一种便于组装的悬挂式温室喷雾机器人的制作方法
本技术涉及喷雾机器人,具体为一种便于组装的悬挂式温室喷雾机器人。
背景技术:
1、机器人是多关节机械手或多自由度的机器装置,它能自动执行工作,是靠自身动力和控制能力来实现各种功能的一种机器。
2、现有的陪护机器人一般都是与底座一体成型,因此不便于其安装与拆卸,从而不便使用者组装,鉴于此,提出一种便于组装的悬挂式温室喷雾机器人以解决上述问题。
技术实现思路
1、针对现有技术的不足,本实用新型提供了一种便于组装的悬挂式温室喷雾机器人,具备便于喷雾机器人底座进行拆卸等优点,解决了传统喷雾机器人不便于对底座进行拆卸的问题。
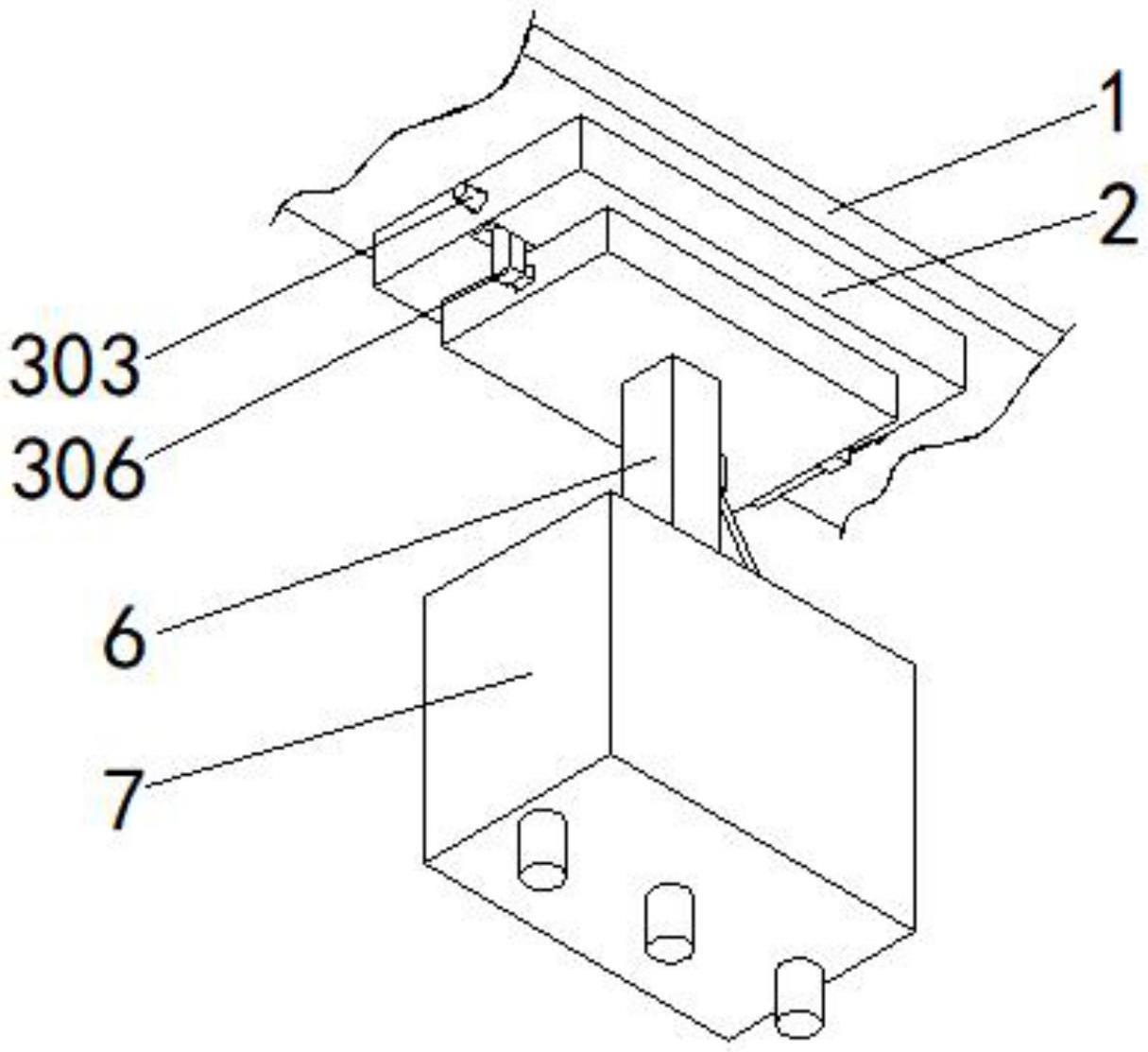
2、为实现上述目的,本实用新型提供如下技术方案:一种便于组装的悬挂式温室喷雾机器人,包括安装板,所述安装板的下表面固定有固定板,所述固定板的左右两侧均开设有固定槽,所述固定板上设有安装机构,所述固定板下方贴合有底板,所述底板下方固定有固定柱,所述固定柱下端铰接有连接柱,所述连接柱下端固定有喷雾机器人本体,所述固定柱上设有调节组件;
3、所述安装机构包括弹簧、移动块、移动杆、把手、移动口、卡栓和卡槽两个所述固定槽内腔相背一侧壁固定有弹簧,左右两侧所述弹簧相背的一侧均固定有移动块,左右两侧所述移动块相背的一侧均固定有移动杆,左右两侧所述移动杆相背的一侧均固定有把手,所述固定板下表面的左右两侧均开设有移动口,左右两侧所述移动杆的下表面均固定有卡栓,所述底板的左右两侧均开设有卡槽。
4、进一步,所述把手的外侧固定有防滑套,所述防滑套为橡胶套。
5、进一步,所述移动块在固定槽的内部做左右线性移动,所述固定槽与移动口连通。
6、进一步,所述移动块与固定槽滑动连接。
7、进一步,所述卡栓位于卡槽内部,且卡栓与卡槽相抵接。
8、进一步,所述调节组件包括固定块和电动推杆,所述固定块铰接在固定柱上,所述固定块的下端固定有电动推杆,所述电动推杆的输出端与喷雾机器人本体相铰接。
9、与现有技术相比,本申请的技术方案具备以下有益效果:
10、1、该便于组装的悬挂式温室喷雾机器人,通过设有安装机构,当需要对喷雾机器人进行拆卸维修时,可通过安装机构对底座进行快速拆卸,从而对喷雾机器人进行拆卸,便于操作。
11、2、该便于组装的悬挂式温室喷雾机器人,通过设有调节机构,当需要不同角度喷雾时,可通过调节机构调节喷雾机器人角度,使其喷雾范围更大,适用性高。
技术特征:
1.一种便于组装的悬挂式温室喷雾机器人,包括安装板(1),其特征在于:所述安装板(1)的下表面固定有固定板(2),所述固定板(2)的左右两侧均开设有固定槽(4),所述固定板(2)上设有安装机构(3),所述固定板(2)下方贴合有底板(5),所述底板(5)下方固定有固定柱(6),所述固定柱(6)下端铰接有连接柱(9),所述连接柱(9)下端固定有喷雾机器人本体(7),所述固定柱(6)上设有调节组件(8);
2.根据权利要求1所述的一种便于组装的悬挂式温室喷雾机器人,其特征在于:所述把手(304)的外侧固定有防滑套,所述防滑套为橡胶套。
3.根据权利要求1所述的一种便于组装的悬挂式温室喷雾机器人,其特征在于:所述移动块(302)在固定槽(4)的内部做左右线性移动,所述固定槽(4)与移动口(305)连通。
4.根据权利要求1所述的一种便于组装的悬挂式温室喷雾机器人,其特征在于:所述移动块(302)与固定槽(4)滑动连接。
5.根据权利要求1所述的一种便于组装的悬挂式温室喷雾机器人,其特征在于:所述卡栓(306)位于卡槽(307)内部,且卡栓(306)与卡槽(307)相抵接。
6.根据权利要求1所述的一种便于组装的悬挂式温室喷雾机器人,其特征在于:所述调节组件(8)包括固定块(801)和电动推杆(802),所述固定块(801)铰接在固定柱(6)上,所述固定块(801)的下端固定有电动推杆(802),所述电动推杆(802)的输出端与喷雾机器人本体(7)相铰接。
技术总结
本技术涉及一种便于组装的悬挂式温室喷雾机器人,包括安装板,所述安装板的下表面固定有固定板,所述固定板的左右两侧均开设有固定槽,所述固定板上设有安装机构,所述固定板下方贴合有底板,所述底板下方固定有固定柱,所述固定柱下端铰接有连接柱,所述连接柱下端固定有喷雾机器人本体,所述固定柱上设有调节组件,所述安装机构包括弹簧、移动块、移动杆、把手、移动口、卡栓和卡槽两个所述固定槽内腔相背一侧壁固定有弹簧。该便于组装的悬挂式温室喷雾机器人通过设有安装机构,当需要对喷雾机器人进行拆卸维修时,可通过安装机构对底座进行快速拆卸,从而对喷雾机器人进行拆卸,便于操作。
技术研发人员:李兴锋,李怡晨,鲁仪增
受保护的技术使用者:济南千木奇农业生态园有限公司
技术研发日:20230207
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!