一种表演机器人的制作方法
本申请涉及机械制造的,尤其是涉及一种表演机器人。
背景技术:
1、表演机器人是近年来热门的一项技术,表演机器人的表演也逐渐应用于游乐场中,而大型的表演机器人肢体协调不够灵活、动作单一僵硬,而且需要多个电机来驱动各个部位的行动,结构复杂、成本较高,因此需要设计一款结构简单,生动逼真的表演机器人。
技术实现思路
1、本申请所要解决的技术问题是现有的表演机器人的表演动作较为单一。
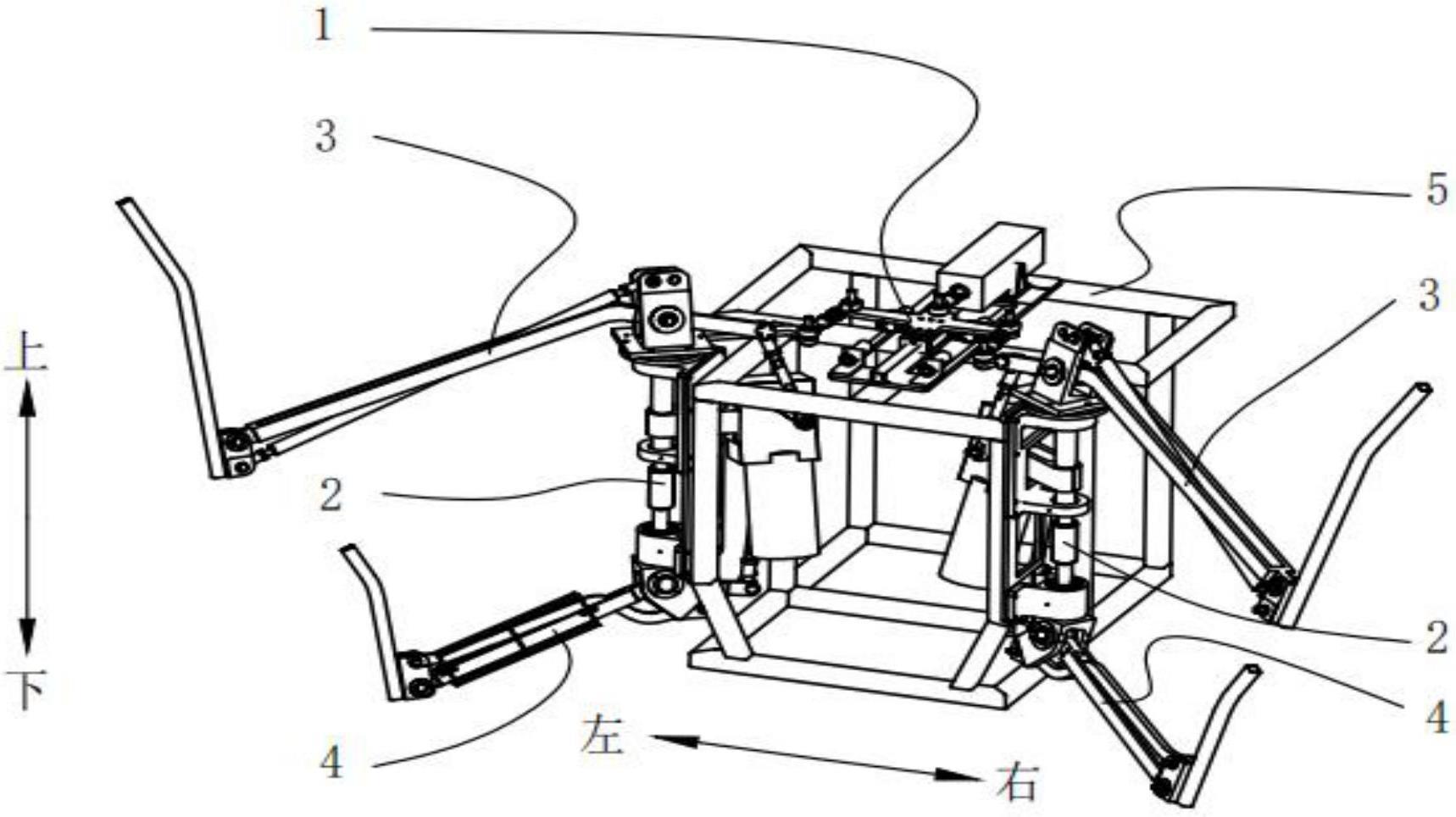
2、为了解决上述问题,本申请提供了一种表演机器人,包括胸部组件、驱动组件、上爪组件、下爪组件和机架,所述胸部组件与所述机架固定连接,所述驱动组件与所述机架固定连接,所述驱动组件的上端与所述上爪组件固定连接,所述驱动组件的下端与所述下爪组件固定连接,所述驱动组件、所述上爪组件和所述下爪组件均以机架的垂直中轴线为对称轴对称设置。
3、所述机架安装有连接板,所述连接板以机架为对称轴对称设置。
4、所述驱动组件包括第一曲柄摇杆机构、第二曲柄摇杆机构、转轴,所述转轴安装于所述连接板上,所述转轴的上方与所述第一曲柄摇杆机构固定连接,所述转轴的下方与所述第二曲柄摇杆机构固定连接。
5、所述上爪组件包括肩座和第一摆臂,所述第一摆臂与所述肩座转动连接并且第一摆臂穿过肩座,所述肩座与所述转轴的上端固定连接,所述第一摆臂与所述第一曲柄摇杆机构转动连接。
6、所述下爪组件包括轴承座和第二摆臂,所述轴承座与所述转轴固定连接,所述第二摆臂与所述第二曲柄摇杆机构转动连接。
7、优选的,所述胸部组件包括气缸、滑块、转接板、连杆、滑轨和至少四个液压缓冲器,所述气缸的前端与所述转接板固定连接,所述滑块安装于所述转接板的下方,所述转接板的左右两端与所述连杆固定连接;所述滑轨设置在所述滑块的下方并且所述滑轨的长度方向与所述滑块的运动方向一致,所述液压缓冲器安装在所述滑轨的首端的左右两侧和/或所述滑轨的末端的左右两侧。
8、优选的,所述驱动组件还包括机座、电机和轴承部件,所述转轴的中部套设于所述机座,所述电机与所述机座的一侧固定连接,所述第一曲柄摇杆机构的端部套设于所述电机的一侧的输出轴并可沿所述输出轴进行旋转,所述第二曲柄摇杆机构的端部套设于所述电机的另一侧的输出轴并可沿所述输出轴进行旋转;所述轴承部件套设于所述转轴并且与所述连接板固定连接。
9、其中,所述第一曲柄摇杆机构包括上曲柄、上摇杆和摇臂,所述上曲柄设置在所述第一曲柄摇杆机构的端部,所述上曲柄的另一端与所述上摇杆的一端固定连接,所述上摇杆的另一端与所述上爪组件连接,所述摇臂的一端与同侧对应的所述连杆连接,所述摇臂的另一端与所述转轴的上方固定连接。
10、其中,所述第二曲柄摇杆机构包括下曲柄和下摇杆,所述下曲柄设置在所述第二曲柄摇杆机构的端部,所述下曲柄的另一端与所述下摇杆的一端固定连接,所述第二摆臂的一端与同侧对应的所述连杆和所述下摇杆的另一端连接,所述第二摆臂的另一端与所述转轴的下方固定连接。
11、其中,所述转轴包括万向节、上转轴和下转轴,所述上转轴的下方与所述万向节的上方连接,所述下转轴的上方与所述万向节的下方连接。
12、其中,所述机架设有耳座,所述耳座以所述气缸为对称轴安装在所述气缸的左右两侧并且与所述气缸转动连接。
13、优选的,所述上爪组件还包括第一关节、第二关节和长连杆,所述第一关节的一端与所述第二关节的一端活动连接,所述第二关节的另一端与所述第一摆臂固定连接并且与所述肩座活动连接,所述长连杆的一端与所述第一关节的一端固定连接,所述长连杆的另一端与所述肩座固定连接。
14、优选的,所述下爪组件还包括第三关节、第四关节和曲连杆,所述第三关节的一端与所述第四关节的一端活动连接,所述第四关节的另一端与所述第二摆臂固定连接并且与所述轴承座活动连接,所述曲连杆的一端与所述第三关节的一端固定连接,所述曲连杆的另一端与所述轴承座固定连接。
15、与现有技术相比,本申请提供的技术方法能够产生以下有益技术效果:
16、表演机器人正常启动时,所述胸部组件驱动所述驱动组件,所述驱动组件带动上爪组件和下爪组件进行张合运动。所述电机随着所述机座的转动而转动,确保所述电机的输出轴的旋转面与爪子的运动方向平行。所述电机为空心轴电机,所述电机的一侧的输出端控制第一曲柄摇杆机构的运动,所述电机的另一侧的输出端控制第二曲柄摇杆机构的运动。所述电机的转动带动所述第一曲柄摇杆机构转动,由于所述第一摆臂与所述第一曲柄摇杆机构转动连接,所述第一摆臂随之上下摆动,即上爪组件上下摆动;所述电机的转动带动所述第二曲柄摇杆机构转动,由于所述第二摆臂与所述第二曲柄摇杆机构转动连接,所述第二摆臂随之上下摆动,即下爪组件上下摆动。所述电机能够驱动上爪组件和下爪组件两个组件,实现一个电机控制同侧爪子在空间上错位协调运动。表演机器人解决了现有表演机器人的表演动作单一的问题,同时降低了机器人的控制难度和生产成本。
技术特征:
1.一种表演机器人,其特征在于,包括胸部组件、驱动组件、上爪组件、下爪组件和机架,所述胸部组件与所述机架固定连接,所述驱动组件与所述机架固定连接,所述驱动组件的上端与所述上爪组件固定连接,所述驱动组件的下端与所述下爪组件固定连接,所述驱动组件、所述上爪组件和所述下爪组件均以所述机架的垂直中轴线为对称轴对称设置;
2.根据权利要求1所述的一种表演机器人,其特征在于,所述胸部组件包括气缸、滑块、转接板、连杆、滑轨和至少四个液压缓冲器;
3.根据权利要求1所述的一种表演机器人,其特征在于,所述驱动组件还包括机座、电机和轴承部件,所述转轴的中部套设于所述机座,所述电机与所述机座的一侧固定连接,所述第一曲柄摇杆机构的端部套设于所述电机的一侧的输出轴并可沿所述输出轴进行旋转,所述第二曲柄摇杆机构的端部套设于所述电机的另一侧的输出轴并可沿所述输出轴进行旋转;
4.根据权利要求2所述的一种表演机器人,其特征在于,所述第一曲柄摇杆机构包括上曲柄、上摇杆和摇臂,所述上曲柄设置在所述第一曲柄摇杆机构的端部,所述上曲柄的另一端与所述上摇杆的一端固定连接,所述上摇杆的另一端与所述上爪组件连接,所述摇臂的一端与同侧对应的所述连杆连接,所述摇臂的另一端与所述转轴的上方固定连接。
5.根据权利要求2所述的一种表演机器人,其特征在于,所述第二曲柄摇杆机构包括下曲柄和下摇杆,所述下曲柄设置在所述第二曲柄摇杆机构的端部,所述下曲柄的另一端与所述下摇杆的一端固定连接,所述第二摆臂的一端与同侧对应的所述连杆和所述下摇杆的另一端连接,所述第二摆臂的另一端与所述转轴的下方固定连接。
6.根据权利要求1所述的一种表演机器人,其特征在于,所述转轴包括万向节、上转轴和下转轴,所述上转轴的下方与所述万向节的上方连接,所述下转轴的上方与所述万向节的下方连接。
7.根据权利要求2所述的一种表演机器人,其特征在于,所述机架设有耳座,所述耳座以所述气缸为对称轴安装在所述气缸的左右两侧并且与所述气缸转动连接。
8.根据权利要求1所述的一种表演机器人,其特征在于,所述上爪组件还包括第一关节、第二关节和长连杆,所述第一关节的一端与所述第二关节的一端活动连接,所述第二关节的另一端与所述第一摆臂固定连接并且与所述肩座活动连接,所述长连杆的一端与所述第一关节的一端固定连接,所述长连杆的另一端与所述肩座固定连接。
9.根据权利要求1所述的一种表演机器人,其特征在于,所述下爪组件还包括第三关节、第四关节和曲连杆,所述第三关节的一端与所述第四关节的一端活动连接,所述第四关节的另一端与所述第二摆臂固定连接并且与所述轴承座活动连接,所述曲连杆的一端与所述第三关节的一端固定连接,所述曲连杆的另一端与所述轴承座固定连接。
技术总结
本技术涉及机械制造的技术领域,公开了一种表演机器人。该表演机器人包括胸部组件、驱动组件、上爪组件、下爪组件和机架,所述胸部组件与所述机架固定连接,所述胸部组件的驱动部与所述驱动组件连接,所述驱动组件的上端与所述上爪组件固定连接,所述驱动组件的下端与所述下爪组件固定连接;所述转轴安装于所述连接板上,所述转轴的中部套设于所述机座,所述转轴的上方与所述第一曲柄摇杆机构固定连接,所述转轴的下方与所述第二曲柄摇杆机构固定连接;所述第一摆臂与所述第一曲柄摇杆机构转动连接;所述第二摆臂与所述第二曲柄摇杆机构转动连接。本技术中的表演机器人具有结构简单、生动逼真和表演动作丰富的效果。
技术研发人员:李尚,刘岳林,唐作为
受保护的技术使用者:华强方特(深圳)科技有限公司
技术研发日:20230209
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!