一种机械手手爪的制作方法
本技术属于机床,涉及一种机械手手爪。
背景技术:
1、随着自动化加工的发展,工件的上下料、运输和堆垛往往通过机器人进行。机器人上安装机械手手爪,通过机械手手爪来抓取夹持工件。
2、如中国专利文献资料公开的一种智能夹持棒料机构[申请号:cn201821548862.8;公告号:cn208841003u]:包括机器人、机械夹爪a、气缸、支撑架、视觉系统、机械夹爪b和移动导轨。机器人为六轴联动机器人,各轴之间通过电气线路和机械连接部件进行连接。支撑架安装于机器人前端,支撑架通过安装螺丝紧固连接在机器人上。机械夹爪a、机械夹爪b和支撑架组成了机械手手爪。上料时,机械夹爪a和机械夹爪b夹取工件,然后机器人移动将工件输送到机床中,机床上的夹具夹住工件后,机械夹爪a和机械夹爪b松开工件,机器人将机械夹爪a和机械夹爪b移出机床;下料时,机器人将机械夹爪a和机械夹爪b移入到机床中,机械夹爪a和机械夹爪b夹住工件,机床上的夹具松开工件后,机器人将机械夹爪a、机械夹爪b和工件移出机床。
3、在机械加工中,往往会产生切屑,这些切屑容易在机械手手爪于机床中上下料时黏附到机械手手爪上,当切屑黏附在机械夹爪a和机械夹爪b的指垫处时,在机械手手爪抓取工件时会在工件的表面上留下切屑印痕,从而导致工件变为不良品,使工件加工的合格率降低。
技术实现思路
1、本实用新型的目的是针对现有技术存在的上述问题,提出了一种机械手手爪,解决了现有机械手手爪黏附切屑后导致工件加工合格率下降的技术问题。
2、本实用新型的目的可通过下列技术方案来实现:
3、一种机械手手爪,包括支撑架,所述支撑架上安装有夹爪,所述夹爪具有用于夹持工件的数个手指,每个手指上均固定有指垫,其特征在于,每个手指上均固定有用于与气源连通的接头,每个指垫上均开设有呈v形的夹持槽,所述夹持槽的底面上开设有出气孔,每个手指中均开设有连通接头与出气孔的通气通道。
4、工件夹持在数个手指的指垫之间,即工件与指垫夹持槽的侧面接触。在机械手手爪夹持工件之前,气源通过接头、通气通道和出气孔向夹持槽吹气,从而减少切屑在夹持槽槽壁面上的黏附,也就能够减少因切屑黏附在指垫上导致的工件表面出现印痕的情况,减少不良品的出现,提高工件加工的合格率。而且由于出气孔设置在夹持槽的底面上,当出气孔出气时,气体可以从夹持槽的底面吹向夹持槽的侧面,从而可以将夹持槽的槽壁面吹干净,有利于减少工件表面出现的切屑印痕,即有利于提高工件加工的合格率。同时由于每个指垫均具有呈v形的夹持槽,这样每个指垫在夹持圆柱状的工件时能够形成两个夹持面,提高了工件夹持的稳定性。
5、在上述的机械手手爪中,每个指垫上均开设有两个出气孔。这样可以提高吹气量,从而更充分地去除夹持槽槽壁面上的切屑,有利于提高产品加工的合格率。
6、在上述的机械手手爪中,每个手指上均固定有管夹,位于同一手指上的管夹和接头固定在手指的同一侧面上。接头与气源之间连接气管,通过管夹可以将气管稳定的固定在手指上,从而使气管能够随夹爪一起移动,使接头与气管之间连接稳定。
7、在上述的机械手手爪中,每个指垫均通过固定螺栓可拆卸的固定连接在手指上,所述固定螺栓的杆部穿过手指后与指垫螺纹连接,每个手指上均设置有两个固定螺栓且两个固定螺栓分别位于夹持槽的两侧。这样可以根据工件的尺寸大小更换更合适的指垫,使工件夹持稳定。两个固定螺栓分别位于夹持槽的两侧使指垫在手指上形成两个固定点,固定稳定,而且固定螺栓拆装方便,使指垫的更换方便。
8、在上述的机械手手爪中,每个手指固定指垫的侧面上均具有定位面和定位凸肩,所述指垫上背向夹持槽的侧面贴靠在定位面上,且指垫靠近支撑架的一端抵靠在定位凸肩上。通过定位面和定位凸肩对指垫的安装进行定位,使指垫在手指上安装方便且固定稳定。
9、在上述的机械手手爪中,所述定位面与指垫背向夹持槽的侧面之间固定有密封垫,所述通气通道和出气孔通过密封垫的内孔连通。密封垫具有密封作用,可以避免气体从定位面与指垫之间的缝隙处泄漏,从而保证气体均从出气孔吹出对夹持槽的槽壁面进行清洁,有利于提高工件加工的合格率。
10、在上述的机械手手爪中,所述支撑架包括呈筒状的支撑筒,所述支撑筒的一端上固定有支撑板,所述夹爪固定连接在支撑板上,所述支撑筒的另一端上固定有连接架。通过连接架能够将整个机械手手爪连接到机器人上,使机械手手爪安装方便,而且连接架与夹爪分别位于支撑筒的两端,减少了夹爪与机器人之间的干涉,使机械手手爪工作稳定。
11、在上述的机械手手爪中,所述支撑板上固定有两个并排的夹爪,且每个夹爪均具有两个相对设置的手指。两个夹爪可以更稳定的夹持呈棒状的工件。
12、与现有技术相比,本实用新型具有以下优点:
13、在指垫上开设出气孔,且出气孔位于夹持槽的底面上,通过吹气可以去除夹持槽槽壁面上的切屑,减少了切屑黏附在指垫上造成的工件表面切屑印痕,提高了工件加工的合格率。而且指垫与手指为可拆结构,方便了指垫的更换。
技术特征:
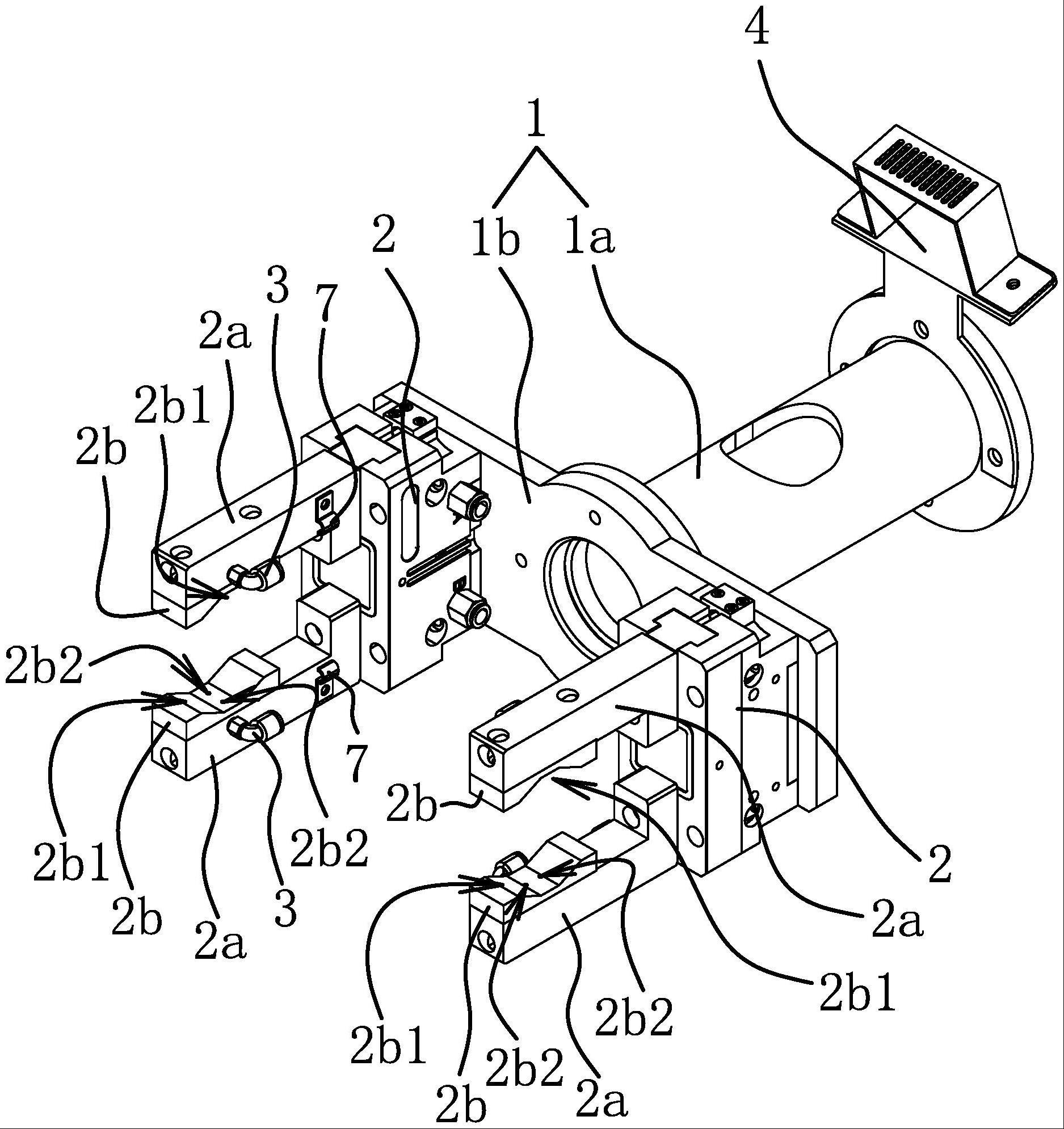
1.一种机械手手爪,包括支撑架(1),所述支撑架(1)上安装有夹爪(2),所述夹爪(2)具有用于夹持工件的数个手指(2a),每个手指(2a)上均固定有指垫(2b),其特征在于,每个手指(2a)上均固定有用于与气源连通的接头(3),每个指垫(2b)上均开设有呈v形的夹持槽(2b1),所述夹持槽(2b1)的底面上开设有出气孔(2b2),每个手指(2a)中均开设有连通接头(3)与出气孔(2b2)的通气通道(2a1)。
2.根据权利要求1所述的机械手手爪,其特征在于,每个指垫(2b)上均开设有两个出气孔(2b2)。
3.根据权利要求1所述的机械手手爪,其特征在于,每个手指(2a)上均固定有管夹(7),位于同一手指(2a)上的管夹(7)和接头(3)固定在手指(2a)的同一侧面上。
4.根据权利要求1或2或3所述的机械手手爪,其特征在于,每个指垫(2b)均通过固定螺栓(5)可拆卸的固定连接在手指(2a)上,所述固定螺栓(5)的杆部穿过手指(2a)后与指垫(2b)螺纹连接,每个手指(2a)上均设置有两个固定螺栓(5)且两个固定螺栓(5)分别位于夹持槽(2b1)的两侧。
5.根据权利要求4所述的机械手手爪,其特征在于,每个手指(2a)固定指垫(2b)的侧面上均具有定位面(2a2)和定位凸肩(2a3),所述指垫(2b)上背向夹持槽(2b1)的侧面贴靠在定位面(2a2)上,且指垫(2b)靠近支撑架(1)的一端抵靠在定位凸肩(2a3)上。
6.根据权利要求5所述的机械手手爪,其特征在于,所述定位面(2a2)与指垫(2b)背向夹持槽(2b1)的侧面之间固定有密封垫(6),所述通气通道(2a1)和出气孔(2b2)通过密封垫(6)的内孔连通。
7.根据权利要求1或2或3所述的机械手手爪,其特征在于,所述支撑架(1)包括呈筒状的支撑筒(1a),所述支撑筒(1a)的一端上固定有支撑板(1b),所述夹爪(2)固定连接在支撑板(1b)上,所述支撑筒(1a)的另一端上固定有连接架(4)。
8.根据权利要求7所述的机械手手爪,其特征在于,所述支撑板(1b)上固定有两个并排的夹爪(2),且每个夹爪(2)均具有两个相对设置的手指(2a)。
技术总结
本技术提供了一种机械手手爪,属于机床技术领域。它解决了现有机械手手爪黏附切屑后导致工件加工合格率下降等问题。本机械手手爪,包括支撑架,支撑架上安装有夹爪,夹爪具有用于夹持工件的数个手指,每个手指上均固定有指垫,每个手指上均固定有用于与气源连通的接头,每个指垫上均开设有呈V形的夹持槽,夹持槽的底面上开设有出气孔,每个手指中均开设有连通接头与出气孔的通气通道。本机械手手爪提高了工件加工的合格率。
技术研发人员:郑安军,蒋利军,高兆春,姬志恒,张立欣,李宝鹏,陈飞峰
受保护的技术使用者:海德曼(上海)自动化技术有限公司
技术研发日:20230114
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!