳定性;
15、2.设置有夹爪与固定块,使本装置通过夹爪侧表面的弧形凸起提高本装置夹持时的摩擦力,并且通过固定块对夹爪进行安装固定,从而便于人员对夹爪进行更换,提高本装置的实用性;
16、3.设置有丝杆与滑板,使本装置通过第一齿轮的转动带动2个第二齿轮转动,最后第二齿轮带动丝杆转动从而带动滑板进行滑动,从而便于本装置对夹持物品的尺寸进行快速调整,提高了本装置对不同物品的适用性。
技术特征:
1.一种设有多重限位机构的机械取料夹爪,包括固定底板(1)、驱动电机(5)和滑板(9),其特征在于:所述固定底板(1)的上表面固定有气缸(2),且气缸(2)的输出端固定有支撑板(3),所述支撑板(3)的上表面固定有防护架(4),且防护架(4)的侧表面固定有驱动电机(5),所述驱动电机(5)的输出端固定有第一齿轮(6),所述防护架(4)空腔的内壁连接有第二齿轮(7),且第二齿轮(7)的转轴固定有丝杆(8),所述丝杆(8)的表面安装有滑板(9),所述滑板(9)的下表面固定有夹持电机(10),且滑板(9)的上表面连接有转动柱(11),并且夹持电机(10)的输出端与转动柱(11)的下端固定连接,所述滑板(9)的上表面设置有夹持板(12),且夹持板(12)与转动柱(11)之间安装有连接臂(13),所述夹持板(12)的表面贯穿安装有夹爪(14),且夹持板(12)的侧表面安装有固定块(15)。
2.根据权利要求1所述的一种设有多重限位机构的机械取料夹爪,其特征在于:所述防护架(4)与第一齿轮(6)构成转动连接,且防护架(4)与第二齿轮(7)构成转动连接,并且第一齿轮(6)与第二齿轮(7)构成啮合连接。
3.根据权利要求1所述的一种设有多重限位机构的机械取料夹爪,其特征在于:所述丝杆(8)与防护架(4)构成转动连接,且丝杆(8)与滑板(9)构成螺纹连接,并且滑板(9)与支撑板(3)构成滑动连接。
4.根据权利要求1所述的一种设有多重限位机构的机械取料夹爪,其特征在于:所述转动柱(11)与滑板(9)构成转动连接,且滑板(9)与夹持板(12)构成转动连接,并且转动柱(11)和夹持板(12)分别与连接臂(13)构成转动连接。
5.根据权利要求1所述的一种设有多重限位机构的机械取料夹爪,其特征在于:所述夹爪(14)的侧表面均匀设置有弧形凸起,所述固定块(15)与夹爪(14)构成卡合连接。
6.根据权利要求1所述的一种设有多重限位机构的机械取料夹爪,其特征在于:所述固定块(15)与夹持板(12)构成滑动连接,且固定块(15)与夹持板(12)之间连接有弹簧。
技术总结
本技术公开了一种设有多重限位机构的机械取料夹爪,包括固定底板、驱动电机和滑板,所述固定底板的上表面固定有气缸,且气缸的输出端固定有支撑板,所述支撑板的上表面固定有防护架,且防护架的侧表面固定有驱动电机,所述驱动电机的输出端固定有第一齿轮,所述防护架空腔的内壁连接有第二齿轮,且第二齿轮的转轴固定有丝杆,所述丝杆的表面安装有滑板。该设有多重限位机构的机械取料夹爪,设置有夹持板与连接臂,使本装置通过本装置通过夹持电机带动转动柱进行转动,使得转动柱带动侧表面的连接臂转动,连接臂带动2个夹持板进行转动,从而带动2个夹持板对物品进行夹持固定,提高了本装置在转运物品时的稳定性。
技术研发人员:马跃红,王东,张巍
受保护的技术使用者:鲁中职业学院(鲁中中等专业学校、鲁中高级技工学校)
技术研发日:20230109
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!