一种饺子机用机械手的制作方法
本技术涉及餐饮设备,尤其涉及一种饺子机用机械手。
背景技术:
1、水饺机是一种自动化煮饺装置,一般具备冰箱、蒸煮锅以及取餐柜,通过内部机构动作将冰箱中的水饺放入到蒸煮锅,在蒸煮锅煮熟后将其水饺盛入打包盒,最后放置到取餐柜中等待取餐人员取餐。通过水饺机实现在无人管理情况下水饺的自动化蒸煮售卖,具有较广的市场前景。
2、目前,水饺机中通常使用机械手对水饺进行转运,但现有水饺机中的机械手需要翻转动作且需要其他机构的配合才能顺利实现转运,导致了机械手动作多余复杂,控制程序多,严重影响水饺机中水饺的转运效率。
3、因此,针对上述现有水饺机中机械手存在动作多余复杂、控制程序多进而严重影响水饺转运效率的现状,研发一种动作迅速高效的饺子机用机械手是急需解决的问题。
技术实现思路
1、本实用新型的目的在于,针对现有水饺机中机械手存在动作多余复杂、控制程序多进而严重影响水饺转运效率的问题,提出并设计一种动作迅速高效的饺子机用机械手。
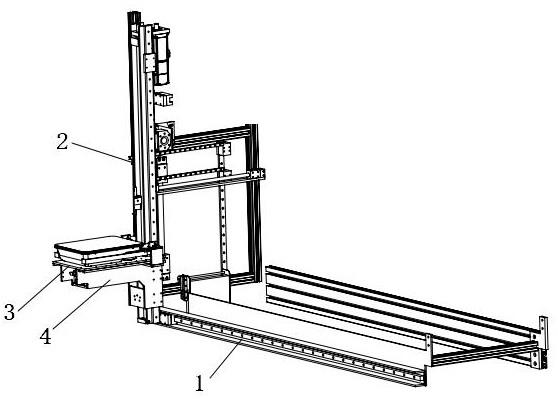
2、本实用新型为解决上述技术问题所采用的技术方案是:一种饺子机用机械手,包括左右水平移动机构,所述左右水平移动机构上滑动连接有升降机构,所述升降机构上滑动连接有支撑架,所述支撑架上安装有夹爪组件,所述夹爪组件上连接有夹爪开合驱动件以及夹爪前后平移驱动件,所述夹爪开合驱动件能够驱动夹爪组件进行开合,所述夹爪前后平移驱动件能够驱动夹爪组件进行前后移动,所述支撑架上设置有放置板,所述放置板上设置有通孔,所述放置板的下方设置有料盒固定叉组件,所述支撑架上还设置有拨叉组件。本方案与分体式水饺输送料盒配合,水饺输送料盒下部分被料盒固定叉组件卡住,水饺输送料盒上部分被夹爪组件夹着前移,进而实现水饺输送料盒上部分与下部分的错位,使水饺输送料盒中的水饺进入到蒸煮锅中,实现下水饺的动作;夹爪组件能够前后移动以及开合,实现对打包盒及输送料盒的前后移动及夹紧动作;左右水平移动机构以及升降机构实现支撑架左右方向和上下方向的移动,进而满足不同位置移动的需求;拨叉组件用于拨动蒸煮锅使蒸煮锅进行转动进而将蒸煮锅中的水饺倒入打包盒中。动作简易,三个维度的平移即可实现,省去了机械手的翻转动作,减少了水饺机中其他装置的程序控制,能够大幅提高效率。
3、进一步的,所述拨叉组件包括拨叉头和拨叉前后驱动件,所述拨叉头连接到拨叉前后驱动件上,所述拨叉前后驱动件能够驱动拨叉头前后水平移动。拨叉前后驱动件优选为气缸,在使用过程中起到的作用是,通过拨叉前后驱动件驱动拨叉头向前移动,进而使拨叉头探出并插入到与之相配合的蒸煮锅的插孔中,在升降机构的驱动下向下移动,进而拉动蒸煮锅使其翻转一定角度,将水饺倒入到机械手上的打包盒中,使水饺从蒸煮锅内转移到打包盒内的动作更加简单高效。
4、进一步的,所述料盒固定叉组件包括固定叉以及固定叉驱动件,所述固定叉连接到固定叉驱动件上。当放置板上放置料盒时,固定叉驱动件驱动固定叉动作将料盒下部分卡住进行位置固定。
5、进一步的,所述夹爪组件包括两个夹爪,所述夹爪内侧具有夹槽,所述夹爪位于放置板的上方,所述夹爪的后部与夹爪开合驱动件连接。夹爪开合驱动件优选为气缸。每个夹爪均由一个气缸驱动,实现开合动作,夹槽可卡到打包盒或料盒上进行限位。
6、进一步的,所述夹爪前后平移驱动件包括夹爪架和丝杠,所述丝杠安装在支撑架上,所述夹爪架通过螺母与丝杠连接,所述夹爪以及夹爪开合驱动件均安装于夹爪架,所述夹爪架通过滑块导轨结构与支撑架连接。实现对卡爪前后移动的驱动,且不影响卡爪在前后方方向移动过程中的开合动作。
7、进一步的,所述夹爪架上设置有水平定位板,所述水平定位板位于放置板的上方,所述水平定位板上设置有定位孔。用于和水饺输送料盒上的定位插头配合,使用时,水饺输送料盒下降进而使定位插头插入到定位孔中,实现粗定位,以利于水饺输送料盒准确下降至放置板上。
8、进一步的,所述左右水平移动机构、升降机构均采用滚珠丝杆传动结构。
9、从以上技术方案可以看出,本实用新型具有以下优点:
10、本方案提供了一种饺子机用机械手,本方案在使用时与分体式水饺输送料盒配合,水饺输送料盒下部分被料盒固定叉组件卡住,水饺输送料盒上部分被夹爪组件夹着前移,进而实现水饺输送料盒上部分与下部分的错位,使水饺输送料盒中的水饺进入到蒸煮锅中,实现下水饺的动作;夹爪组件能够前后移动以及开合,实现对打包盒及输送料盒的前后移动及夹紧动作;左右水平移动机构以及升降机构实现支撑架左右方向和上下方向的移动,进而满足不同位置移动的需求;拨叉组件用于拨动蒸煮锅使蒸煮锅进行转动进而将蒸煮锅中的水饺倒入打包盒中。动作简易,三个维度的平移即可实现,省去了机械手的翻转动作,减少了水饺机中其他装置的程序控制,能够大幅提高效率。
技术特征:
1.一种饺子机用机械手,其特征在于,包括左右水平移动机构,所述左右水平移动机构上滑动连接有升降机构,所述升降机构上滑动连接有支撑架,所述支撑架上安装有夹爪组件,所述夹爪组件上连接有夹爪开合驱动件以及夹爪前后平移驱动件,所述夹爪开合驱动件能够驱动夹爪组件进行开合,所述夹爪前后平移驱动件能够驱动夹爪组件进行前后移动,所述支撑架上设置有放置板,所述放置板上设置有通孔,所述放置板的下方设置有料盒固定叉组件,所述支撑架上还设置有拨叉组件。
2.如权利要求1所述的饺子机用机械手,其特征在于,所述拨叉组件包括拨叉头和拨叉前后驱动件,所述拨叉头连接到拨叉前后驱动件上,所述拨叉前后驱动件能够驱动拨叉头前后水平移动。
3.如权利要求1所述的饺子机用机械手,其特征在于,所述料盒固定叉组件包括固定叉以及固定叉驱动件,所述固定叉连接到固定叉驱动件上。
4.如权利要求2所述的饺子机用机械手,其特征在于,所述夹爪组件包括两个夹爪,所述夹爪内侧具有夹槽,所述夹爪位于放置板的上方,所述夹爪的后部与夹爪开合驱动件连接。
5.如权利要求1所述的饺子机用机械手,其特征在于,所述夹爪前后平移驱动件包括夹爪架和丝杠,所述丝杠安装在支撑架上,所述夹爪架通过螺母与丝杠连接,所述夹爪以及夹爪开合驱动件均安装于夹爪架,所述夹爪架通过滑块导轨结构与支撑架连接。
6.如权利要求5所述的饺子机用机械手,其特征在于,所述夹爪架上设置有水平定位板,所述水平定位板位于放置板的上方,所述水平定位板上设置有定位孔。
7.如权利要求1所述的饺子机用机械手,其特征在于,所述左右水平移动机构、升降机构均采用滚珠丝杆传动结构。
技术总结
本技术提供了一种饺子机用机械手,涉及餐饮设备技术领域,采用的方案是:包括左右水平移动机构,所述左右平移机构上滑动连接有升降机构,所述升降机构上滑动连接有支撑架,所述支撑架上安装有夹爪组件,所述夹爪组件上连接有夹爪开合驱动件以及夹爪前后平移驱动件,所述夹爪开合驱动件能够驱动夹爪组件进行开合,所述夹爪前后平移驱动件能够驱动夹爪组件进行前后移动,所述支撑架上设置有放置板,所述放置板上设置有通孔,所述放置板的下方设置有料盒固定叉组件,所述支撑架上还设置有拨叉组件。本技术解决了现有水饺机中机械手存在动作多余复杂、控制程序多进而严重影响水饺转运效率的问题。
技术研发人员:孙相杰
受保护的技术使用者:青岛一六正月科技有限公司
技术研发日:20230213
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!