一种魔方机器人及魔方的制作方法
本技术涉及魔方,具体的涉及一种魔方机器人及魔方。
背景技术:
1、目前市面上魔方机器人的工作臂上的魔方配合爪的前端设置夹片,夹片呈片状,夹持于魔方中心块的四周的表面。夹片比较薄,在魔方机器人的魔方配合爪旋转工作时,夹片可能会和魔方中心块产生相对运动,出现打滑现象,导致魔方机器人性能不稳定,魔方机器人不能执行精准的旋转动作,严重时甚至无法旋转魔方的外层色块,用户使用体验差。
2、有鉴于此,特提出本实用新型。
技术实现思路
1、本实用新型提供一种魔方机器人及魔方。
2、本实用新型提供了以下技术方案:
3、本申请第一目的在于提供一种魔方机器人,包括:
4、底座;
5、多个工作臂,各所述工作臂均设置于所述底座上,各所述工作臂围合形成魔方容纳空间,所述工作臂包括壳体、旋转驱动机构和第一魔方配合爪,所述旋转驱动机构设置于所述壳体,所述第一魔方配合爪连接于所述旋转驱动机构,所述第一魔方配合爪具有多个插接体;
6、魔方机器人被配置为在中心块具有插槽的魔方装入所述魔方容纳空间的状态下,各所述第一魔方配合爪的插接体能分别插接于相应中心块的插槽内。
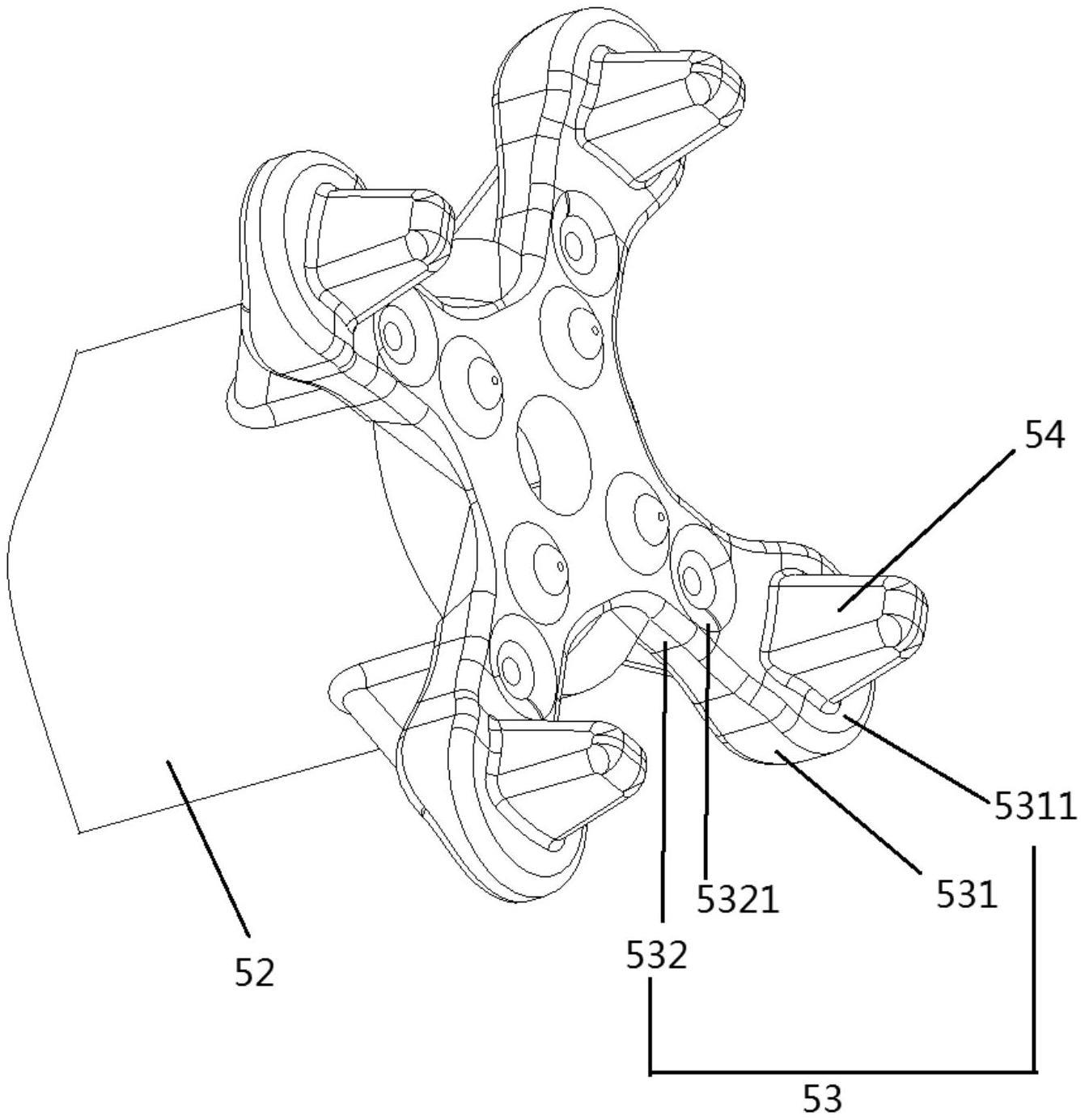
7、可选的,所述第一魔方配合爪包括柱体和多个连接座,所述柱体的一端连接于所述旋转驱动机构,各所述连接座设置于所述柱体的另一端,各所述连接座上分别设置有一所述插接体。
8、可选的,各所述连接座沿所述柱体的周向依次间隔设置;
9、各所述连接座均沿所述柱体的横截面半径方向延伸,各所述插接体分别设置于相应连接座的末端。
10、可选的,所述连接座包括宽片部和窄片部;
11、所述窄片部连接于所述柱体,所述宽片部连接于所述窄片部;
12、所述插接体设置于所述宽片部上。
13、可选的,所述宽片部背离所述壳体的一侧设置第一支撑面,所述窄片部背离所述壳体的一侧设置第二支撑面;
14、所述第一支撑面和所述壳体的距离大于所述第二支撑面和所述壳体的距离。
15、可选的,所述柱体上设置有多个加强筋,各所述加强筋分别连接相应的连接座。
16、可选的,所述加强筋呈直角三角状,所述加强筋的两个直角边分别连接所述柱体和相应的连接座。
17、可选的,魔方机器人在沿垂直所第一支撑面的方向上,在由靠近所述第一支撑面至远离所述第一支撑面的方向上,所述插接体的横截面面积逐渐减小。
18、可选的,魔方机器人还包括第二魔方配合爪,所述底座内设置底部旋转装置,所述第二魔方配合爪设置于所述底座上,且所述第二魔方配合爪位于各所述工作臂之间,所述第二魔方配合爪连接于所述底部旋转装置。
19、本申请第二目的在于提供一种魔方,包括:
20、上述所述魔方机器人配套使用的魔方,所述魔方的中心块上设置插槽。
21、通过采用上述技术方案,使得本实用新型具有以下有益效果:
22、本申请的魔方机器人的第一魔方配合爪具有插接体,魔方的中心块上具有插槽,插接体插接于相应中心块的插槽。魔方机器人工作时,第一魔方配合爪和魔方不会出现打滑现象,魔方机器人性能稳定,可以执行精准的旋转动作,使得魔方的外层色块可以旋转精准的角度。
23、下面结合附图对本实用新型的具体实施方式作进一步详细的描述。
技术特征:
1.一种魔方机器人,其特征在于,包括:
2.根据权利要求1所述的魔方机器人,其特征在于,所述第一魔方配合爪包括柱体和多个连接座,所述柱体的一端连接于所述旋转驱动机构,各所述连接座设置于所述柱体的另一端,各所述连接座上分别设置有一所述插接体。
3.根据权利要求2所述的魔方机器人,其特征在于,各所述连接座沿所述柱体的周向依次间隔设置;
4.根据权利要求3所述的魔方机器人,其特征在于,所述连接座包括宽片部和窄片部;
5.根据权利要求4所述的魔方机器人,其特征在于,所述宽片部背离所述壳体的一侧设置第一支撑面,所述窄片部背离所述壳体的一侧设置第二支撑面;
6.根据权利要求2所述的魔方机器人,其特征在于,所述柱体上设置有多个加强筋,各所述加强筋分别连接相应的连接座。
7.根据权利要求6所述的魔方机器人,其特征在于,所述加强筋呈直角三角状,所述加强筋的两个直角边分别连接所述柱体和相应的连接座。
8.根据权利要求5所述的魔方机器人,其特征在于,在沿垂直所述第一支撑面的方向上,在由靠近所述第一支撑面至远离所述第一支撑面的方向上,所述插接体的横截面面积逐渐减小。
9.根据权利要求1所述的魔方机器人,其特征在于,还包括第二魔方配合爪,所述底座内设置底部旋转装置,所述第二魔方配合爪设置于所述底座上,且所述第二魔方配合爪位于各所述工作臂之间,所述第二魔方配合爪连接于所述底部旋转装置。
10.一种和上述权利要求1-9任一所述魔方机器人配套使用的魔方,其特征在于,所述魔方的中心块上设置插槽。
技术总结
本技术公开一种魔方机器人及魔方,魔方机器人包括底座和多个工作臂。各所述工作臂均设置于所述底座上,各所述工作臂围合形成魔方容纳空间,所述工作臂包括壳体、旋转驱动机构和第一魔方配合爪,所述旋转驱动机构设置于所述壳体,所述第一魔方配合爪连接于所述旋转驱动机构,所述第一魔方配合爪具有多个插接体。本申请的魔方机器人的第一魔方配合爪具有插接体,魔方的中心块上具有插槽,插接体插接于相应中心块的插槽。魔方机器人工作时,第一魔方配合爪和魔方不会出现打滑现象,魔方机器人性能稳定,可以执行精准的旋转动作,使得魔方的外层色块可以旋转精准的角度。
技术研发人员:陈永煌
受保护的技术使用者:汕头市澄海区魔域文化有限公司
技术研发日:20230106
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!