一种桁架机器人用可伸缩悬臂梁机构的制作方法
本技术涉及悬臂梁机构,特别是一种桁架机器人用可伸缩悬臂梁机构。
背景技术:
1、桁架机器人属于直角坐标机器人。它是一种基于直角x、y、z坐标系的全自动工业设备,可以调整工件的位置或实现工件的轨迹运动。桁架机器人它可以携带物体和操作工具完成各种操作,其结构包括控制运动的悬臂梁,以及抓取物品的抓起构件。
2、如公开号为cn210850259u的一种桁架机器人用悬臂梁机构,其结构包括横梁与滑动设置于所述横梁上的竖梁。所述竖梁上的端部安装有夹具,其中的横梁与竖梁均属于悬臂梁结构中的组件。
3、上述桁架机器人用悬臂梁机构还存在以下不足:在使用桁架机器人进行物品的抓取转运作业时,一般是通过竖梁上的升降机构来实现物品的升降的,但是在一些较高的厂房中进行作业时,这样的一级升降有时无法满足升降高度的要求,伸缩长度具有一定的限制,不便于物品的提升,因此需要一种桁架机器人用可伸缩悬臂梁机构来解决上述问题。
技术实现思路
1、本实用新型的目的旨在至少解决所述技术缺陷之一。
2、为此,本实用新型的一个目的在于提出一种桁架机器人用可伸缩悬臂梁机构,以解决背景技术中所提到的问题,克服现有技术中存在的不足。
3、为了实现上述目的,本实用新型一方面的实施例提供一种桁架机器人用可伸缩悬臂梁机构,包括抓取装置安装板,所述抓取装置安装板的一侧固定连接有一级升降机构,所述一级升降机构的一侧滑动连接有悬臂梁机构,所述悬臂梁机构的一侧设置有二级升降机构,所述二级升降机构包括底板,所述底板的一侧固定连接有支撑框,所述底板的一侧固定连接有气缸,所述气缸的一侧固定连接有升降柱,所述升降柱的侧面固定连接有卡板,所述升降柱的顶面固定连接有升降板,所述升降板的一侧固定连接有限位柱。
4、由上述任一方案优选的是,所述抓取装置安装板的一侧开设有安装孔,所述安装孔的数量为若干个,若干个所述安装孔线性阵列在抓取装置安装板的一侧。所述底板的一侧开设有锁地孔,所述锁地孔的数量为若干个,若干个所述锁地孔均匀分布在底板的四个角上,采用上述方案可以达到的技术效果是:当需要进行物品的转运时,首先需要将底板通过锁地孔安装在使用位置,随后将抓取装置通过安装孔安装到抓取机构安装板上,通过一级升降机构和悬臂梁机构可以物品进行转运。
5、由上述任一方案优选的是,所述气缸的底座与底板固定连接,所述气缸的输出端与升降柱固定连接。所述支撑框的一侧开设有卡槽,所述卡槽的数量为两个,两个所述卡槽对称分布在支撑框的一侧,所述卡槽的形状与大小和卡板的形状与大小相适配,所述升降板与悬臂梁机构固定连接,采用上述方案可以达到的技术效果是:当厂房的高度较高时,而且一级升降机构的无法满足物品升降高度的要求时,开启气缸使其带动升降柱进行升降,升降柱升降时可以通过升降板带动悬臂梁机构进行升降,可以实现二级升降的目的,可以进一步提高升降高度的限制,可以桁架机器人可以使用各种高度的厂房,更加便于物品的转运。
6、由上述任一方案优选的是,所述支撑框的一侧开设有限位孔,所述限位孔的直径大小与限位柱的直径大小相等。所述升降板的底面固定连接有防撞柱,所述防撞柱的数量为两个,两个所述防撞柱对称分布在升降板的一侧,采用上述方案可以达到的技术效果是:通过限位柱的设置,可以对升降板进行限位,使其运动的更加稳定,通过防撞柱的设置,可以防止升降板与支撑框之间发生刚性碰撞,可以起到防护的目的。
7、与现有技术相比,本实用新型所具有的优点和有益效果为:
8、通过抓取装置安装板、一级升降机构、悬臂梁机构和二级升降机构之间的配合设置,当需要进行物品的转运时,首先需要将底板通过锁地孔安装在使用位置,随后将抓取装置通过安装孔安装到抓取机构安装板上,通过一级升降机构和悬臂梁机构可以物品进行转运,当厂房的高度较高时,而且一级升降机构的无法满足物品升降高度的要求时,开启气缸使其带动升降柱进行升降,升降柱升降时可以通过升降板带动悬臂梁机构进行升降,可以实现二级升降的目的,可以进一步提高升降高度的限制,可以桁架机器人可以使用各种高度的厂房,更加便于物品的转运。
技术特征:
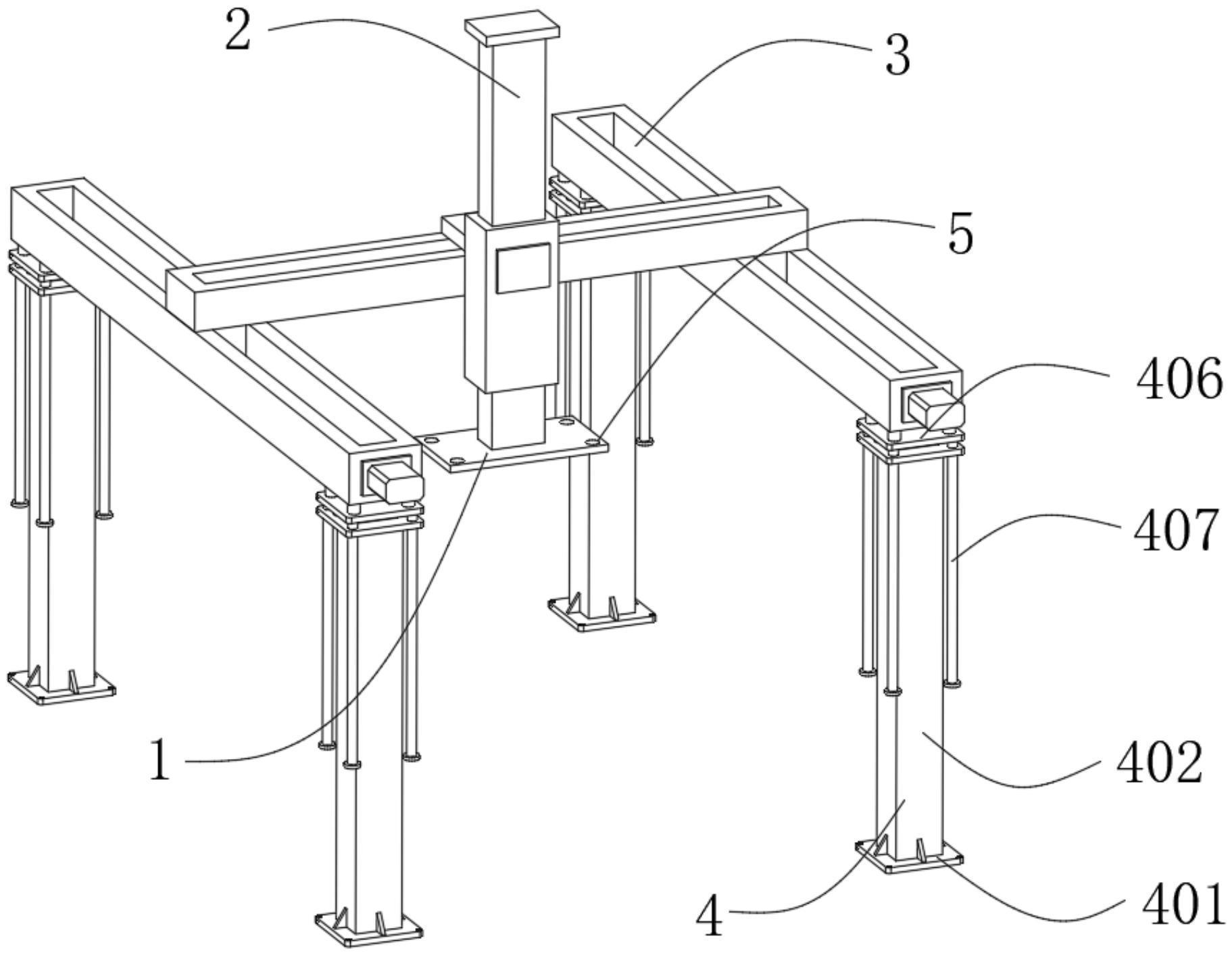
1.一种桁架机器人用可伸缩悬臂梁机构,其特征在于:包括抓取装置安装板(1),所述抓取装置安装板(1)的一侧固定连接有一级升降机构(2),所述一级升降机构(2)的一侧滑动连接有悬臂梁机构(3),所述悬臂梁机构(3)的一侧设置有二级升降机构(4),所述二级升降机构(4)包括底板(401),所述底板(401)的一侧固定连接有支撑框(402),所述底板(401)的一侧固定连接有气缸(403),所述气缸(403)的一侧固定连接有升降柱(404),所述升降柱(404)的侧面固定连接有卡板(405),所述升降柱(404)的顶面固定连接有升降板(406),所述升降板(406)的一侧固定连接有限位柱(407)。
2.根据权利要求1所述的一种桁架机器人用可伸缩悬臂梁机构,其特征在于:所述抓取装置安装板(1)的一侧开设有安装孔(5),所述安装孔(5)的数量为若干个,若干个所述安装孔(5)线性阵列在抓取装置安装板(1)的一侧。
3.根据权利要求2所述的一种桁架机器人用可伸缩悬臂梁机构,其特征在于:所述底板(401)的一侧开设有锁地孔(6),所述锁地孔(6)的数量为若干个,若干个所述锁地孔(6)均匀分布在底板(401)的四个角上。
4.根据权利要求3所述的一种桁架机器人用可伸缩悬臂梁机构,其特征在于:所述气缸(403)的底座与底板(401)固定连接,所述气缸(403)的输出端与升降柱(404)固定连接。
5.根据权利要求4所述的一种桁架机器人用可伸缩悬臂梁机构,其特征在于:所述支撑框(402)的一侧开设有卡槽(7),所述卡槽(7)的数量为两个,两个所述卡槽(7)对称分布在支撑框(402)的一侧,所述卡槽(7)的形状与大小和卡板(405)的形状与大小相适配,所述升降板(406)与悬臂梁机构(3)固定连接。
6.根据权利要求5所述的一种桁架机器人用可伸缩悬臂梁机构,其特征在于:所述支撑框(402)的一侧开设有限位孔(8),所述限位孔(8)的直径大小与限位柱(407)的直径大小相等。
7.根据权利要求6所述的一种桁架机器人用可伸缩悬臂梁机构,其特征在于:所述升降板(406)的底面固定连接有防撞柱(9),所述防撞柱(9)的数量为两个,两个所述防撞柱(9)对称分布在升降板(406)的一侧。
技术总结
本技术涉及悬臂梁机构技术领域,特别是一种桁架机器人用可伸缩悬臂梁机构,包括抓取装置安装板,所述抓取装置安装板的一侧固定连接有一级升降机构,所述一级升降机构的一侧滑动连接有悬臂梁机构。本技术的优点在于:需要将底板通过锁地孔安装在使用位置,随后将抓取装置通过安装孔安装到抓取机构安装板上,通过一级升降机构和悬臂梁机构可以物品进行转运,一级升降机构的无法满足物品升降高度的要求时,开启气缸使其带动升降柱进行升降,升降柱升降时可以通过升降板带动悬臂梁机构进行升降,可以实现二级升降的目的,可以进一步提高升降高度的限制,可以桁架机器人可以使用各种高度的厂房,更加便于物品的转运。
技术研发人员:黄俊凯,陈燮尧
受保护的技术使用者:广州市第七轴机器人设备有限公司
技术研发日:20230130
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!